草莓全程生产机械化技术与装备研究进展
2024-03-08王莎莎
王莎莎
(黑龙江工商学院,黑龙江 哈尔滨 150025)
草莓这种作物对生产环境的要求比较低,在我国很多地区均有种植。我国作为草莓主要的生产国家之一,早在2018 年总产量便已经达到了全球总产量的35.6%[1]。但草莓的生长周期比较长,在生产管理流程方面比较复杂,当前仍以人工作业的方式为主,机械化水平总体比较低,因此,草莓全程生产机械化技术与装备的研发已经成为重点话题。草莓的栽培技术要求以及植物学特征均具有独特性,不同地区的经营规模以及栽培模式均存在较大的差异,导致草莓全程生产机械化技术与装备的特点也存在差异[2]。因此,本文针对草莓种植管理的整个流程,对草莓全程生产机械化技术与装备进行研究,并对其技术和装备的发展动向进行预测分析,从而为草莓全程生产机械化技术与装备的应用和发展提供支持。
1 草莓种植管理模式分析
1.1 平地栽培模式
该模式通常是在平地进行畦栽或行栽,这种模式下,草莓秧苗会附着地面生长,并且产出的草莓果实还会与土壤直接接触,当降雨后或者是用水灌溉后容易出现积水,果实的光照也不够充足,叶片以及果实容易被感染,导致果实非常容易出现灰霉病,影响果实品质[3]。此外,这种栽培模式费工费力,田间管理的难度比较大,所以这种模式当前较少采用。
1.2 高垄栽培模式
这种模式是将栽培行制成垄,然后将草莓秧苗栽培在垄上。这种模式具有良好的透气通风效果,且土壤的保温效果也比较好,田间管理比较方便,能够降低病害发生的可能性,实现高产高质,已成为当前草莓种植的一种主流模式。如果草莓种植的品种不同,则起垄的垄宽、沟宽以及垄高均存在差异,以溧水县、金坛区以及镇江市三个草莓种植基地为例,其草莓种植的垄宽、垄高以及沟宽数据如表1 所示[4]。如果起垄数据存在差异,则草莓全程生产机械化技术与装备的规格也会存在差异,由此可见,草莓的种植模式、种植品种均会对所用的技术和设备产生一定影响。
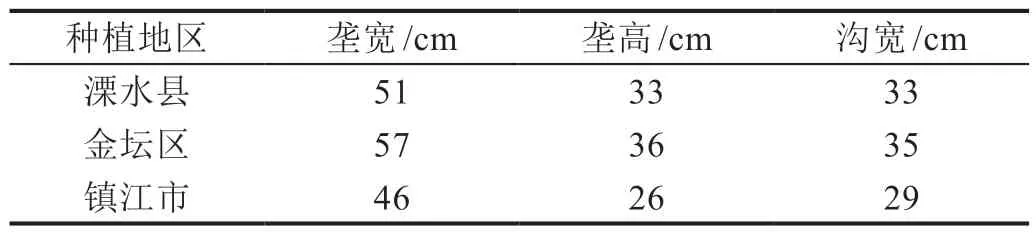
表1 不同地区对应的起垄数据
1.3 高架栽培模式
这种栽培模式主要是在温室大棚中设置一些高架栽培床,确保其宽度和高度一定,在床内均匀摊铺基质,将草莓栽植在摊铺好的高架床上。这种模式便于人工作业,可使劳动强度有效降低,并且对温室的空间进行了充分利用,可有效避免病虫害传播,是当前我国各地区广泛推广的一种栽培技术[5]。此外,高架栽培模式还衍生出多种模式,例如A 字架栽培模式、H架双层栽培模式等等。
2 草莓全程生产机械化技术与装备的应用现状
2.1 耕整机械的应用
现阶段,我国草莓种植使用的温室或塑料大棚宽度一般能够达到6 m 以上,可以使用微耕机开展耕整作业,也可以使用手扶拖拉机来完成耕整,但这些耕整机械并非专门针对草莓种植而研发的,并且在起垄高度以及沟深方面也无法满足草莓种植的实际要求,在开沟起垄方面并不具备良好的稳定性,仍需依靠人工作业的方式完成耕整[6]。目前,市场上已经开始对草莓种植专用的新型起垄机进行推广应用,例如YT8-K30 草莓开沟起垄精整机,其能够实现耕整工作的精细化,并且在实际应用中取得了一定的效果,该设备的技术参数如表2所示。
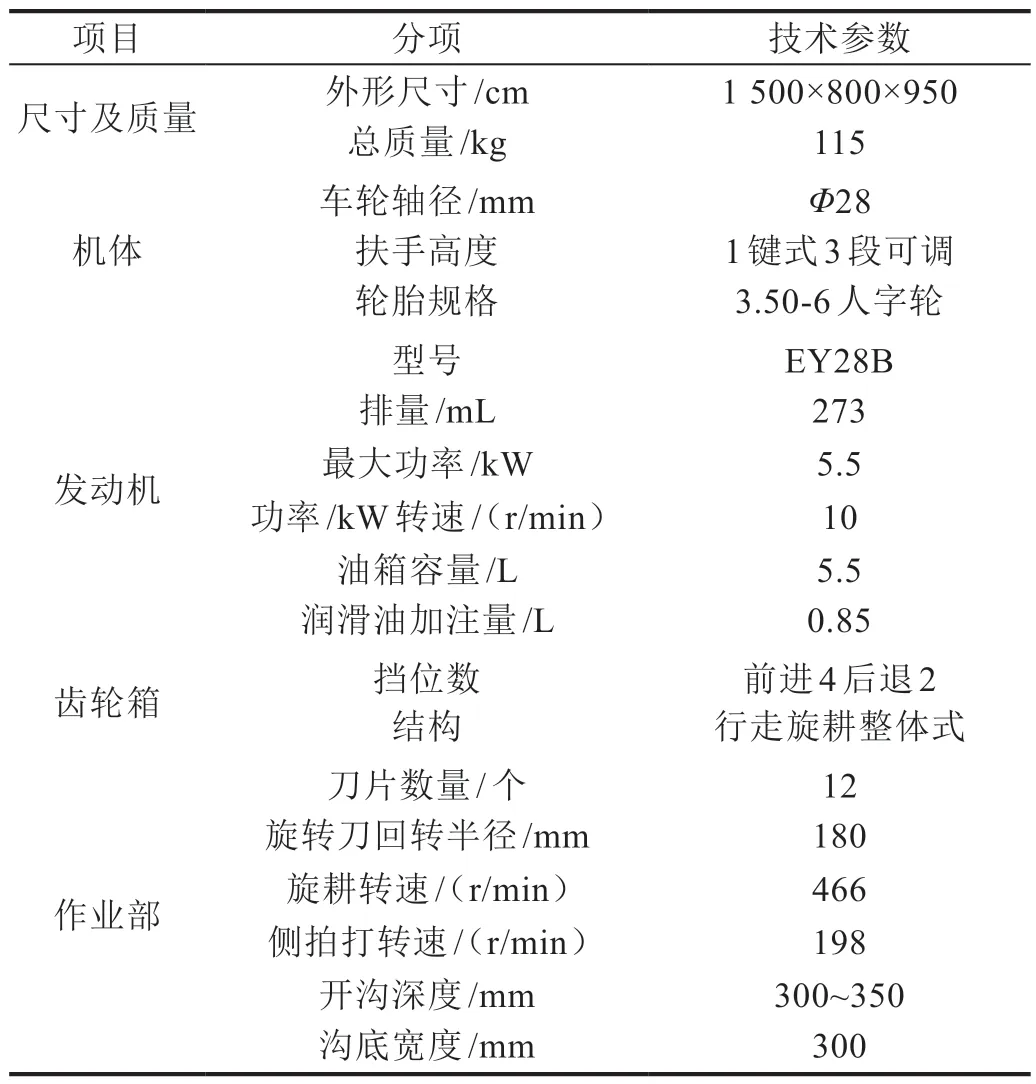
表2 YT8-K30型草莓开沟起垄精整机技术参数
草莓秧苗栽植之前还需要喷洒杀虫剂以及除草剂,并使用黑色塑料薄膜将垄面以及垄沟全面覆盖,使草莓秧苗的根系得以有效发育,并发挥保湿作用,避免病害发生,当前对薄膜的覆盖主要使用开沟、起垄铺膜机,也有部分使用铺膜播种一体机,但适用于高垄草莓种植的小型、专用型铺膜机较为少见。
2.2 移栽机械的应用
我国在移栽机研发方面有着较快的发展速度,现阶段,我国已经研发了适用于油菜、西兰花、薯类等农作物的半自动式秧苗移栽机,并且已经在市场中投入应用。但由于草莓秧苗在移栽时存在弓背朝外的特点,并且很多草莓秧苗属于超大苗,若采用半自动式秧苗移栽机进行移栽容易出现问题[7]。对此,市面上已经启用了小型高架草莓移栽机,该机械设备能够解决超大苗的移栽问题,同时还具有自动换盘、自动导航等先进功能,适用于高架草莓秧苗的移栽,移栽成功率高达95%,并且在行距和株距方面要明显优于人工操作。
2.3 植保机械的应用
草莓栽培管理中容易出现较多的病虫害,例如灰霉病、蚜虫病、白粉病等等,导致草莓的栽培管理难度增加,因而需要在草莓秧苗生长周期内定期施药。随着智能化、信息化技术在农机中的不断应用,针对草莓植保作业,已经研发出了一种智能喷雾机,这种喷雾机自带摄像头,当发现草莓秧苗存在病虫害迹象时,可以实现智能识别,并对出现病虫害迹象的秧苗喷洒药物[8]。在智能喷雾机技术的基础上,我国研发人员又将温室轨道、智能机器人等应用到温室施药方面,从而使施药的稳定性和高效性得以提升。此外,还有研发人员利用气流送药的原理研发了小型雾化威风施药机,该植保机械在草莓植株两行中间位置的正上方设置了喷筒,利用微风和侧倾助力药物喷洒,从而使微小的雾化药物颗粒随着微风均匀地喷洒到植株上,避免植株花蕊受到损伤,但需要将风速控制在7 m/s 左右,侧倾角应该控制在30°之内,药液使用量仅为0.5 L/min,能够以最少的药量获取最显著的植保成效。
2.4 授粉机械的应用
草莓若要结果,必须要经历授粉,当前草莓授粉仍采用蜂群授粉的方式。但是由于一些地区冬季的气温比较低,蜂群授粉易出现停授、漏授等情况,导致草莓授粉的效果受到影响。草莓的花期一般比较短,其花粉量非常少,并且在收集方面难度比较大,如果先将花粉进行收集,然后再采用鼓风喷粉的方式进行授粉,则无法完全满足草莓授粉的需求,并且常用的机械振动授粉方式非常容易对花序产生损伤。随着无人机技术的发展应用,其在草莓授粉方面展现出了巨大优势,未来可以将无人机应用于草莓采粉授粉,从而满足草莓授粉需求。
2.5 采收机械的应用
当前国内草莓采收依然是通过人工提篮的方式来完成的,在采收之后直接将合格的草莓果实就地装入商品包装内,再将包装好的商品直接运输到各地进行销售。在草莓采收方面,机器人已经成为草莓采收的重点研发目标。尤其是在神经网络技术以及模型构建的方法引入到农机改良之后,可以积极使用这些技术方法研发草莓成熟度快速识别采摘机械。还有学者将激光技术以及机器视觉技术应用于草莓采收中,实现了定位采摘。我国农业智能化装备权威机构与中国农业大学等高校联合研发了草莓采摘机器人,该机器人由机械臂、剪叉升降机、末端执行装置等组成,通过远景与近景视觉组合的形式对草莓果实进行定位,之后研发了“采摘童1 号”样机,该采收机器人能够将定位误差控制在4.82 mm 之内,采摘成功率可以达到95%以上[9]。
2.6 转运机械的应用
草莓采收后还需要在田间完成转运操作,对于已经包装好的草莓则需要整箱转运。尤其是一些大规模草莓生产基地,需要开展转运工作,该环节的工作量非常大,如果通过人工转运需要耗费较多的人力资源[10]。目前大型的转运设备均产于国外,例如美国GK 公司便研发了一种用于大型草莓包装箱转运的装置,并且可以通过遥控的方式使该设备在垄沟内行走,能够一次搬运多个草莓包装箱,适合高垄作业。再如,日本使用的My Donkey 机器人不仅能够做到草莓的接运、测定草莓的产量,还能够实现高垄自动行走,且具有防撞功能。虽然我国在该领域的研发还处于起步阶段,但也已经开始研发智能机器人用于草莓果实包装箱的转运。
3 草莓全程生产机械化技术与装备的发展展望
3.1 一机多能集成化
草莓的种植周期一般在6 个月以上,并且还具有多茬管理的生产特点,尤其是对于一些经营规模比较小的生产基地,应该在高架或者是高垄的基础上保证机械设备底盘的通用性,并且还要实现接口统一,将各种作业模块开发出来,使其可以更换挂接,实现一机多能,从而满足草莓种植周期内多次更换部件的生产需要;也可以将各种功能的部件集成一体,使部件更换的频率降低,便于作业。
3.2 轻便智能
由于温室大棚的内部空间比较狭小,并且高垄、高架的通道比较狭窄,在使用小型作业机械装备进行作业时,很难通过以往的方式驾驶机械设备,可以依照当前技术的成熟度并结合草莓实际生产需要,通过在垄上以及架间开展无人机操作,在一端进行遥控掉头,可以进行补充药物、秧苗、花粉等操作,再加入较少的人工操作,从而实现机械设备的全程作业,降低了人工劳动强度,实现了智能化作业。
3.3 绿色环保
由于很多地区采用温室大棚栽植草莓,属于半封闭环境,且人们对草莓种植的需求日渐提升,绿色环保种植已成为当前草莓种植的主要要求。因此,应该合理使用当前的栽培设施,避免大温差等环境问题。在使用机械进行补药时,还要注意用药量,避免过度用药造成的环境污染问题。此外,草莓全程生产机械化技术还要向易控、零尾气排放、全面电动化等方向发展,从而实现草莓种植全程的绿色环保。
3.4 小型低成本
国内当前的草莓种植多是以塑料大棚、温室等环境为主,这种环境的入口比较窄,并且棚肩存在高低差,垄行之间的距离也比较小,在机械化作业方面适合小型机械作业、自动化作业,可以提高草莓生产全过程的效率,降低生产成本,满足当前散户经营的实际需要。此外,信息化、智能化技术手段的应用也可以为草莓种植生产的小型化、低成本化发展提供有力支持。
4 结语
综上所述,当前我国草莓全程生产机械化水平已经有所提高,并且已经将智能化技术、信息技术应用于草莓生产机械技术与装备之中,提升了草莓生产质效,在智慧农业的引导下,草莓全程生产机械化技术与装备将持续向小型轻量化、绿色化、智能化、集成化等方向发展,使草莓种植生产得到有效的技术支撑。
