飞控系统四余度惯性测量系统的相关技术研究
2024-03-10罗慕成
罗慕成
(中国直升机设计研究所,天津 300000)
随着技术的进步,直升机的飞控系统起着越来越重要的作用。惯导系统是飞控系统的重要组成部分,其核心部件常由速率陀螺组、加速度计、安装平台和计算机等构成。惯导系统输出数据给飞控计算机,用以实现控制律的解算,从而控制直升机舵面使直升机以一定的高度、速度及姿态稳定飞行。光纤陀螺具有启动时间短、消耗功率低、响应速度快等优点,但是输出信号包含随机漂移。本课题结合常见的直升机控制特点,采用开环光纤陀螺敏感姿态信号、石英加速度计敏感加速度信号,同时引用加速度信号辅助陀螺输出姿态信号。本文研究的飞控系统惯性测量系统可适用于大多数直升机飞行场景,且裕度高,成本低。
1 惯性测量系统硬件设计
1.1 速率陀螺组的选择
测量飞行器角速率的陀螺仪属于成熟部件,常见的光学陀螺是利用的Sagnac 效应,其中光纤陀螺采用的光纤传感技术是利用光纤作为载光媒介,对传输光的某一特性根据被测量参数的变化进行调制,然后检测出其变化的传感技术。本文采用了开环光纤陀螺。
1.2 加速度计的选择
加速度计是测量飞行器视加速度的惯性仪表,其测量原理是基于牛顿第二定律。本文采用的石英振梁加速度计是一种典型的微机械惯性器件,其结构包括测频电路、敏感质量、石英谐振器、挠性支撑等。
1.3 惯性测量系统余度设计
飞控系统影响直升机飞行安全,配置余度常采用保守的设计方式。在研究民航客机的飞控余度设计后,提出一种四余度架构,使用4 套计算机构筑相似的四余度系统。每个通道均使用一条指令支路和一条监控支路。惯测为配合飞控系统的整体余度设计,采用四余度相似通道的设计。一套惯性测量系统包括惯性敏感组件(ISA)4 组,每组ISA 包括3 个开环光纤陀螺、3 个石英加速度计以及安装台体,开环光纤陀螺和石英加速度计正交装配。同时,每组ISA 需配备相对应的电子线路组件,每组电子线路组件包括综合信息处理板,用以处理惯性敏感组件的输出信号。通过增加监控支路实现信号的自监控,同时设立信号表决机制将多路来源的信号进行处理,实时比较4 路数据差值,当差值大于门限,判断该路数据不一致,采用多数通道的数据,剔除少数通道的数据,当出现1:1 的数据输出时,飞控系统剔除所有的通道数据,此时飞控系统仅具备基本的开环控制能力。
2 信号处理的算法研究
本文采用的开环光纤陀螺的精度有限,在使用过程中会发生漂移。漂移是综合误差的体现,主要来源于陀螺光路和陀螺电路。具体误差源包括光路的偏振误差、温度引起的热光效应误差、振动引起的弹光效应误差、调制解调误差,电路的驱动控制模块精度、后级输出模块精度等。在飞行中,当惯测长时间工作,其四个单元的输出误差可能随时间累积超出预设的四通道不一致门限从而引发故障。因此,在工程实践中开环光纤陀螺需建立其数据的数学模型并对其进行滤波、除噪等处理,此外本文还引入了加速度信号辅助开环光纤陀螺输出姿态角以提高导航系统的准确性。
2.1 算法设计
当直升机运动加速度较小,惯测采用重力加速度在机体系三轴向的投影来估计直升机姿态角误差,实现对惯测输出值的修正,称该种模式为ACC 组合模式。当惯测无法进入ACC 组合模式,其输出精度主要取决于陀螺性能。当直升机有运动加速度时,惯测进入ACC 组合模式后,其输出的姿态角可能造成误修正。因此设置了组合进入门限,门限的取值在加速度运动带来的姿态角估计误差与开环光纤陀螺精度差带来的姿态角误差之间进行了综合考虑。通过在试验中调整组合参数,拓展组合模式适用的飞行场景,使得惯测输出的数据更为精确。本文重点研究惯测进入ACC 组合的角速度和加速度门限。
若连续2s 均同时满足条件1 和条件2 时,则进入ACC 组合模式,否则退出。
条件2:进入组合的加速度门限:
2.2 适用的飞行场景
本文展开分析满足触发直升机加速运动条件的其中一种典型工作场景,即载机沿水平方向匀加速运动载机加速时低头,减速时抬头。假设载机以加速度a 匀加速运动,见图1。
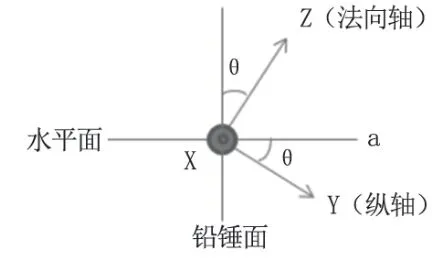
图1 载机匀加速运动时机体轴指向
此时,载机会低头,使得法向过载fZ在水平面的投影提供加速度a,在铅锤面的投影抵消重力加速度g。此时X、Y、Z 加计输出特性如下:
当比力>0.04g 时,对应的前向加速度的数值:
则
以前向加速度为0.286g 为例,计算俯仰角、横滚角的修正误差:
俯仰角计算公式:
当a=0.286g 时,根据俯仰角计算公式,0.286g的水平加速度有可能造成俯仰角估计误差最大值为:。
但由于直升机速度一般为200km/h ≈56m/s,地速从0 加速到56m/s 的时间为:,同时ACC 组合误差修正方案限制了每2s 修正门限2′,所以惯测系统在20s 内对俯仰角的最大误修值为20′=0.33°。
可见,虽然水平加速度越大,姿态角修正误差越大,同时在惯测修正时,设置单拍修正门限。因此,惯测的实际修正数值是水平加速度、单拍修正门限、修正时间综合作用的结果。当水平加速度为a,加速运动结束时的地速为V 时,ACC 组合造成的俯仰角最大误修值计算公式为:
计算不同大小水平加速度a 造成的惯测系统姿态误差,取a 可能造成俯仰角估计误差和以ACC 单拍修正门限修正左列时间达到的俯仰角误修正数值中的较小数,实际俯仰角误修数值见图2。
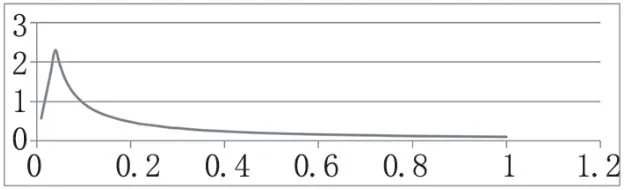
图2 水平加速度a 造成的姿态修正误差
实际修正误差跟前向加速度不是线性增长关系,当前向加速度为0.04g 时,惯测系统俯仰角瞬间误修正数值最大,但不超过2.5°。
针对上述场景下ACC 组合误修正分析结论:对于载机典型水平加速运动场景,惯测进入ACC 组合模态,横滚角不会发生误修正;由于有姿态误差单拍修正门限的限制,以及载机加速时间有限,俯仰角瞬间误修正数值小于2.5°。
采用同样的方式展开分析各种带加速运动的典型场景,如直升机有垂向加速度且无水平加速度的运动场景等,应选取合适的门限避免载机退出ACC 组合,且门限数值的选取应适当排除一些极端情况下的错误修正。
3 仿真结果分析
针对本文研究的飞控系统搭建了半物理仿真环境,在该环境中模拟直升机的飞行。搭配高精度的激光惯导,该惯导可反映真实的直升机角速率及加速度,其输出信号作为正确姿态判断本文研究的惯测系统输出值是否正常。
3.1 未进入ACC 组合模式
测试在平飞加速时的飞行工况,仿真结果如图3、图4 所示。
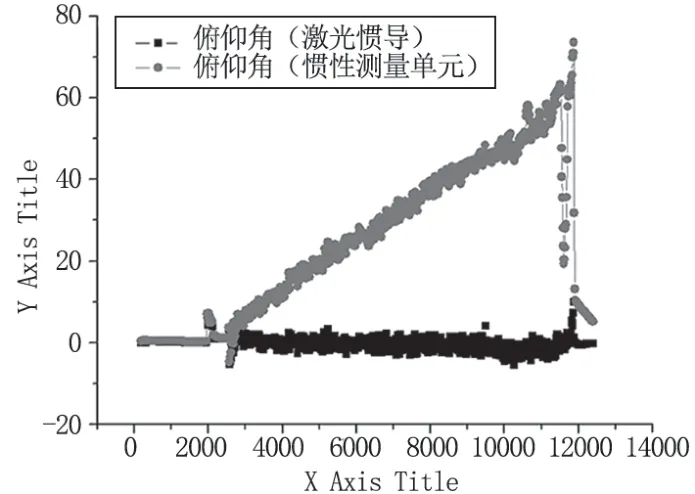
图3 惯测系统输出的俯仰角与激光惯导对比

图4 惯测系统输出的横滚角与激光惯导对比
可以看出:(1)与激光惯导相比,惯测系统的俯仰、横滚误差在导航后均迅速增加;(2)惯测的俯仰轴陀螺漂移约为20°/h,横滚轴陀螺漂移约为-40°/h,可见该次飞行中惯测的陀螺漂移误差大,在长时间飞行中误差累积较快。
3.2 进入ACC 组合模式
测试起飞后存在水平加速及垂向加速时的飞行工况,仿真结果如图5、图6 所示。
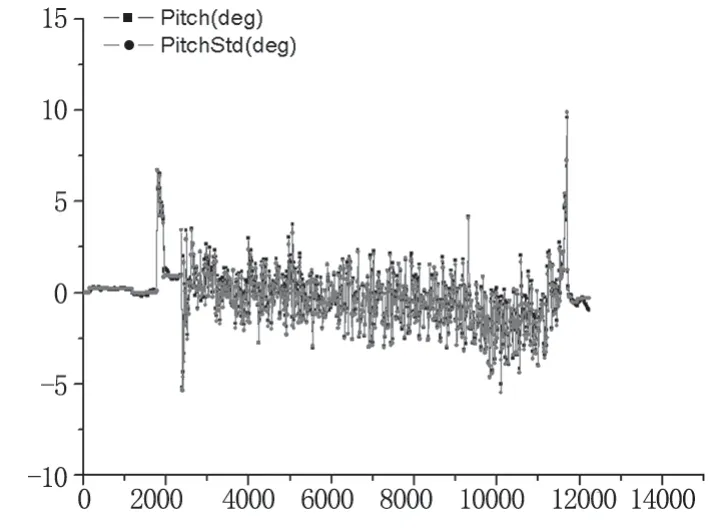
图5 惯测系统输出的俯仰角与激光惯导对比
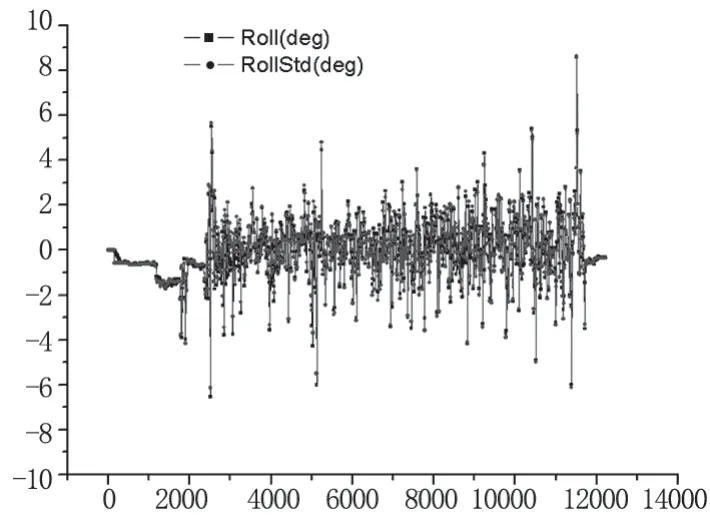
图6 惯测系统输出的横滚角与激光惯导对比
以激光惯导输出的俯仰角、横滚角为基准,计算惯测输出的俯仰角、横滚角误差分别为0.196°、0.266°,满足飞控系统精度需求。
3.3 仿真结论
仿真结果表明,引入加速度计算姿态信号后,可有效提高惯测动态性能,输出的姿态信号可满足飞控系统的需求。
4 结语
飞行中,当惯测长时间用开环光纤陀螺输出姿态角,随时间累积漂移误差大,当4 个通道输出的信号出现了较大超差后系统就会报故障。本文引用加速度信号修正姿态数据,并设置合理的进入门限,根据仿真结果,其输出的数值满足飞控系统的需求。这个结果对多余度的惯导系统有着非常重要的意义。在实际工程中,惯导采用多余度的开环光纤陀螺和加速度计组合输出,既可提升系统的可靠性,降低部件失效概率,又能降低成本,具有很高的实用性。
