一种新型温室喷药机器人的研制*
2024-03-08张沛文杨秀芳吴忠林王平泉
张沛文,杨秀芳,吴忠林,王平泉
(扬州工业职业技术学院,江苏 扬州 225127)
0 引言
随着全球人口的不断增长以及对农产品的需求不断增加,农业生产的现代化和高效化已成为当前和未来的发展方向。在农业现代化的进程中,温室种植以其优质、高产、高效、节水等优点,逐渐成为重要的种植模式之一。然而,传统的温室喷药手段存在着许多问题,如人工喷洒农药,药液喷洒浪费并存在工人中毒风险;铺设管道喷药,喷洒不均匀,污染环境,无法满足立体农业的施药需求。
近年来,随着机器学习、导航技术、图像识别技术等先进技术的快速发展,机器人在农业生产中发挥着越来越重要的作用。温室喷药机器人作为其中的一项重要应用,以其高效、精准的特点,受到了市场的瞩目和迫切的需求。因此,研发一种新型的温室喷药机器人,不仅可以提升我国农业生产的效率和质量,还可以减少资源浪费、保护环境,对于促进农业现代化发展具有积极的意义。
1 温室喷药机器人整体架构
本温室喷药机器人由联合式底盘、视觉系统、磁道航系统和喷药机构等组成,可以实现自动导航、植物监测、精准喷药等功能[1],整体3D造型如图1所示。温室喷药机器人的底盘设计采用了联合式结构,由两个对称的履带式移动机构组成,可以适应不同地形和温室环境。这种设计具有较高的越障能力和稳定性,能够保证机器人在温室内的移动和操作精度。视觉系统是温室机器人的重要组成部分,它由两个高清摄像头和一套图像处理系统组成。摄像头安装在机器人顶部,可以拍摄温室内的全景图像,并通过图像处理系统进行实时分析和处理[2]。通过图片数据处理可以对温室内的植物生长情况、病虫害情况进行监测和识别,为后续的精准施药提供数据支持。磁道航系统是一种基于磁场导航的路径规划方法,它由一组磁道和磁传感器组成。磁道预先设置在温室内的指定位置,机器人通过磁传感器读取磁道的磁场信息,从而确定自身的位置和方向。该系统可以实现精确的路径规划和自主导航,确保机器人在温室内的移动精度和效率。喷药机构是温室机器人的核心执行机构之一,它由药液储存装置、泵送装置和喷头组成。药液储存装置可以容纳一定量的农药,通过泵送装置将药液输送到喷头,最后将药液喷洒到温室内的植物上[3]。
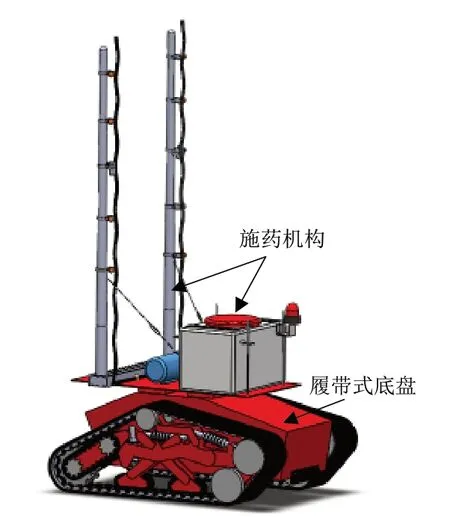
图1 智能喷药机器人3D造型
2 联合式底盘
为了适应温室大棚复杂的工作环境,本喷药机器人的底盘设计采用了与传统履带式“四轮一带”结构不同的“五轮一带”结构,即联合式底盘[4]。这种设计包括行驶系、轮系、张紧装置以及悬挂等组成部分。轮系是该底盘设计的主要组成部分,它主要由驱动轮、支撑轮、诱导轮、拖带轮和链轮等组成,如图2所示。驱动轮用于提供动力,支撑轮则起到保持履带链条正确位置和张紧状态的作用。拖带轮的作用是防止履带板侧向摆动,而链轮则分布在履带链条的底部,起到支撑和稳定的作用。这种底盘设计使得施药机器人具备良好的稳定性和机动性,能够适应温室大棚复杂的工作环境。

图2 联合式底盘结构示意图
为了满足本文大棚地形需求,参考选择使用履带式底盘车Safari-880T,如图3 所示。可承载100 kg 的设备无所不至。悬挂采用克里斯蒂+玛蒂尔达四轮组平衡悬挂,可适应重载避震。全车安装6 枚避震器组合独特的撞击吸能设计,可有效地减少地形冲击。适用于温室大棚复杂环境下的机器人移动解决方案。
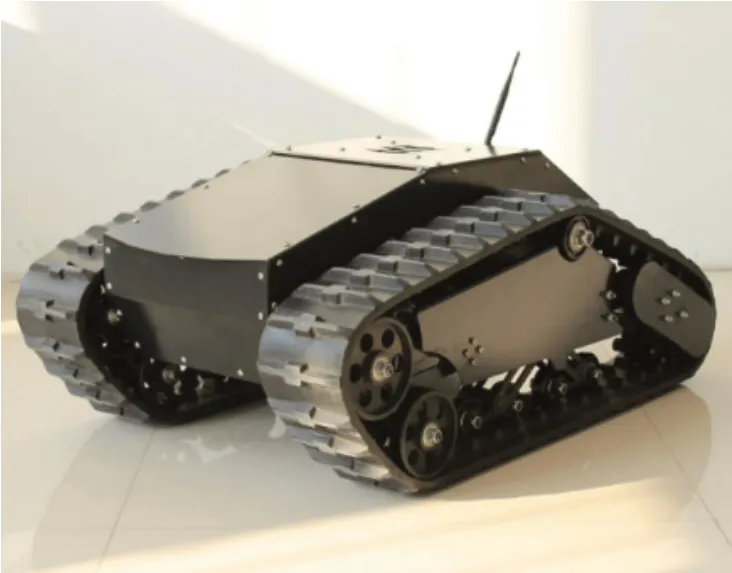
图3 履带式底盘车Safari-880T
3 视觉系统
喷药机器人的视觉系统是现代农业生产中智能化技术的重要应用之一。它不仅综合了高清图像捕捉、实时数据处理、光谱分析等多项先进技术,还为农业生产提供了全面而精准的支持,实现了农业生产的自动化和智能化。该视觉系统采用了Pixy 相机,这是一种专门为机器人视觉应用设计的设备。Pixy相机不仅可以实时捕捉农作物的生长情况,还拥有强大的图片处理能力,能够为机器人提供清晰且准确的视野,从而能够精准地观察和识别植物。在喷药机器人的视觉系统中,全卷积神经网络(FCN)操作也是一项关键技术。FCN 是一种深度学习算法,可以自动学习图像特征,并进行像素级别的语义分割。在喷药机器人的视觉系统中,FCN 可以用于目标区域识别和喷药区域的精准定位,从而提高了喷药的准确性和效率。
3.1 基于全卷积神经网络(FCN)的农作物病虫害识别算法
全卷积神经网络(Fully Convolutional Networks,FCN)是一种端到端的图像分割方法,它由Shelhamer等在2014 年提出。这种网络设计基于全卷积层替换了末尾的全连接层,使得网络可以接受任意尺寸的输入图像,并产生相同尺寸的输出。FCN 的主要优势在于它能够像素对像素地进行预测,直接生成与输入图像相同大小的分割图。此外,FCN 还具有端到端的训练、能够处理任意大小的输入图像以及参数较少等优点。它也被广泛用于语义分割、物体检测和人脸识别等领域。
FCN 是一种特殊的卷积神经网络,它的主要特点是将全连接层替换为卷积层,使得网络输出不再是类别,而是热力图或类别分布。这样做的好处是,可以将图像的语义信息编码到网络的最后一层,从而在输出端得到一个像素级别的预测。在传统的卷积神经网络中,最后一个全连接层通常会输出一个固定长度的向量,这个向量的长度通常与类别的数量相等。这个向量的每一个元素都代表了对应类别的概率,因此,可以认为这个向量的每一个元素都是一个像素的类别概率。然而,由于全连接层对输入的尺寸有要求,因此在进行卷积和池化操作后,需要对图像进行上采样或下采样来匹配全连接层的输入尺寸。这样做可能会导致图像的分辨率降低,从而影响了输出的精度。而FCN 通过将全连接层替换为卷积层,使得网络可以接受任意尺寸的输入图像。在FCN 中,最后一个卷积层输出的特征图仍然包含每个像素的类别信息,但是这个特征图的尺寸与输入图像的尺寸相同。因此,不需要对图像进行上采样或下采样来匹配全连接层的输入尺寸。这种方式不仅提高了网络的性能,而且使得FCN可以广泛应用于各种不同尺寸的图像。在FCN中,为了解决因为卷积和池化对图像尺寸的影响,确实提出了使用上采样的方式来恢复图像的原始尺寸。这种上采样通常通过转置卷积(也称为反卷积)实现。在转置卷积中,通过逆向地应用卷积操作来增加特征图的尺寸,如图4所示,具体来说,首先对特征图进行逐点乘积累加操作(与正常的卷积操作相反),然后再使用一些像素点的值来填充剩余的位置,以恢复原始的图像尺寸。这样做的效果是,可以在保持图像原始尺寸的同时,保留经过卷积和池化操作后的语义信息。

图4 FCN实现end-to-end图像语义分割
如图4 所示,FCN 的输入可以是任意尺寸的彩色图像。它的输出与输入的尺寸相同,这意味着它会生成一个与输入图像大小相同的输出图像。而输出图像的深度为21,这是因为网络被训练来识别20 个类别的目标加上背景,所以总共有21 个类别。每个像素在输出图像中都有一个类别标签,这通常表示该像素属于哪个类别(目标或背景)。
使用FCN 深度学习网络识别篱架型植物病虫害的好处在于,它可以对植物图像进行像素级别的分类和识别,从而精确地检测出病虫害的位置和程度。相比传统的人工识别方法,FCN 网络可以更快速、更准确地完成识别任务,大大提高了识别效率和精度。此外,FCN 网络具有较强的泛化能力,可以适应不同类型、不同生长环境的篱架型植物,为农业生产提供更全面、更有效的支持[5]。
3.2 Pixy深度相机
喷药机器人执行任务时,常利用高清摄像头,即Pixy 相机,如图5 所示,进行农作物情况的捕捉,具体相机参数如表1 所示。这款相机具备实时图像捕捉的能力,还拥有强大的图片处理能力,为机器人提供了清晰且准确的视野,从而能够精准地观察和识别植物[6]。此外,机器人的光谱分析功能使得它能够对植物的生长状态和叶片健康状况进行全面评估,同时,也能敏锐地检测到可能出现的害虫或病害,进一步提升了喷药机器人的工作效率和准确性。

表1 Pixy 深度相机参数
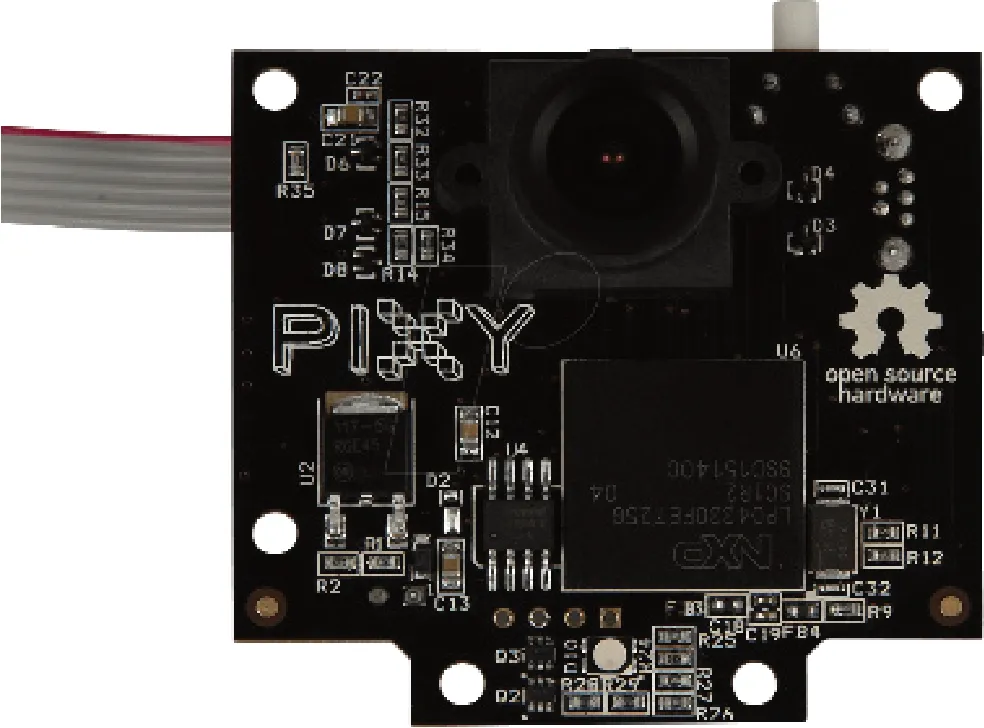
图5 Pixy深度相机
整套视觉系统通过实时数据处理技术,使机器人能够快速分析图像信息,作出实时决策,调整喷药策略,保证了高效的喷药执行。智能化的视觉系统支持温室喷药机器人能够在不同的环境条件下,以高度自适应的方式完成施药任务,为农业生产提供了可靠的技术支持。
Pixy 模块内置一颗恩智浦双核架构数字处理器,主频为204 MHz。NXP LPC4330 处理器,可处理分辨率1 280*800 50帧的图像,可对低像素图像中的区域进行实时识别与定位;支持UART、SPI、IIC 通信;能够识别多种不同颜色的目标区域,也可使用Pixy Mon 软件对任一区域进行标记学习,并获取目标图像[7]。
4 树莓派控制器
树莓派是一款开源的微型电脑,其系统基于Linux。它具有强大的计算能力和灵活的编程环境,可以用于执行各种自动化和智能化的任务。在病虫害检测方面,树莓派可以通过数据采集、数据存储、程序迁移等步骤实现。通过摄像头采集农作物图像信息,由树莓派微型计算机执行算法,进行图像处理。树莓派微型计算机通过数据存储器存储温室篱架型农作物病虫害图像识别处理过程中的各种数据,随后将树莓派微型计算机程序存储器中的农作物病虫害图像识别基本程序迁移到微型计算机中的程序存储器进行图像识别[8]。最终分析出植株的健康状况及染病类别。做到上述操作需用到树莓派4B,产品如图6 所示,其具有更快的处理速度、更多的内存和更丰富的I/O 接口。同时,树莓派4B 还支持Wi-Fi和蓝牙连接,方便用户进行无线连接和数据传输。

图6 树莓派4B处理器
树莓派4B 体积小巧,安装所需空间较小,可适用于本文的智能喷药机器人。同时系统操作简单,易于上手,对于用户群体来说较为友好,对于版本更迭升级灵活,可扩展性能强。采用深度学习等先进技术,提高了病虫害检测的准确率。对于智能喷药,起到了很大的提升作用,从而提升其防治效果。
5 磁导航系统
相较于传统的导航方法,如激光雷达或视觉识别,磁导航具有更强的抗干扰性和定位精度,能够稳定准确地运行于复杂环境中。本文设计的喷药机器人通过预先在温室大棚铺设的磁条轨道来预设行进路程。其工作原理基于磁场感应定律,利用传感器感知周围环境的磁场强度和方向。磁导航传感器通常包括磁场感应元件和信号处理电路两部分,如图7 所示。磁场感应元件可以是磁阻传感器、霍尔传感器等,它们的特性在受到外部磁场影响时会产生相应的电信号变化。这些变化反映了周围环境的磁场状态。信号处理电路负责将传感器采集到的电信号进行放大、滤波和转换,以便得到准确的磁场信息。通过合理设计的算法和电路,传感器可以将这些信息转化为具体的导航、定位数据。磁导航传感器的工作原理使得它们在缺乏GPS 信号或者需要高精度导航的场景下得到了应用[9]。在温室大棚中,环境复杂多变,磁导航传感器可以稳定准确地引导车辆进行自主导航,为自动化提供了可靠的技术支持。
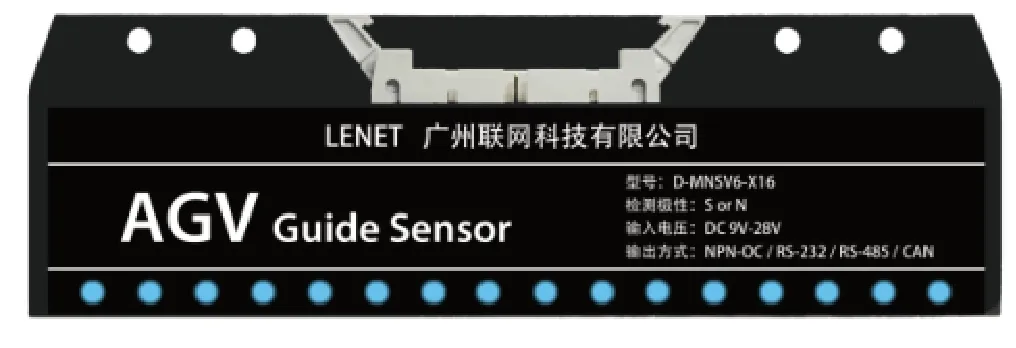
图7 磁导航传感器
本文设计的履带式智能施药机器人使用广州联网科技有限公司生产的D-MNSV6-X16 型磁导航传感器,D-MNSV6-X16 是专为AGV 磁条导航设计的一款工业级磁导航传感器。传感器具体参数如表2 所示,传感器布置于喷药机器人前端底部,为防止与贴地磁条间距离过大而导致磁感应过弱,设置为距离地面约5 cm。

表2 磁导航传感器参数
6 立式喷药机构设计
喷杆组件位于底盘上方,由于黄瓜为篱架型作物,喷杆以立式结构安装。该喷药机构由两个型材件构成,分别是垂直型材和水平型材。垂直型材用于支撑整个喷药机构,并使喷管及喷嘴固定在立柱上。水平型材则与垂直型材相连接,用铝合金角码固定,形成一个稳定的框架结构。喷杆为两根1.8 m 的铝合金管,两个喷杆相距40 cm,下部以两根铝合金横杆连接,可用套筒固定使喷杆完全直立,结构设计简单,易于操作。
在测试过程中,喷杆结构稳定,不易晃动,在不平路面行驶时,喷杆直立稳定,但产生晃动影响喷洒工作[10],如图8 所示。

图8 立式喷杆
本喷药机器人采用锐晨生产的05152 型号泵,如图9 所示,对比于市场上的其他泵,它可以高效、可靠地汲取药液。参数如表3 所示,它具有多种优点,例如能够处理各种黏度的液体,输送精度高且流量稳定,密封性好且维护方便等。这种泵适用于各种应用场景,例如喷药、灌溉、施肥等。通过使用这种泵,温室机器人可以更精确地控制农药的喷洒量,提高种植效率和质量,同时减少农药的使用量和浪费。
表3 05152泵参数表

图9 05152型号泵
如图10 所示的喷药机构管路,利用三通管路,将药液分流,通过两路喷嘴管。三通管路的设计还需要考虑流体动力学性能。在设计时,需要确保流体在通过三通管路时不会出现涡流、流速不均等现象。为了实现这一目标,可以采用计算机流体动力学(CFD)分析等技术进行模拟和优化[11]。三通管路对于提高灌溉效率、减少资源浪费具有重要意义,可满足实际应用中篱架型植物喷洒需求。
图10 喷药机构管路设计图
7 结论
智能喷药机器人通过先进的图像识别技术,能够准确地识别出病虫害。通过对大量图像的学习和分析,机器人能够识别出不同种类、不同程度、不同部位的病虫害,甚至能够预测出病虫害的发展趋势。这种精准识别能力不仅提高了防治效果,也大大减少了药液的浪费和环境污染。除了精准识别病虫害外,智能喷药机器人还具备靶向喷药的能力。通过高精度的喷头和精确的控制程序,机器人能够将药液精确地喷洒到目标区域,既保证了防治效果,又避免了药液对其他区域的污染。此外,机器人还能够根据病虫害的情况和作物的生长阶段,自动调整喷药的量和频率,实现了真正的精准喷药。智能喷药机器人的应用将带来许多其他好处。首先,它提高了防治效率,减少了人工喷药的劳动强度和时间成本。其次,通过精准喷药,机器人降低了药液的使用量,减少了农药对环境的负面影响。最后,智能喷药机器人的应用也提高了农作物的产量和品质,为农民带来了实实在在的收益。
