基于匝道合流数据的自动驾驶汽车安全性测试评价方法
2024-03-08李文礼李中峰
李文礼,李 超,李中峰,易 帆,李 安
(1.重庆理工大学 汽车零部件先进制造技术教育部重点实验室,重庆 400054;2.重庆长安汽车股份有限公司,重庆 400020)
0 引 言
自动驾驶汽车仿真测试需对场景进行精准的形式化描述[1],学者们对测试场景和评价方法进行了大量研究。
在测试场景生成方面,主要包括组合方法、随机采样法、聚类、优化搜索、重要性采样及深度强化学习等。王荣等[2]基于标准法规,通过挑选与组合基本场景要素,生成多维度测试内容,并组合测试环境得到测试场景,但不依据数据直接对场景进行组合,生成的测试场景与实际出入较大;刘康[3]基于PICT 对换道参数进行组合,得到换道逻辑场景参数,但该方法可能得到大量不合理、同质化场景;M.SHAHIN等[4]通过聚类算法将十字路口交通事故数据聚类,得到非严重与严重事故两类测试场景;C.E.TUNCALI等[5]定义TTC与相对速度之和这一目标函数,优化搜索模型得到目标函数值,但仅用TTC等指标不能完全反映真实场景的高维复杂特性;周文帅等[6]在蒙特卡洛随机采样的基础上,通过描述模型中的参数分布进行重要性采样,在随机采样的基础上有效提高了高风险场景的覆盖度,但采样过程往往无法创造新场景;李江坤等[7]提出了基于场景动力学和深度强化学习的边缘场景生成方法,在场景的覆盖度、可重复测试等方面具有良好性能,但易生成同质化场景,无法提高场景多样性。
在评价方面,目前主流的评价集结模型包括模糊综合评价、灰色关联法、逼近理想解排序法(TOPSIS)、加权算术评价法、耦合聚类法及反向传播神经网络法等。王成壮[8]通过层次分析法(AHP)与专家打分的模糊综合分析相结合,对控制算法进行了安全性评价,但主观性较强;魏子茹等[9]利用CRITIC权重法与灰色关联度模型相结合评价场景;戴剑勇等[10]利用PPR计算网络中心指标权重,结合TOPSIS方法对高速公路交通事故风险因素重要度进行了排序;ZHAO Yanan等[11]将属性指标设定为车辆完成任务的成本函数,将熵权法与加权平均算法相结合,对车辆的任务完成度进行评价;朱冰等[12]通过耦合聚类得到场景危险率参数来评价自动驾驶的安全性,但缺乏通用性;陈君毅等[13]利用客观指标作为输入,主观评价结果作为输出建立了BP神经网络评价模型,但模型非公式化结果,不同对象评价结果的差异缘由无法得知,且主观性较强。
综上,笔者以研究自动驾驶汽车在匝道汇入过程中的安全性为目标,通过采集匝道车辆汇入行驶数据,在固定功能场景的前提下筛选出匝道汇入交互逻辑动态场景要素,利用聚类得到两类典型测试场景用于自动驾驶汽车仿真中行驶参数设置,以模拟真实道路行驶状态;同时,提出了一种客观评价模型,将灰色关联度模型与核密度估计模型相融合,通过拟合估计汇入车辆真实指标数据,确定匝道汇入安全性指标最优阈值。该阈值在灰色关联评价模型中取代传统的专家意见,能更准确地评价仿真车辆的匝道汇入安全性;最后利用模糊综合分析主观评价模型验证此模型的准确性及有效性。
1 数据采集
数据采集设备为“DJI Mini 2”无人机,工作频率为5.725~5.850 GHz,录像分辨率为4k/24 fps,单次飞行时间为30 min,视频格式为MP4。采集地点为重庆华陶立交匝道,拍摄区域覆盖合流区,如图1。

图1 无人机采集示意Fig.1 UAV acquisition diagram
采集时间避开高峰段,分布在10:00—17:00,共采集7次,将采集的视频通过软件进行自动标注,标注范围为横坐标位于25~325 m,交互区域为100~260 m。整理得到507条有效汇入轨迹数据,累计2.592×105帧。原始数据存在较大波动,为便于研究对原始数据进行3-σ原则异常值剔除和Savitzky-Golay滤波。由此得到平滑后的数据,具体包括:追踪编号ID、时间t、位置坐标(x,y)、前车编号ID、车道ID等如表1。

表1 部分驾驶数据Table 1 Partial driving data
2 典型匝道汇入测试场景提取
在测试场景生成中,为保证环境信息与道路信息的不变,同时引入自车及前车的速度、自车交互区域(交互区域)、汇入车道及驶离车道等逻辑场景要素进行场景聚类。参照SHRP2[14]筛选危险工况的方法,从采集数据中得到汇入工况片段289例。
2.1 场景要素统计
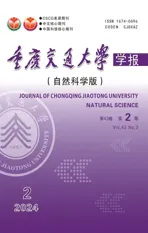
针对得到的289例有效匝道汇入工况,因类例数较少,选择系统聚类生成测试场景。笔者的聚类要素中的环境信息与道路信息已固定,只聚类自车信息、周车信息、交通信息等。因碰撞时间(time-to-collision,tTTC)等指标为评价指标,为不影响最优阈值提取,统计时不考虑在内。最终得到12类汇入(场景)要素,用编码1~5代替各要素变量,如表2。
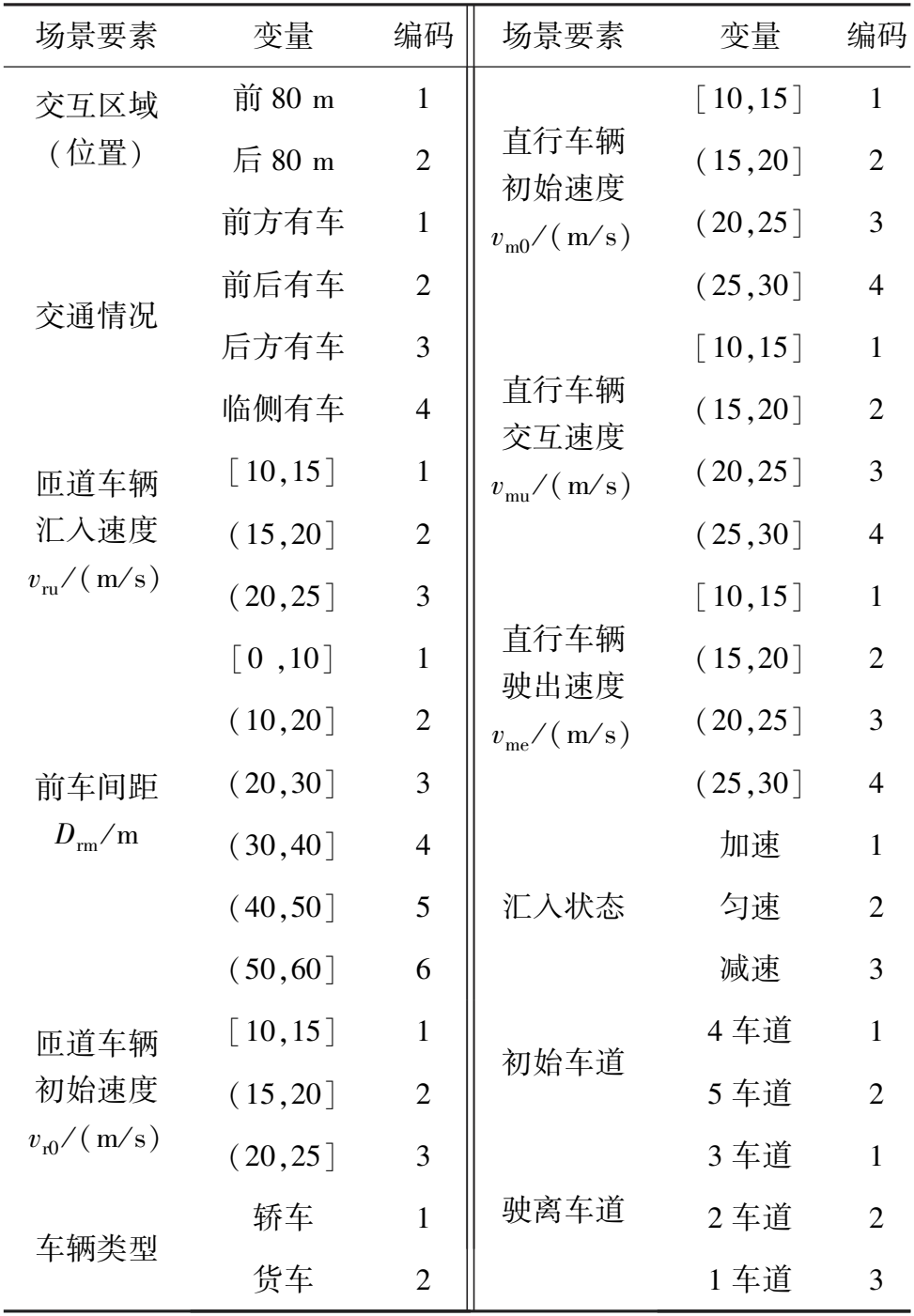
表2 各要素变量数量表Table 2 Quantity table of each factor variable
2.2 聚类计算步骤
步骤1用绝对值距离计算多名义尺度、二值名义尺度的变量间距,并对连续变量(速度、距离)做归一化处理,保证多名义尺度、二值名义尺度及连续变量的变量间距都为1。
步骤2计算样本间距离选择闵可夫斯基距离,如式(1):
(1)
式中:xij为样本i的j个数据;xi′j为将xij标准化处理以后的标准值;p为样本数量;q为参量,q=1时,dii′(q)为绝对值距离,m。
步骤3计算类之间的距离通常使用类平均法,如式(2):
(2)

聚类时应当排除某一要素中单个变量占95%以上的场景要素[15],如车辆类型中轿车占98%则直接作为聚类结果,聚类过程形成的树状图见图2,图中纵轴表样本间的距离(无纲量),横轴表示样本编号。
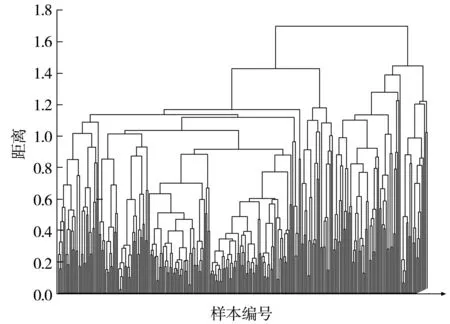
图2 各案例聚类Fig.2 Cluster diagram of each case
不一致系数可以用来确定分类个数,计算发现最后一次不一致系数增幅最大,故选择聚类个数为2类。将聚类结果中的名义变量在每类中的占比与此类变量在总体变量中所占比例比较,比例较高的作为聚类结果,连续变量取当前类所有值的平均值,最终得到典型的匝道汇入场景,如表3。将其结果用于后文自动驾驶车辆测试场景的搭建和车辆测试参数的设定。
3 自动驾驶汽车安全性评价体系
确定测试场景及车辆测试参数后,需建立自动驾驶汽车安全性评价体系,对其匝道汇入过程的安全性进行评价。其原理为通过评价目标或对象的性能参数和实际表现等,建立一维或多维指标体系,通过多种赋权方法对指标体系赋权,并利用定性或者定量评价模型划分等级或得出精确数值,来反映评价目标或对象的性能优劣。

表3 聚类分析典型匝道汇入场景Table 3 Cluster analysis of typical ramp merging scenarios
基于此,笔者利用重要性分析得到汇入过程与驾驶安全相关性高的指标体系,通过AHP和CRITIC主客观结合赋权法对指标体系进行赋权,结合核密度估计模型与灰色关联理论模型,得到基于驾驶数据驱动的客观评价模型。
3.1 评价指标体系
评价指标体系指通过车辆的行驶参数得到不同指标并用来评价车辆不同性能。在筛选过程中,尽可能选择信息量大、与测试场景关联性高的指标,这样可以更准确有效地反映车辆在测试场景中性能,具体表现为车辆决策后发生改变的量化数据,如碰撞时间(tTTC)、后侵入时间(tPET)及车头时距(tTHW)等。同时匝道汇入过程中,过高或过低的通过性都容易引起碰撞事故,故笔者以汇入安全性为目标,以安全性指标和通过性指标为主,将自动驾驶汽车匝道汇入安全性评价作为目标层,将行驶安全性、通过高效性作为总指标层,并通过重要性分析得到指标层的具体指标,如图3。

图3 评价指标体系Fig.3 Evaluation index system
利用客观CRITIC法确定对应指标权重,用层次分析法(AHP)确定总指标层权重。使用这样的赋权方法一方面能避免赋权的主观性,另一方面又能考虑会对指标权重产生影响的数据波动性与数据间相关关系,使所求指标权重更加准确客观。
3.2 建立评价模型
灰色系统指人们通过信息不能充分认知的的系统,自动驾驶车辆的评价指标繁杂,无法面面俱到,与灰色系统十分类似,故灰色关联理论被广泛应用在车辆的评价之中。其结果由事物间的关联程度或影响程度——灰色关联度来决定,当输入序列曲线与参考序列曲线相似程度越近时,其灰色关联度也就越大,反之则越小,具体计算步骤如下:
步骤1确定参考序列R0,即指标最优阈值,由核密度估计模型给出。
步骤2确定评价指标的比较序列矩阵,假设同一辆车在同一场景下进行了m次实验,共有n个评价指标,比较序列矩阵为(Rij)m×n。Rij表示在i次实验时输出的指标数据j。
步骤3当存在R1j与R2j分别在最优值两端时,存在正向指标R2j>R1j时其关联系数反而小的情况,故因将比较序列正向化,保证所有值在最优值的一侧,负向指标亦如此,如式(3)、式(4):
(3)
(4)

步骤4使用均值法对各指标值进行无量纲处理,如式(5)、式(6):
(5)
(6)

步骤5计算关联系数ξi(j),如式(7):
ξi(j)=[miniminj|X0(j)-Xi(j)|+ρ·maximaxj|X0(j)-Xi(j)|]/[|X0(j)-Xi(j)|+ρ·maximaxj|X0(j)-Xi(j)|]
(7)
式中:ρ为分辨系数,一般取0.5。
步骤6计算总指标得分,根据笔者构建的评价体系为多层评价体系,将关联度与指标层权重wj和总指标层进行累计加权平均,得到目标层得分S,如式(8):
(8)
3.3 最优阈值的确定
灰色关联评价模型结果的准确性与最优阈值(参考序列)高度相关,但由于最优阈值往往由专家给出,与具体场景值的契合度较小且主观性较强。核密度估计模型为非参数估计模型,不需要有关数据的先验基础知识,它以数据特征为依据,能有效描述复杂指标的数据分布情况。笔者引入非参数估计模型中的核密度估计模型(KDE),对采集数据中的指标数据进行拟合估计,得到最优阈值以提高灰色关联度模型的客观性。带宽是KDE模型的核心,其值决定了核密度估计模型的拟合质量,通过Silverman经验法和最小化AMISE法则得到平均积分平方误差最小化的最优带宽,其中核函数为高斯核函数,如式(9):
(9)

以聚类结果的目标车工况数据作为核密度估计模型的输入,利用最优宽带的核密度估计模型对各评价指标在不同场景下时序值进行密度拟合,其核密度估计如图4(a)~图4(f)。核密度最大处表示数据热点,并作为指标的最优阈值[16]。如出现偏峰,取左右侧各85%分位值所在区间的平均值为最优阈值,得到的各指标最优阈值结果见表4。

图4 不同场景下各指标核密度估计Fig.4 Kernel density estimation of each indicator in different scenarios

表4 核密度估计结果Table 4 Kernel density estimation results
4 仿真测试与结果分析
考虑实车测试的成本高、实验重复性差,笔者选用PreScan和MATLAB的联合仿真搭建两类典型匝道合流场景。为了达到接近真实测试目的,根据聚类结果选取轿车模型,并加载车辆动力学模型、驾驶员模型及雷达传感器模型,保证车辆模型可靠性。利用TIFF格式地图用RoadRunner进行1∶1精确地图复现,设置路面附着系数为0.7,天气晴朗,可视度高,无其它因素干扰等,保证实际道路信息与仿真场景信息的一致性。根据聚类结果设置车辆相关行驶参数,保证交互中干扰车运动状态的统一性。最后对仿真被测车辆加入两种不同的自动驾驶控制算法来验证评价模型的有效性。
4.1 仿真场景测试
按聚类结果设置仿真车辆参数,直行车辆速度包含初始车速、交互车速及最终车速,起始位置由前车间距得到,保持第3车道行驶。交互车速位于交互区域,交互区域由每类车辆汇入横坐标平均值得到,场景1为x=135.73 m,场景2为x=207.12 m。场景2的后车间距为35.13 m,相关车速均由后车车速平均值得到,保证仿真中的所有主路车行驶状态符合实际驾驶规律。汇入车辆仅按照聚类结果设置初始车速、汇入车道。车辆行驶区间起始位置为x=25 m,结束位置为x=325 m,与采集数据一致。
观察自动驾驶算法在汇入过程的交互行为,仿真片段如图5。

图5 聚类仿真片段Fig.5 Clustering simulation fragment
场景1仿真片段中,目标车从第4车道驶入匝道,主车道前方有车后方无车,算法在导流线一结束便开始汇入动作,但由于汇入车的减速运动导致后续速度下降较快,场景2仿真片段中目标车从第5车道驶入匝道,主车道前后方均有车,算法在第4、5车道即将消失的末端才开始汇入动作,两车在测试过程中都未发生碰撞,且能在较短时间内通过雷达识别到前方车辆,并通过算法进行判断是否制动。
通过仿真输出的测试数据计算得到各指标的值,其中计算方法与驾驶数据一致,如表5。
表5 场景仿真结果Table 5 Scenario simulation results
观察仿真测试结果,在测试场景方面,车辆一和车辆二的行驶路径与聚类结果中车辆的关键途径点一致。场景1中,汇入车辆左侧前方有车后方无车,汇入时间较小,但由于直行车的减速运动,汇入安全性较低,通行效率更高。场景2中,汇入车辆左侧前方有车后方有车,造成汇入时间较大,通过高效性较差。在安全汇入不考虑后车追尾情况下,由于场景2汇入过程存在判断延迟,其整体安全性反而更高。
在不同车辆方面,车辆一的tTTC、tPET及tTHW均小于采集数据,安全性较差,说明在车速较高距离较近时未进行大幅度制动措施。车辆二的tTTC在两个场景中皆为4 s以上,tTTC也皆大于车辆一,正向碰撞安全性较车辆一更好,tPET与采集数据接近,侧向碰撞安全性表现优秀。但通过高效性方面车辆一的效率好于车辆二,同时也反映出车辆一整体偏向激进型,车辆二偏向保守性,整体来说,两车都符合安全性与高效性要求,且符合采集数据的分布特点。
4.2 测试评价结果
以仿真输出的值为被测对象,参照文献[9]中层次分析法及CRITIC法的计算得到总指标层和各指标的权重,如表6。
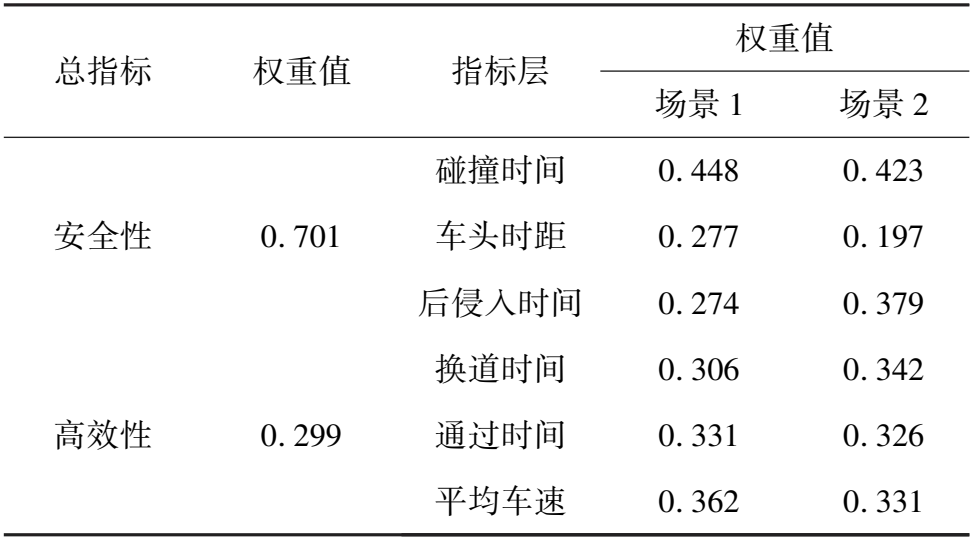
表6 车辆指标的权重Table 6 Weight of vehicle indicators
利用基于核密度估计的灰色关联理论评价模型,以相同场景不同车辆为关联矩阵,并对正负向指标按式(3)~式(8)计算得到各指标分值及车辆综合得分,如表7。
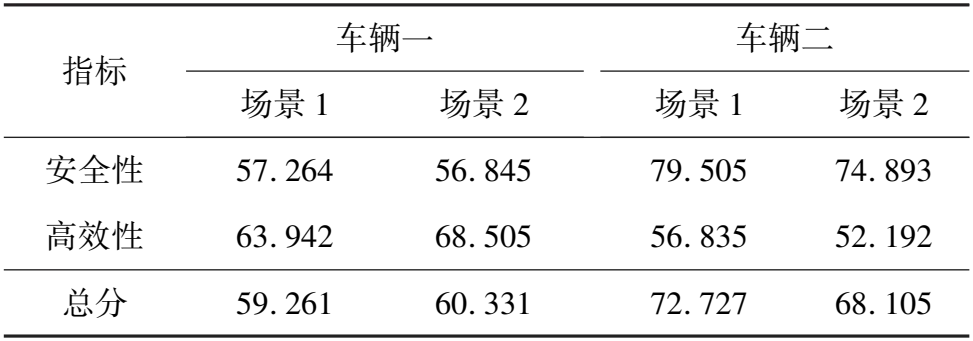
表7 车辆综合得分及总指标得分Table 7 Vehicle comprehensive score and total index score
为验证评价模型的有效性,利用模糊综合分析评价模型对比验证,通过邀请有驾驶经验的驾驶员共50人,观察仿真车辆数据并按照评价标准对两个场景车辆表现进行打分,统计出各分数等级的人数,考虑成本,仅对车辆一场景1进行评分,如表8。

表8 场景1中车辆一专家评分统计Table 8 Statistical table of expert rating for vehicle 1 in scenario 1
参照文献[9]计算得到模糊综合评价结果。其与灰色关联理论结果比较,如表9。

表9 不同模型评价结果Table 9 Evaluation results of different models
4.3 实验结果与评价结果分析
观察评价结果,从相同模型下不同车辆评价结果、相同车辆下不同模型评价结果两方面分析,来验证基于核密度估计的灰色关联理论评价模型可靠性,得到以下结论:
1)分析对比表5仿真数据与表7灰色关联模型结果可知:在安全性方面,两个场景中车辆一的tTTC、tPET及tTHW皆明显低于车辆二,正向碰撞和侧向碰撞安全都较差;在灰色关联模型量化评价结果中,车辆二在场景1的安全性得分高于车辆一27.97%,且场景2的安全性高24.10%,与测试数据量化分析结果规律一致。在高效性方面,场景中的两车在通过时间、换道时间差异极大,灰色关联模型中场景2两车差异达到23.81%,场景1仅差11.11%,说明基于核密度估计的灰色关联模型评价结果与测试数据量化分析结果的规律一致性较高,且评价模型的评分波动区间也符合数据分布的特点,能准确评价车辆的表现。
2)分析对比不同模型评价结果的一致性可知:车辆一场景1中两模型安全方面得分一致性达91.47%,高效方面得分一致性达89.49%,综合分一致性达98.01%。其中综合性的得分一致性明显高于安全性和高效性,主要是由于层次分析法得到的权重所导致。总指标层的得分一致性在90%左右,说明指标层权重法较合理。总体来说基于核密度估计的客观灰色关联理论模型与主观评价模糊综合分析法具有较高一致性。
5 结 论
针对高速匝道汇入场景,利用采集的驾驶数据求出安全性评价指标的客观值,提出基于核密度估计的灰色关联理论模型,其主要结论如下:
1)考虑了匝道汇入车辆的各行驶要素,利用聚类分析实现测试场景生成及测试数据生成,避免了测试用例在场景中的行驶参数由主观设定;在后续的仿真测试中,搭建了精度较高的典型高速匝道汇入测试场景,保证了测试仿真与匝道汇入场景的一致性,进一步提高了测试评价结果的准确度。
2)在评价模型中考虑到了主观评价对模型结果的影响,以核密度估计得到的最优阈值作为评价模型的输入,代替了专家意见值,客观模型与主观模型结果相似度为98.01%,评价结果较准确、客观性强,适用于自动驾驶车辆仿真测试中的安全性评价。