基于无人机技术的河道划界及精度分析
2024-03-08吴海波
吴海波
(安徽省地质矿产勘查局325地质队,安徽 淮北 235000)
0 引言
在测绘工程中,由于专业相机价格昂贵,实际工程中常采用普通相机对其进行替代,但由于普通相机存在光学畸变现象,会影响测绘的拍摄精度,为提高无人机测绘的准确性,需对其测量误差进行分析,近年来,许多专家学者针对无人机摄影技术及其勘探误差开展相关研究。
王晶等人[1]采用无人机摄影技术,对某地区进行摄影测量,并分析不同因素对其测量精度的影响,结果表明,采用PPK技术对无人机拍摄数据进行处理后,可有效提高其摄影测量精度。宋倩等人[2]以某地区为研究对象,采用无人机对该地区进行勘探,并建立其三维模型,分析该技术的测量误差,结果表明,采用无人机勘测的误差小于规范所规定的的限值,其可行性较高。侯树宏等人[3]以某边坡为研究对象,提出无人机摄影测量方法,对该边坡进行测绘,并分析测绘地形对其测绘精度的影响,结果表明,坡度与分辨率会显著影响其勘测精度,且与其勘测精度呈线性相关关系。张波等人[4]以某山区为研究对象,基于无人机摄影测量技术,对该地区进行勘探,并对该技术的精度进行评估,结果表明,无人机摄影测量的精度主要受图像校正影响,当测量区域为底起伏区时,其测量准确性较高。王成等人[5]以某露天矿山为研究地下,采用无人机倾斜摄影技术,建立其三维模型,并分析该技术的准确性,结果表明,该技术的成本低、效率高,且精度可达到规范限值,该方案的可行性良好。
本研究以某河道为研究对象,采用无人机航摄技术,提出无人机低空摄影测量系统,对其进行河道划界,并分析其勘测精度,进行畸变差检校,以提高其测绘的准确性。
1 无人机低空摄影测量系统
本研究采用无人机摄影对河道进行划分,并分析其测绘精度,在拍摄前,对相机进行畸变差检校,拍摄结束后,对其进行畸变差处理,以提高其测绘的准确性,测绘所采用的的相机检校结果如表1所示。采用SIFT算子和Harris算子结合进行影像匹配,首先提取SIFT特征点、Harris点,对其进行相对定向,得出内集点A、B,删除重复点,并合并内集点A、B,得出内集点C,删除内集点C中的错误匹配点,得出内集点D,然后构件同名三角形,或许新角点,通过相对定向得到内集点E,合并内集点D、E后,判断点数是否满足要求,如满足要求,即匹配结束,如图1所示。本研究采用PIX4D对无人机得到的航拍数据进行处理,首先导入无人机的航拍照片、控制点文件,加载POS数据,然后设置工程相关参数,进行空三加密处理,最后生成数字高程模型(DEM)、正射影像图(DOM),进行成果输出。在得出DOM模型后,计算出设计洪水位线数据,最后在ArcGis软件中完成河道划界。

图1 Harris算子和SIFT特征的影像匹配流程图

表1 相机检校结果
为分析无人机低空摄影测量系统的测绘精度,需建立其精度分析指标,根据《低空数字航空摄影测量内业规范》[6]得出高程模型精度指标如表2所示、平面位置精度中误差指标如表3所示、高程精度中误差指标如表4所示。

表2 高程模型精度指标

表3 平面位置精度中误差指标

表4 高程精度中误差指标
2 工程概况
本研究以某河道为研究对象,该河道属于长江的一级支流,全长1 345 km,流域面积为16万 km2,流域地形呈锅形,四周为丘陵山区,占80%;中间腹部为低洼圩区和河湖水面,占20%。地势从南向北倾斜,上游坡度和扇面大,中下游坡度缓,共有大小十六条支河汇入,是一个典型的一干多支树状型河道,该流域大多为山丘河道,具有源短、坡陡、流急、汇流快的特点。本研究采用无人机航摄技术应用于该河道,对其进行河道划界,该无人机的相关技术指标如表5所示。

表5 无人机的相关技术指标
像控点的布设是参考像控点的布设原则去进行点位选取和测量的,在此次航飞任务中共布设181个像控点,点位平均分在测区范围内,平均500 m一个点。
3 无人机摄影测量误差分析
在测绘工程中,由于专业相机价格昂贵,实际工程中常采用普通相机对其进行替代,但由于普通相机存在光学畸变现象,会影响测绘的拍摄精度,为提高无人机测绘的准确性,需对其测量误差进行分析。点位中误差(M)计算公式如式(1)所示。
(1)
式中:i=1,2,3,4……n;n为检测点个数。
由于本研究所采用的无人机低空摄影测量系统会输出生成数字高程模型(DEM)、正射影像图(DOM)作为勘测结果,故需要对DEM(数字表面模型)、DOM(数字正射影像图)的精度及误差进行分析。本研究选取50个检测点进行DEM精度检测,其高程检查点精度表如表6所示。
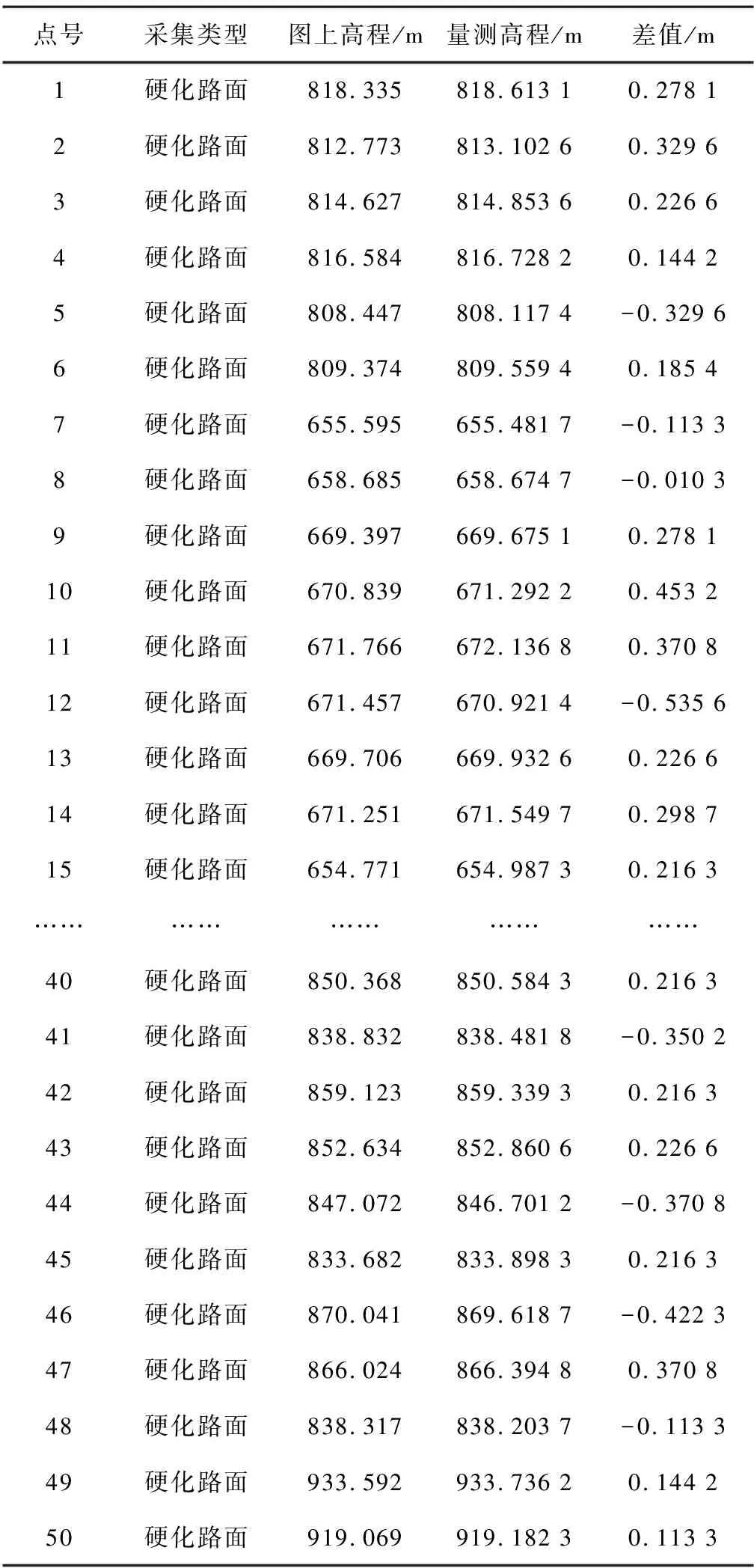
表6 高程检查点精度表

选取100个检测点进行DOM精度检测,其平面检测点精度表如表7所示。
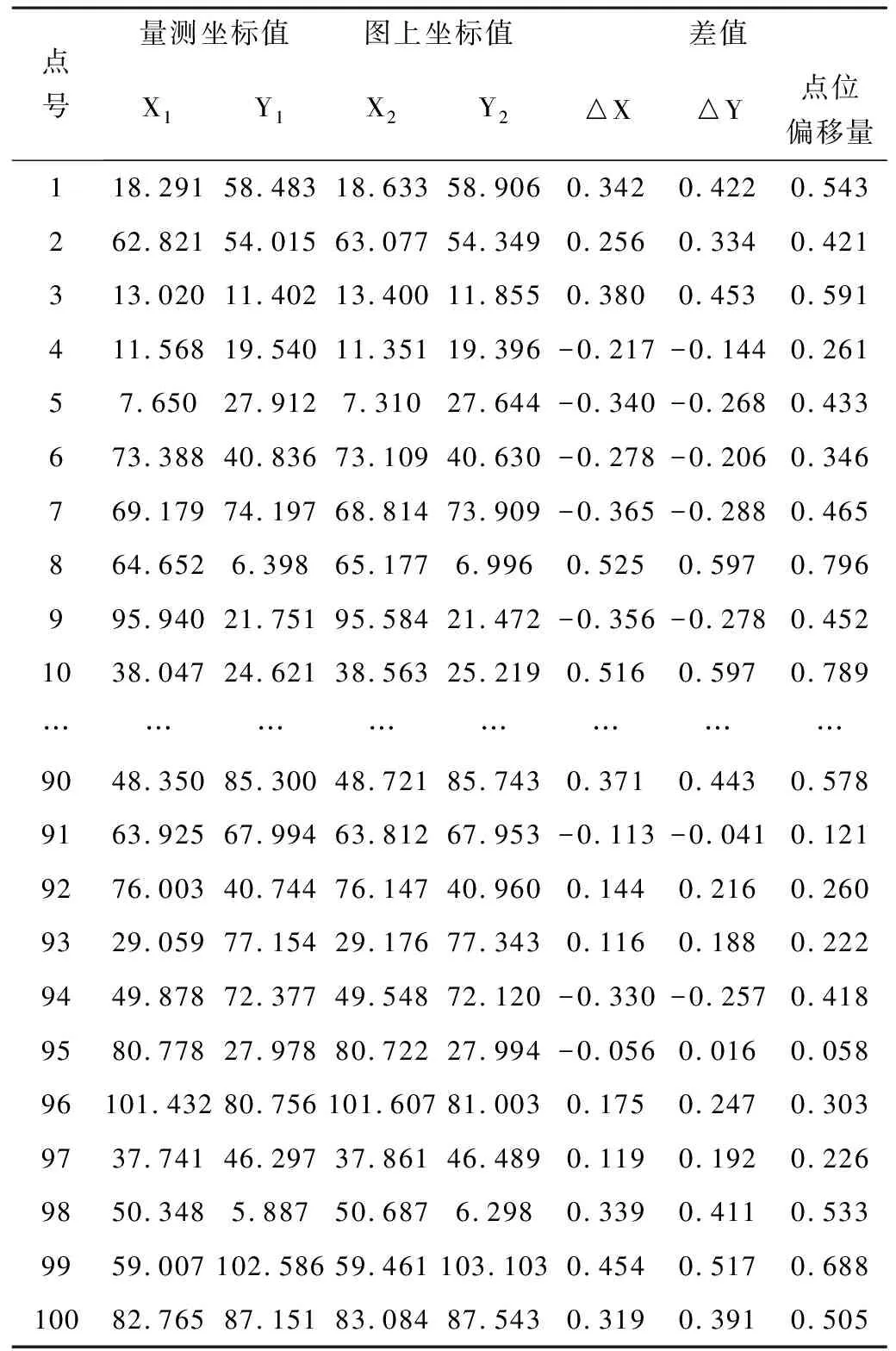
表7 平面检测点精度表
4 结语
本研究以某河道为研究对象,采用无人机应用于该河道,提出无人机低空摄影测量系统,对其进行河道划界,并分析其勘测精度,得出以下结论:
(1)同监测点的高程精度具有一定的差异性,对比图上高程与量测高程可得,监测点12的误差最大,二者间的差值为-0.535 6 m,监测点8的误差最小,二者间的差值仅为-0.010 3 m。
(3)平面检测点X、Y方向的误差具有一致性,且Y方向的差值大于X方向的差值,其中,监测点10的X、Y方向及点位移偏量均有最大值,其值分别为0.516 m、0.597 m及0.789 m,监测点95的X、Y方向及点位移偏量均有最小值,其值分别为-0.056 m、0.016 m及0.058 m。
