中性浮力水下机械臂关键技术研究
2024-03-07韩亮亮晁建刚王卫军张崇峰
杨 健, 韩亮亮, 晁建刚, 浣 上, 王卫军, 张崇峰
(1.上海宇航系统工程研究所, 上海 201108; 2.上海市空间飞行器机构重点实验室, 上海 201108;3.中国航天员科研训练中心, 北京 100094)
1 引言
空间站属于中长期飞行的载人航天器,需要航天员出舱进行在轨维修和故障排除[1]。 机械臂系统作为中国空间站建造、运营、维修及拓展等过程中不可或缺的关键设备,用于协同航天员完成舱外建造、维护维修,以及舱外载荷操作任务[2⁃3]。
航天员在失重环境下作业方法和技巧会发生改变,为模拟微重力环境下的效应,航天员需要在水下环境进行出舱任务训练[4⁃6]。 为使站在机械臂末端的航天员能在地面训练中感受到与在轨状态一致的运动与操作感受,出舱活动水下试验亟需一台在作业模式、操作体验等各方面最大限度模拟真实机械臂产品的水下机械臂,用以提高航天员在模拟失重环境下进行出舱活动试验和训练的效果。
本文结合任务需求概述水下机械臂的总体方案,分析水下机械臂与空间机械臂相比存在的技术问题,并对关键技术进行攻关,最后进行了水下连续试验验证。
2 水下机械臂概述
为满足航天飞机出舱活动的训练需求,NASA 在约翰逊航天中心建造了失重环境模拟设备(Weightless Environment Training Facility,WETF),可以容纳航天飞机全尺寸模型,用于水下航天员太空出舱活动训练。 为满足国际空间站的出舱活动训练,NASA 建造了中性浮力实验室(Neutral Buoyancy Laboratory, NBL)用于配合航天员模拟失重训练[7⁃8]。 NBL 可以容纳国际空间站的几个舱段模型,并配置了尺寸和构型与空间站机械臂一致的水下机械臂,如图1 所示。 水下机械臂安装在独立的基座上,关节改为水压驱动,运动控制在地面的控制室内完成。
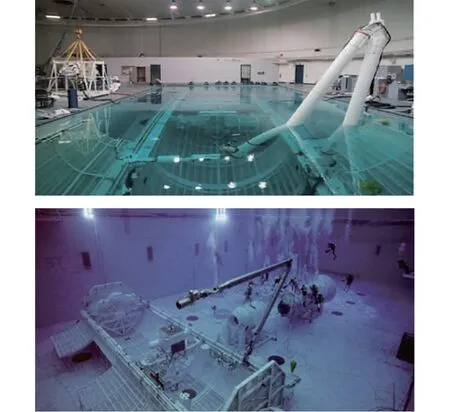
图1 NASA 的水下机械臂[7⁃8]Fig.1 Underwater Manipulator in NASA[7⁃8]
中国空间站航天员通过脚限位器固定于机械臂末端,在机械臂的支持下进行大范围转移完成既定任务。 早期开展机械臂水下试验,使用的是一套由潜水员手动驱动的简易水下机构,只能为航天员提供定点支持功能。 由于无法提供转运功能,航天员须离开简易机构,在潜水员的辅助下游到新作业点,这与在轨实际情况相差甚远,航天员无法体会在失重状态下跟随多自由度机械臂末端运动的感受,训练效果不佳。 此外,因为航天员反复上下脚限位器、潜水员挪动机构位置等导致训练过程不连贯、训练效率低,已无法满足日趋复杂的空间站出舱任务对水下试验和训练的需求。
3 水下机械臂的总体方案
出舱活动水下试验对水下机械臂的任务需求主要包括:
1)航天员固定在水下机械臂末端,由操作员操作手柄或输入坐标位置,将航天员运送至指定位置,过程中航天员体验机械臂的末端运动。
2)试验过程中根据航天员的要求调整机械臂末端姿态,验证作业点位置和作业姿态设计的合理性。
3)水下机械臂锁定位置,支持航天员开展舱外作业的训练任务。
水下机械臂主要技术指标要求见表1。
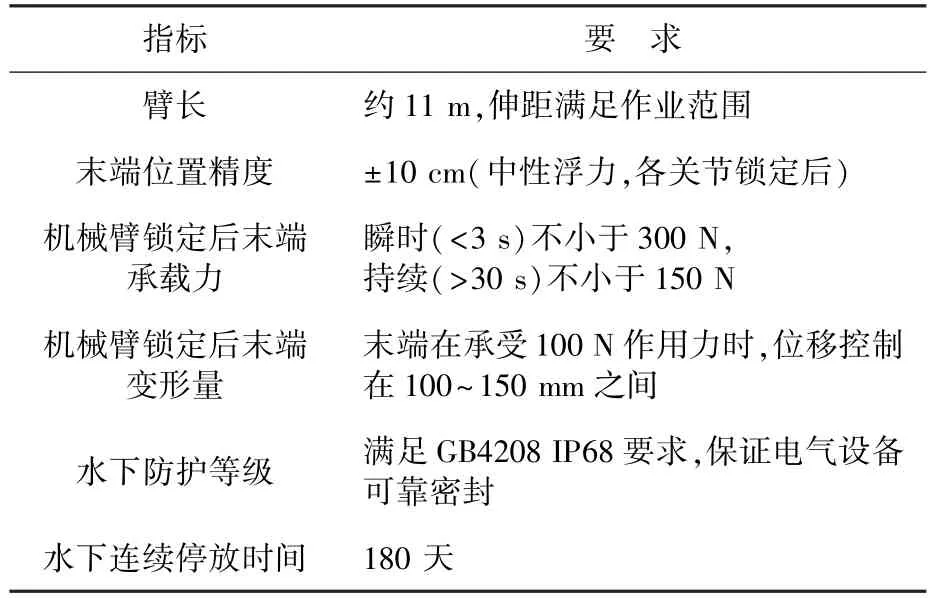
表1 水下机械臂技术指标Table 1 Underwater Manipulator Indicators
水下机械臂总体方案如图2 所示。 水下机械臂通过水下基座等固定安装在水池底部,岸上配置人机交互控制系统和控制与供配电系统,为其提供电源、指令、操作控制等。
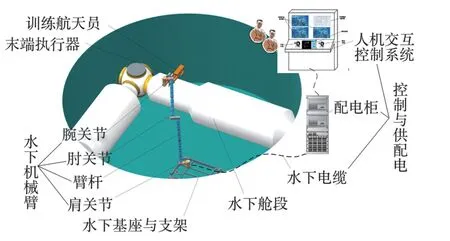
图2 水下机械臂方案示意图Fig.2 Scheme of underwater manipulator
空间站机械臂采用了7 自由度冗余机械臂方案,主要由7 个关节、2 个末端执行器、2 个臂杆、1 个中央控制器以及1 套视觉相机系统组成。 所有关节为转动关节,关节的配置采用肩3+肘1+腕3 方案,为便于机械臂的在轨维修和更换,关节采用模块化设计,其结构形式完全相同。 同时配备3 台视觉相机,肩部、肘部、腕部各1 台,肩部和腕部相机实现目标的识别和位姿测量,肘部相机实现视频监视功能[3]。
按照水下机械臂在操作能力和工作空间与空间站机械臂系统真实产品相当的设计思想,水下机械臂设计为6 个自由度,采用肩2+肘1+腕3 配置,如图3 所示。 该构型与空间站机械臂锁定肩俯仰关节的构型一致,因此6 个自由度的构型可以满足模拟空间站机械臂系统真实状态的任务要求。 为准确反映空间站机械臂末端空间包络与舱体的相对位置关系,腕部关节的装配关系和尺寸参数与真实产品完全一致。
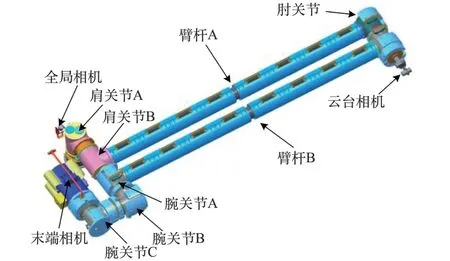
图3 水下机械臂构型Fig.3 Configuration of underwater manipulator
驱动关节是水下机械臂运动的核心部件,主要由电机传动组件、谐波减速器、关节位置传感器、应急驱动组件、动密封组件、电气控制组件等组成,如图4 所示。

图4 关节组成示意图Fig.4 Configuration of joint
4 水下机械臂关键技术
针对前期试验出现的单点吊挂浮力块干扰大、水槽环境中金属材料易腐蚀等问题,针对水下机械臂特殊的任务和功能要求,水下机械臂与空间机械臂相比存在以下技术问题:
1)水作为良好的导电介质,对于采用电驱动的机械臂,要解决水下密封问题;
2)水下机械臂需要通过浮力材料施加多个力来尽可能实现力大小和作用点的平衡,且需将浮力块与机械臂关节赋形设计,以减少对机械臂运动的干扰;
3)水下机械臂大量使用金属材料,在水环境介质的作用下会产生多种腐蚀现象,为保证其使用寿命需加以防范。
4.1 水下密封技术
水下机械臂包含了关节等回转运动的部组件,并且在关节内部还有电机、旋转编码器、关节控制器等电子元器件,关节的密封性直接决定了水下机械臂是否能够可靠地开展航天员水下训练活动。
密封按照其工作状态的不同,可以分为静密封和动密封两大类。 静密封是被密封部位的2 个耦合件之间不存在相对运动的密封形式。 而被密封部位的2 个耦合件之间具有相对运动的密封形式统称为动密封。
O 形圈是最常用的、最简单的一种静密封元件,其基本工作原理是依靠密封件发生弹性变形,在密封解除面上造成接触压力,当此压力大于被密封介质的内压时则不发生泄漏。
泛塞是一种由非金属夹套及弹簧组合的压力辅助密封装置,属于动密封元件,在汽车、石油、化工等领域广泛应用。 密封夹套由高性能非金属聚合材料经精密车削成U 型外壳,泛塞安装在密封沟槽内,弹簧将夹套唇边紧贴密封沟槽,形成初始密封力,介质压力提供额外的密封力。
水下机械臂工作最大水深约为10 m,压力约为0.1 M Pa,试验期间水温控制在28 ~30 ℃,水质较为干净,有利于O 形圈和泛塞的使用。 水下机械臂以关节部件作为基本单元进行密封,采用多重冗余手段进行防护。 第一级:机械连接界面采用O 型圈静密封,旋转界面采用旋转泛塞动密封(各2 层),避免在0.1 MPa 压力下大量水汽进入关节内部;第二级:旋转界面若有少量的水汽进入,关节内部谐波减速器轴端密封也具有较好的密封效果;第三级:关节内部元器件采用高等级防水产品,即使有水汽进入关节内部,电气元件也可以正常工作。
密封方案设计如图5 所示。 通过动密封和静密封的共同作用,形成了相对独立的密封腔和过线缆通道。 其中,动密封主要包括泛塞密封组件,静密封主要包括以O 形圈为主的外部静密封和以胶为主的内部静密封。 密封组件实物如图6所示。
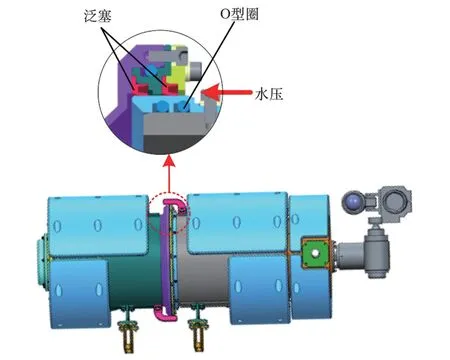
图5 密封组件示意图Fig.5 Sealing components
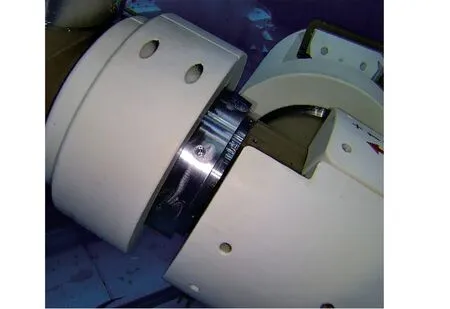
图6 密封组件实物图Fig.6 Physical sealing components
4.2 中性浮力配平技术
根据阿基米德原理,部分或全部浸入于静止流体中的物体,浮力大小等于物体所排开的这部分流体所受到的重力,浮力作用点在物体排开的这部分流体原来的重心处。 一般来说,物体所受重力与浮力大小不同,物体的重心与浮心也不重合,物体会在浮力的作用下绕其质心转动,直到浮心位于重心的正上方,达到一个暂时的稳定位置[9]。 当重心与浮心重合时,物体在液体中任何位置都是平衡和稳定的,物体的这种状态称为随遇平衡状态,也称为中性浮力状态[10]。
水下机械臂是一个6 自由度构型可变的系统,在机械臂运行过程中重心始终处于变化状态,但是具体到某一部件(如关节、臂杆),其重心基本不会发生变化。 因此为了在水下环境中更真实地模拟机械臂的失重状态,需要将机械臂各主要部件分开进行考虑,通过各部件的中性浮力配平来实现整个机械臂的力大小和作用点的平衡,各部件的重力与浮力关系如图7 所示。
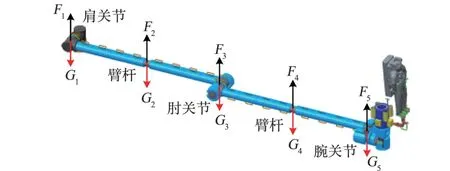
图7 水下机械臂的重力与浮力示意图Fig.7 Gravity and buoyancy of underwater manipulator
中性浮力配平主要包括浮力材料选取、浮力配平仿真计算、浮力块结构设计等环节。
泡沫浮力材料是一种由低密度调节剂填充到高强度树脂中复合而成的聚合物基固体材料,具有密度低(0.2 ~0.7 g/cm)、吸水率低(不大于5%)、机械强度高(压缩强度1 ~100 MPa)、耐腐蚀、可进行二次机械加工等特点。
以计算确定关节的初始质心和浮心作为基础,根据关节外壳初步设计浮力块的形状、结构和布局,再计算增加浮力块后关节的质心和浮心,通过对浮力块形状、大小、布局的迭代设计,直到关节的重力和浮力相抵消且浮心与重心重合。
浮力块内侧根据关节外壳结构进行赋形设计,外轮廓保证为圆柱形,避免影响机械臂的运动空间,如图8 所示。

图8 浮力配平后的关节实物Fig.8 Physical buoyancy balancing joint
4.3 防腐蚀技术
水下机械臂使用大量的金属材料,在中性浮力水槽中长期浸泡容易产生腐蚀问题。 根据周双珍等[11]的研究结果,中性浮力水槽中常发生的腐蚀现象主要包括:①2 种不同金属接触的边线发生电偶腐蚀;②在金属表面缺陷处发生点蚀;③在金属与金属、金属与非金属连接缝隙处发生缝隙腐蚀。
水下机械臂既需要尽可能模拟真实产品的结构外形和功能,又要达到中性浮力配平的状态,接口较复杂,形状不规整;零件的强度、刚度要足够高,但又要避免太重而无法配平;还要考虑到试验人员的安全和舒适性。 鉴于以上特点,水下机械臂的防腐蚀防护设计是一项复杂的综合工作,包括原材料选择、结构设计、工艺等方面。
钛及钛合金在大气和水溶液中很容易形成保护性极好的氧化膜,使其出现钝化现象。 同时,钛的钝化膜又具有非常好的自愈性,当其钝化膜遭到破坏时,能够迅速修复,弥合形成新的保护膜。钛合金在无机金属氯化物中没有明显的点腐蚀和应力腐蚀开裂,无晶间腐蚀、点蚀、脱成分腐蚀等危害较大的局部腐蚀敏感性[12]。 水下机械臂关节壳体、臂杆等部分直接与水接触,作为主要的承力结构件对强度、刚度、重量均有较高要求,宜采用钛合金材料,水下机械臂钛合金关节外壳如图9 所示。

图9 钛合金关节外壳Fig.9 Joint shell made by titanium alloy
紧固件材料选用双相不锈钢SAF2507,由于SAF2507 铬和钼的含量都很高,在含氯环境中,具有很高的耐腐蚀性能,同时还有良好的钝化能力和耐微生物腐蚀性能。 对于水下基座、关节内部零件等可以选择316 L 不锈钢或5A06 防锈铝合金等材料。
水下机械臂采用合理的加工工艺和装配工艺对于其防腐蚀性能也至关重要。 关节壳体、臂杆等需要焊接的钛合金零件可采用等离子弧焊。 等离子弧焊能量集中,焊接穿透力强,可不填焊丝一次焊成,且易于保证均匀的背面焊透。 水下机械臂结构与结构之间、紧固件与安装孔之间容易积存液体,因此总装时要在贴合的整个表面按照工艺要求涂上密封胶,在密封胶的使用周期内安装好,以消除贴合面的间隙,避免电解液的残留产生电化学腐蚀。
5 水下机械臂联合试验
水下机械臂设计臂长11.539 m,其工作空间覆盖了空间站三舱构型的所有作业点,满足使用要求,如图10 所示。 在开展联合试验前分别开展了出厂测试和预验收测试,累计水下测试时间超过285 h,期间工作正常,满足GB4208 IP68 密封性能要求。 经过测试,水下机械臂末端位置精度优于±4.5 cm,锁定后末端持续(>60 s)承载能力不小于300 N,100 N 负载下变形量为100 ~135 mm,均满足技术指标要求。
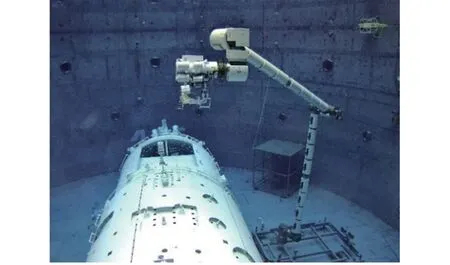
图10 中性浮力水下机械臂实物Fig.10 Neutral buoyancy underwater manipulator
经过关节性能测试、关节检漏、整臂检漏等部组件测试后,在航天员中心中性浮力水槽内开展了机械臂与水槽试验系统的联合测试。
交付后,神舟十二号航天员乘组利用水下机械臂开展了出舱活动训练,如图11 所示。 水下机械臂定点在空间站节点舱附近,支持航天员开展安装脚限位器和舱外工作台等出舱准备工作的训练。 之后航天员通过脚限位器站上水下机械臂,由水下机械臂将航天员运送到作业位置开展舱外作业支持训练,如图12 所示。 水下机械臂在2020 年12 月至2021 年9 月期间参与水下试验与训练任务,连续水下停放超过226 天,满足指标要求。
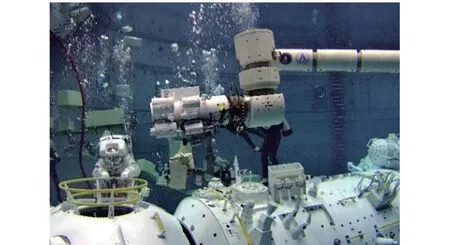
图11 利用水下机械臂开展出舱训练Fig.11 EVA training using underwater manipulator
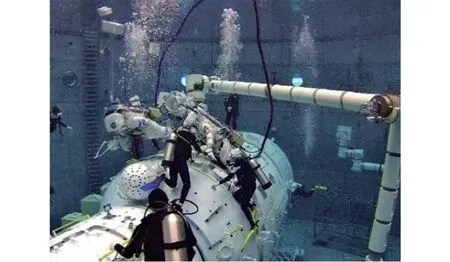
图12 利用水下机械臂开展作业点训练Fig.12 Operation training using underwater manipulator
6 结论
1)对于采用电驱动的水下机械臂,以关节为基本单元,采用多重冗余密封手段,可以在10 m水深下产生较好的防护效果。 水下机械臂交付使用已超过2 年,最长在水下连续使用超过226 天,期间未发生漏水现象,关节性能满足使用需求。
2)以关节为基本单元,采用浮力外壳与关节赋形设计进行浮力配平,可较好地解决机械臂重心始终处于变化状态的配平问题,减少浮力块对机械臂运动附加的干扰。
3)水下机械臂作为航天员在地面进行出舱活动试验和训练的重要设备,在功能、性能、操作体验等方面最大限度模拟真实机械臂产品,能够帮助航天员感受、适应并开展空间失重环境下站在机械臂末端的操作与活动训练,有效提升了空间站出舱活动水下试验的质量与有效性。