乔木幼苗自动植树机机械结构设计
2024-03-08张学娇任呈祥
冯 博,张学娇,任呈祥
(1.唐山钢铁集团有限责任公司热轧事业部,河北 唐山 063000;2.廊坊展翔精密机械有限公司,河北 廊坊 065001;3.华升富士达电梯有限公司,河北 廊坊 065001)
0 引言
随着全球变暖越来越严重,沙漠化已经成为不可忽视的全球性挑战。沙漠化涉及100 多个大国、10亿多人口,几乎覆盖了全球三分之一的土地,其中亚洲、非洲等一些发达经济体的土地更加严重,这一点也更加凸显了沙漠化的严重性[1-4]。由于强烈的大风,土地风蚀荒漠化更加严重,同时也加剧了中国土地的荒漠化程度[5-7]。
三北防护林体系工程在中华人民共和国改革开放政策下,自1978 年启动至今,已完成前五期工程建设任务,获得了令全球关注的巨大成果。一期(1978—1985 年)、二期(1986—1995 年)、三期(1996—2000 年)、四期(2001—2010 年)、五期(2011—2020 年)工程均实现了预期效果,而第六期工程也在积极推动中[8-13]。随着三北地区的植被恢复,森林覆盖率不断提高,该地区的环境质量得到极大的改善,同时也带来了巨大的生态、经济、社会价值,为当地的农业可持续发展及居民的福祉带来积极的影响。因此,推广机械化、自动化发展生态防护林具有重大的社会意义。基于此,本文提出了一种乔木幼苗自动植树机构,并主要对抓放苗装置、捧土覆土装置和植苗机驱动方式进行了设计。
1 整体设计
在全自动植树机控制系统设计的过程中,需要从实际需求出发,认真规划设计思路,并对全自动植树机控制系统进行贴合实际的、系统的分析,从而提出正确的控制系统的具体设计方案。
1.1 抓放苗机构设计
拨苗装置是一种重要的工具,它可以帮助人们按照一定的顺序从苗箱中取出树苗,并将它们放在指定的位置。它的作用是保证每棵树苗都能被正确地取出,避免树苗损坏。目前树苗的抓放苗机构有两种设计方案,具体如下。
方案一:采用机械手送苗,如图1 所示。整个设计由齿轮箱、机械手、限位开关等组成。采用电机作为动力源,由齿轮箱传导,控制一副机械手运动实现抓取,可以通过两个限位开关来精确控制机械手的两个极限位置。但是由于机械手的结构复杂,成本也相对较高,因此实际应用比较少。

图1 抓放苗机构1
方案二:采用曲柄摇杆式拨苗机构,如图2 所示。整个设计由转轴、齿轮-连杆、机架、苗箱等组成,且机架与苗箱相连,其特征在于采用了一种简易的曲柄摇杆机构,可以通过控制摇杆对苗箱中的树苗进行投放。这个设计旨在提高植物投放速度、扩大覆盖范围。

图2 抓放苗机构2
方案二的曲柄摇杆机构虽然结构简单,操纵起来也更加容易,但是其投放精准度难以控制,容易在投放过程中对植物幼苗产生损坏,对植物幼苗生长存活产生负面影响,导致其生产效率不够理想。综合考虑,方案一可以实现精准控制,因此本文采用方案一的抓放苗机构设计。
1.2 捧土覆土装置设计
捧土覆土装置是一种用来确保苗木生长良好的设备,它能够将土壤压实,从而提高苗木的存活率。它的使用质量直接关系到苗木的存活率。
本文设计的捧土覆土装置包括机架、液压缸、连杆和模拟人体的模型。它的工作原理通常是通过液压缸来调节操纵方向,而模拟人体的模型可以更有效地将泥沙捏合在一起。此外,这种设备的施加力量呈斜向,能够更有效地使泥沙按照需求进行分布,有助于植物的健康生长。如图3 所示,可以看到一个完整的捧土覆土装置三维模型。

图3 捧土覆土装置三维模型
在这个设计中,采用了一种特殊的橡胶覆盖的镇压轮,如图4 所示。这种材料既能提高覆土镇压的效率,又能缩小土壤的空间,从而起到防潮的作用,保证植株的健康生长。同时,为了满足各种工作条件的需求,在连杆的一端设计安装了一个压力弹簧,它能够控制镇压轮的位置,使其能够稳定地贴合地面,并且能够根据需要随时调节其压力,从而防止由于预紧力太强而导致土壤板结。

图4 覆土镇压轮
1.3 植苗机驱动方式设计
为使植苗机构达到最佳运行状态,需要优化液压马达系统的设计,植苗机液压系统原理图如图5所示。本植树机的设计主要面对乔木幼苗胸径为5 cm~6 cm,高度为1 m~1.5 m 的植树过程,在路的两侧或大面积苗圃中进行工作,植树机一次装载后需要种植的数量在100 棵左右。根据植物生长需求,将植物的株距p调整为1 m~3 m,将操作车辆的行驶速率调整到2 km/h~6 km/h,并将植物的播种速率调整到5 s/棵,最终栽植6 棵植物的株距是120 mm,以此计算植苗机构达到最佳运行状态的参数,选择最优型号的传动液压马达,以保证植苗机构的最佳性能。
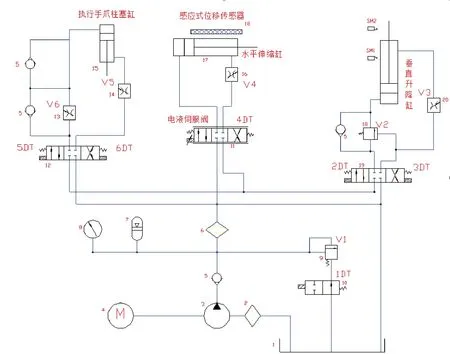
图5 植苗机液压系统原理图
投苗速度计算公式如下:
带轮转速计算公式如下:
拖拉机行走速度计算公式如下:
经过计算发现,当带轮转速达到57.6 r/min 时,宜采用400 mL/r 的传动液压马达,这样乔木幼苗自动植树机构就能够实现0.864 km/h~2.25 km/h的最佳性能。通过对乔木幼苗自动植树机抓放苗装置、捧土覆土装置和植苗机驱动方式进行设计,使得乔木幼苗自动植树机满足了种植要求。
2 结论
传统的人工植树方式效率低下,人工作业辛苦,且树苗成活率低。基于此,本文提出了一种乔木幼苗自动植树机构,主要对抓放苗装置、捧土覆土装置和植苗机驱动方式进行了设计。本文设计的抓放苗装置成本较低,且具有投放精度高、幼苗存活率高的优点,同时配合捧土覆土装置能保证较高的种植速度与效率。长期以来,我国一直十分关注生态绿化领域的建设与发展,并在这方面取得了不少成果,研究设计了诸多高效、先进、多样化的植树机械。随着社会经济的发展以及人们生态意识的增强,需要在生态绿化领域付出更多的努力,以应对更多挑战。同时,积极推广生态防护林的机械化、自动化种植技术,有助于实现更高的生态、经济、社会价值。
