高速跨介质入水多相流动与流固耦合特性研究综述
2024-03-07明付仁王嘉捷刘文韬刘祥聚张阿漫
明付仁,王嘉捷,刘文韬,刘祥聚,张阿漫
(哈尔滨工程大学 船舶工程学院, 哈尔滨 150001)
0 引 言
航行体高速跨介质入水在海洋工程、航空航天领域中具有明确的研究背景,其中许多重要研究集中在国防领域,例如空投鱼雷、超空泡射弹等跨介质航行器的研制[1]。随着武器系统发展和防御体系的日益完善,当前对跨介质航行器以更高速度入水的需求越来越迫切,入水初速度有时可达上百米每秒。高速跨介质入水是跨介质航行器实现空水转化的重要过程,常出现自由液面飞溅、空化相变、气液混合流动现象。由于介质突变,产生的强冲击载荷对跨介质航行器的结构强度、弹道特性等具有重要影响。美国在20世纪30年代研制了空投鱼雷并在二战中投入使用,但由于缺乏对高速跨介质入水的多相流动及流固耦合机理的认识,鱼雷出现了结构塑性破坏、部件失效以及偏离轨迹等多类问题,其中有20%沉没,18%深度失准,36%未启动,20%偏航,仅有31%正常运行(多种故障并存被重复统计)[2]。
Moran曾指出[3]:“航行体出入水是一个富有挑战的数理难题,可涉及液面大变形和破碎、空化、重力、黏性、气体密度和表面张力等,对于跨水空介质过程,没有任何一种通用的理论分析方法能够得出有效的近似结果。”航行体高速跨介质入水是复杂的多相流动和流固耦合作用过程,当航行体运动速度超过150 m/s时,相对于空气和水中声速的马赫数分别达到了0.5和0.1以上,头部撞击水面会在水中形成强压缩的冲击波,同时引起水面破碎和飞溅,瞬态冲击致使水中出现低压空化区域;随着航行体入水深度增加,会逐步形成空泡流动,出现膨胀、溃灭和射流等气液混合流动现象。高速跨介质入水航行体的轴向载荷会先后经历“水锤”压力和水动力压力两个阶段,“水锤”压力为ρcv量级(ρ为流体密度,c为流体声速,v为航行体头部速度),而水动力压力为ρv2/2量级;而法向/径向载荷发生在航行体头部和侧壁沾湿以后,常引起航行体产生尾拍现象(如图1所示),尾拍冲击压力可达到轴向冲击压力的数倍,导致航行体产生大幅忽扑运动响应[4],同时也可能诱导航行体产生非线性振动响应,甚至弯曲折断[5](如图2所示)。
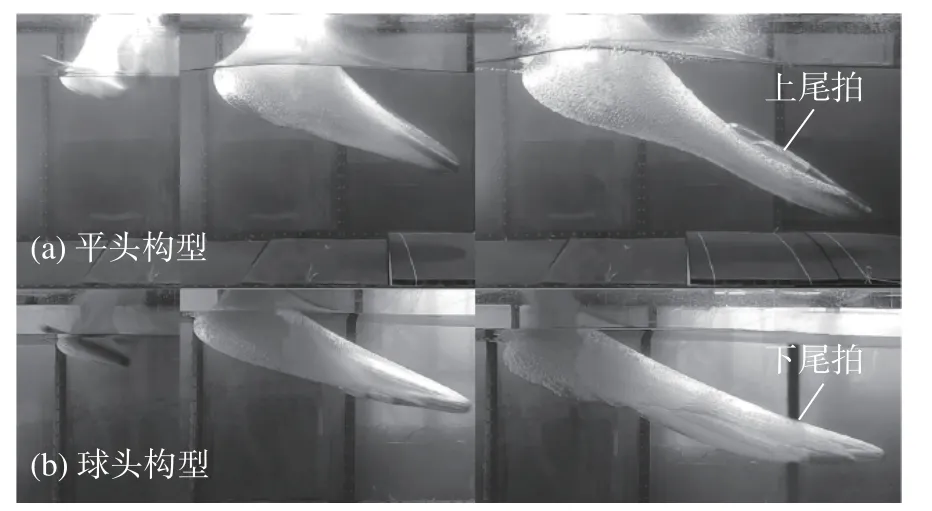
图1 跨介质入水的空泡流动及剧烈的尾拍现象Fig.1 Cavitation flow and violent tail slamming during water entry

图2 跨介质入水尾拍作用导致航行体的弯曲折断过程[5]Fig.2 Bending and breaking process of the projectile caused by the action of the tail slamming during water-entry[5]
在前期研究中,许多研究学者将跨介质入水过程分解为4个典型阶段,即撞击水面阶段、液面流动阶段、开空泡阶段和空泡闭合阶段[6](如图3所示)。在撞击水面阶段,头部强压缩空气形成气垫,自由液面大变形,流场中形成强间断的波系;在液面流动阶段,气液混合流沿着航行体爬升、脱离边界层,以惯性向外飞溅,头部流场逐渐发展为空泡,低压区出现局部相变空化,由于介质突变,此过程会产生显著的轴向冲击过载;在开空泡阶段,空泡逐渐的拉伸会形成低压空腔,空气不断地卷入空泡内部(如图4所示),形成多相掺杂流动,同时空泡壁在惯性作用下扩张,航行体与空泡壁发生砰击作用,引起法向冲击载荷和俯仰力矩,导致航行体俯仰角速度瞬态变化,有时甚至出现初始弹道的不稳定以及航行体结构振动、局部变形或损坏等;在空泡闭合阶段,受重力和空泡内外压差作用,自由液面回落引起空泡闭合和振荡,航行体在空泡中向前运动,尾部会与空泡壁发生反复碰撞,即尾拍作用,该过程会产生不连续的、高峰值的尾拍载荷,导致航行体出现忽扑运动[4],同时也可维持航行体的弹道稳定。
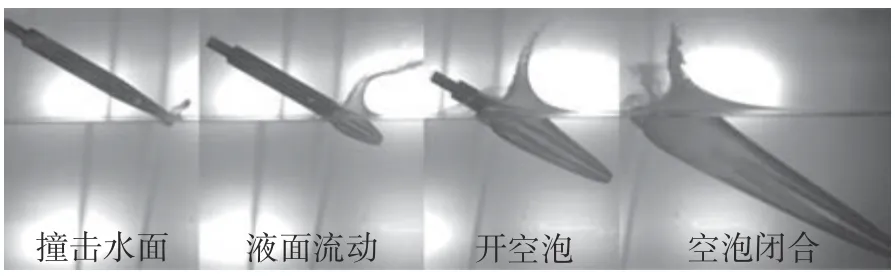
图3 航行体跨介质入水的4个典型阶段Fig.3 Four typical stages of water-entry of transmedium vehicles

图4 高速跨介质入水航行体尾部空气卷入现象(航行体直径273 mm,入水速度240 m/s,角度30°)Fig.4 Air entrainment at the tail of the vehicle during highspeed water entry (The vehicle has a diameter of 273 mm, an incident velocity of 240 m/s, an incident angle of 30 deg )
整个高速跨介质入水的多相流动和流固耦合过程呈现出流场对流迁移、结构塑性损伤和破坏等典型的非线性特征,涉及到水弹道学、多相流体动力学、空泡动力学、流固耦合动力学等众多基础力学问题,相关研究具有重要的科学意义。此外,通过探明高速跨介质入水的多相流动和流固耦合等相关机理与规律可为高速跨介质航行体的降载增稳、流动控制、结构安全设计等提供重要的技术支撑,具有重要的工程应用价值和应用前景。下面将分别从高速跨介质入水的多相流动与空泡演化、强冲击载荷特性及降载方法、航行体运动稳定性与流固耦合响应特性以及多相流固耦合数值研究方法这4个方面进行论述,并对高速跨介质入水的发展动态进行展望。
1 高速跨介质入水多相流动与空泡演化特性
高速跨介质入水流场存在自由液面大变形、流体相变、空泡流动与闭合等复杂的气-汽-液多相流动过程,自由液面演化、空泡流动等一直是关注的焦点,自由液面作为入水空泡的“开口”,其流动与空泡的扩张和闭合息息相关。在撞击水面时,流场经历强压缩过程,在空气中和水中形成复杂的波系,流场压力、密度等存在强间断面,部分水体会因拉伸作用而出现少量空化。在穿越水面和开空泡时,空泡壁在惯性作用下扩张,空泡内外开始出现压力差,一部分空气被卷入空泡内部。在航行体完全进入空泡内部后,空泡内压降低,产生更多的空化蒸汽,在惯性力、重力以及内外压力差作用下,空泡会逐渐趋于闭合[7],包裹着整个航行体一起向前运动,如图5所示;同时空泡尾部出现泄气、溃灭和尾射流[8],如图6所示。不同于高速水下航行的多相流动与空泡演化过程,高速跨介质入水过程受自由液面的影响较大,自由液面的向上隆起会缩短空泡的惯性扩张过程,同时自由液面闭合也会加速空泡的收缩过程,引起空泡的扩张和收缩时间的非对称性。

图5 跨介质入水空泡的形成及闭合过程[7]Fig.5 Cavity formation and closure process during water entry[7]

图6 高速跨介质入水空泡流动与溃灭特性[8]Fig.6 Cavitation flow and collapse characteristics during high-speed water entry[8]
1.1 空泡形态演化及闭合特性
关于入水空泡形态的研究起步较早,最早可以追溯到1969年Logvinovich建立的空泡截面独立扩张理论,能够很好地针对非定常空泡的不同截面演化进行理论计算,为空泡理论的发展奠定了重要基础[9]。发展至今,已有众多学者对空泡形态演化进行了深入研究,Hong等提出了一种简单的理论模型可用于斜入水空泡形状的预测,并通过圆柱定速入水试验验证发现,随着自由液面上方空气密度减小,球体垂直入水引起的液面飞溅和表面闭合时间均会增加[10-11]。Zhang等提出的气泡统一方程,计及空泡脉动和环境耦合力,可用于预测空泡形态演化[12-14]。此外,早期受限于试验技术,许多研究将简单的球体作为研究对象,研究了高速旋转小球入水空泡的形成、发展、闭合和溃灭的演化过程[15-17],并指出垂直入水和斜入水在空泡演化方面存在显著差别。空泡闭合形式一般可简单地分为面闭合和深闭合,深闭合时空泡溃灭及射流形式取决于航行体加速度与临界值的关系;另外无论是否发生面闭合,都会产生深闭合,且深闭合时间为弗劳德数(Fr)的线性函数[18-19]。随着试验技术不断进步,更多的试验研究表明航行体的稳定性、航行阻力均与空泡形态极为相关[20-21]。不同尺度航行体,大至数百毫米口径的鱼雷,小至几毫米口径的射弹,其高速跨介质入水过程均可划分为空泡生成、发展和脱落阶段,在空泡闭合区域出现强烈的汽-气-水混合物回射流,同时在空泡尾部产生整齐、规律的脱落旋涡[8,22],如图6和图7所示。当入水速度增加时,流场可压缩性影响增强,将主要影响超空泡中部和尾部的形态,使其半径和长度进一步增加[23]。此外,还有学者分析了航行体头型、弗劳德数(Fr)、航行体表面亲疏水材料性质等各种参数对空泡闭合时间、闭合位置以及空泡在自由液面处的最大半径的影响。结果表明:随着Fr增加,不同头型航行体面闭合时间变化规律各不相同,平头和半球头航行体面闭合时,自由液面处最大空泡直径不断减小,而对于圆锥头航行体,最大直径将会先增加后减小;面闭合后,对于半球头和圆锥头航行体,深闭合时最大空泡直径随Fr增加而增加,而闭合深度将会先缓慢变深后变浅[24];材料疏水性将促进空泡形成,使空泡直径变大,同时延缓了空泡闭合[25]。

图7 平头射弹空泡演化及尾部脱落旋涡发展历程[22]Fig.7 Cavity evolution and shedding vortices characteristics during water entry of the projectile with flat nose[22]
1.2 空泡内压演化特性
航行体入水过程中空泡内会形成低压区(如图8所示),压力比周围水流场的压力低。当航行体以较低速度入水时,表面闭合一般很晚发生或者不发生,空泡内压最低时刻出现在空泡闭合前,此时航行体所受压差作用影响较小。但是随着入水速度增加,空泡内压最低值几乎呈线性减小趋势[26],航行体迎水面和背水面的压差阻力逐渐增大[27]。尤其是在航行体头部后方靠近航行体的区域压力将会低于饱和蒸汽压,从而产生空化,法向载荷增大,产生改变航行体运动姿态的俯仰力矩,导致航行体发生尾拍,破坏空泡的光顺性,对高速跨介质航行体运动稳定性产生不利影响。另外,空泡内压还与航行体头部几何形状有关,现有研究表明航行体头型将会改变高速跨介质入水过程在自由液面处的空泡直径,以及在自由液面上方形成皇冠状水冢,这两个因素都会影响空泡面闭合的时间,从而影响空泡内压的演化[28]。
图8 高速跨介质入水空泡内压随时间变化[26]Fig.8 Time history of the inner pressure in cavity during high-speed water entry[26]
1.3 复杂环境的空泡演化特性
高速跨介质入水空泡的演化特性与实际环境密切相关。实际工程应用对多发弹体高速入水有着重要的需求,其中并行入水和异步入水的空泡形态演化规律也渐渐被掌握。Lu等开展了异步并行入水研究,发现后射弹挤压首射弹空泡内侧,导致首射弹空泡轮廓形态不对称,后发射弹的空泡在首发射弹空泡内部低压区的正向激励下向航行体内侧膨胀,同时影响射弹的弹道特性[29]。由于海洋环境复杂多变,洋流与波浪联合作用会对空泡产生重要影响(如图9所示),尤其是横流能够促进背流侧空泡但抑制迎流侧空泡[30]。此外,受复杂环境扰动力影响,航行体容易发生尾拍现象,破坏空泡的形态和空泡壁的光滑度,导致航行体弹道失稳,使得航行体入水失败,如图10所示。为了维持航行体水下航行的空泡,许多学者提出了在航行体头部通气,基于通气参数调节实现对通气空泡流动和演化的人工控制,空泡型式可由锥形逐渐变化为纺锤形[31],入水的最大冲击力和压力可分别降低92%和98%[32],从而达到流动控制和减阻的效果。当前,针对实际工程应用环境,关于跨介质入水的燃气和通气空泡研究仍存在很大的不足。

图9 波浪环境对航行体入水空泡演化的影响(航行体直径324 mm,入水速度100 m/s,角度30°)Fig.9 Influence of wave environment on the cavity flow of a vehicle during water entry (The vehicle has a diameter of 324 mm,an incident velocity of 100 m/s, an incident angle of 30 deg)

图10 航行体入水尾拍导致弹道失稳(航行体直径100 mm,入水速度40 m/s,角度20°)Fig.10 Ballistic instability caused by the tail slamming of the vehicle during water entry (The vehicle has a diameter of 100 mm,an incident velocity of 40 m/s, an incident angle of 20 deg)
2 高速跨介质入水强冲击载荷特性与降载方法
关于跨介质入水的冲击载荷,最初比较经典的理论始于Von Karman等引入附加质量对水上飞机降落冲击压力的推导和计算[33]。此后,Wagner进一步考虑了入水过程的水面凸起及喷溅厚度,引入了楔形体底升角修正因子,但仍只适用于小底升角入水问题[34]。Mei等、Korobkin 和 Scolan进一步推广了Wagner理论[35-36],将其应用于一般二维物体和简单的三维物体,通过特定的线性化假设,开展了垂直入水的水动力载荷理论研究,但这些线性模型仍存在局限性,后续许多学者进行了改进研究,如Zhao 和 Faltinsen的任意截面体模型[37],Semenov 和 Iafrati的轴对称体入水模型[38]、Hulin等的计及重力的Wagner模型[39]。入水冲击载荷的理论研究起步较早,但相关研究多集中在某些特定的、简单几何问题上,缺乏完善的理论模型。
2.1 撞击水面过程的冲击载荷特性
撞击水面过程的冲击载荷主要发生在航行体轴向,流体压缩性是冲击载荷特性研究的重要方面。当航行体入水速度较高或者头部比较钝时,流体的压缩性将会对载荷产生重要影响[40]。现有研究表明,当入水速度小于100 m/s时,流体压缩性对入水冲击载荷基本没有影响,随着入水速度增加,流体的压缩性影响变大[41-42]。为了计及流体压缩性,许多学者基于线性化假设,推导出入水冲击最大的压力为 ρcv量级( ρ,c,v分别为流体密度、声速和入水速度),即“水锤压力”,局部压力可以达到几十甚至上千个大气压,而当航行体头部完全浸入水中,冲击载荷急剧减小,并趋近于水动压力。当考虑流体真实可压缩性时,高速跨介质入水的阻力系数、空泡尺寸将会有所增加[43]。此外,许多研究发现航行体轴向过载的峰值基本发生在入水初期,通过理论分析和数值模拟等已对其有了很好的认识,并采用激波影像可视化系统捕捉并研究了高速跨介质入水冲击波的传播特性[44]。Sui等开展了跨介质入水冲击试验研究[45],建立了可压缩流体的流动与入水冲击载荷的联系,分析了冲击载荷的形成过程。此外,学者们对冲击载荷的影响因素也进行了大量探索,结果表明头型、入水速度、角度和攻角[46]、波浪环境[47-48]、极地冰区环境[49]等多种因素均会对冲击载荷产生影响。平头航行体由于水动力面较大,会产生较大的冲击压力,而截锥头型、锥型头型等由于流体的爬升会卸载瞬态的冲击压力,导致冲击载荷降低。此外,相比于垂直入水,斜入水过程的冲击压力也会随着流体沿着航行体壁面的流动而导致轴向载荷降低,但此时法向载荷会变得非常复杂[46]。波浪的质点运动会产生不对称的压力分布,尤其是在波峰和波谷位置,但随着深度增加,质点速度迅速衰减,因此随着航行体不断深入,这种不对称现象逐渐消失[50]。而极地冰层的存在,对于空泡演化会产生剧烈影响,复杂的空泡溃灭产生的高压会引起强烈的交变载荷,同时低温将加快面闭合和深闭合,大大影响航行体表面压力[51]。
为了研究大尺度航行体高速跨介质入水的冲击载荷形成机理与分布规律,哈尔滨工程大学建造了长25 m、深14 m、宽7 m的水池,自主开发了基于气动弹射原理的高速跨介质入水发射装置(如图11所示),并配有先进的光测和电测系统以及弹载测试系统,能够满足直径200 mm、速度300 m/s以内大尺度航行体模型高速全角度入水试验要求,并配套搭建了高效拦截装置,可利用高速摄像拍摄水上、水下多视角入水空泡演化和弹道特性(如图12所示),实现了电测与光测联合对高速跨介质入水载荷、空泡、弹道等数据的精确测量。

图11 大尺度跨介质水池及高速跨介质入水试验Fig.11 Large-scale water tank and high-speed water entry experiment

图12 高速跨介质水上、水下视角空泡演化和弹道特性(航行体直径100 mm,入水速度60 m/s,角度30°)Fig.12 Cavity evolution and ballistic characteristics of high-speed vehicle during water entry in views of above and below water surface(The vehicle has a diameter of 100 m, an incident velocity of 60 m/s, an incident angle of 30 deg )
2.2 尾拍过程的冲击载荷特性
尾拍是航行体高速跨介质入水后期发生的重要现象,产生的尾拍载荷常呈现多峰、不连续特征。对于水中高速航行体,常通过两种假定模型计算得到尾拍力,包括基于Wagner的圆柱体平面滑行力模型和基于虚拟质量法的尾拍力模型。前者通过将该过程视为圆柱体侵入圆形液面,从而解得滑行力;后者假设水流经过尾部后与航行体侧壁平行,通过动量方程解得尾拍力。但是,这些理论在高速跨介质入水方向的应用并不理想,一些学者通过数值和试验进行了相关研究。周浩磊等采用试验研究了伴随超空泡的小尺度航行体高速跨介质入水的典型力学现象[52],并指出尾拍会导致航行体尾部与空泡壁面反复碰触,引起角速度突然变化,即“忽扑”。当航行体尾拍触水,轴向和法向载荷迅速增加并产生往复的、近似周期性的变化,对航行体后续运动姿态会产生重要影响[53]。Liu等开展了预置舵角航行体入水尾拍研究,发现随着入水速度增大,尾拍频率增加,尾拍载荷和频率会随着预制舵角的增加而增大,此时法向载荷会是轴向载荷的2.5倍[54],如图13所示,尾拍载荷可能对细长航行体构成严重的威胁。

图13 高速跨介质入水尾拍载荷及空泡形态[54]Fig.13 Tail slamming load characteristics and cavity shapes during high-speed water entry[54]
2.3 跨介质入水的降载特性
高速跨介质过程由于介质突变,引起的瞬态冲击载荷异常突出,对航行体结构安全和弹道轨迹影响较大,许多学者进行了高速跨介质入水的降载研究,常用的降载方法包括采用多孔泡沫缓冲头帽[55]、弹簧缓冲连接[56]、航行体头部/侧部通气[57]、降载空化器(如图14所示)[58]等。缓冲材料能够在撞水时吸收一定的冲击能量,通过多层设计和预设沟槽能够保证罩壳和泡沫及时脱离并延长破坏时间,有效降低入水冲击载荷[59]。弹簧缓冲并非总是能够降低冲击载荷,这取决于关键因素“水弹性”的影响,其与问题的水动力和弹性时间尺度有关[60]。通气降载主要是通过形成超空泡流型,将航行体完全包裹在空泡中,减少航行体沾湿面积,从而降低轴向和法向载荷。但随着入水速度增大,由于通气抑制了自然空化,使得航行体不能完全包裹于空泡中,侧面发生了沾湿,影响了航行体受到的法向冲击载荷[61]。此外,Elhimer等、Chuang等提出通过在水池底部曝气使流场变为气液混合流,进而降低航行体入水的冲击压力[62-63];Korkmaz等通过试验发现疏水效应改变了结构表面的流动分离和飞溅形成,航行体动能更多地传递给了射流,从而降低了冲击载荷[64]。这些研究多数针对的是跨介质入水轴向降载,为跨介质航行器的抗冲击设计提供了比较丰富有效的措施,但是目前对于尾拍载荷降载方法以及如何利用尾拍进行流动控制的研究仍较为匮乏。

图14 跨介质入水的多级降载结构[58]Fig.14 Multi-stage load reduction structure applied in high-speed water-entry[58]
3 高速跨介质入水航行体运动稳定性与流固耦合响应特性
高速跨介质入水航行体与流场间存在复杂的流固耦合作用,在撞击水面过程中,由于介质突变,强冲击载荷会导致航行体局部变形或者破坏,同时头部沾湿引起的忽扑力矩,会导致航行体发生俯冲、跳飞等弹道不稳定现象;在开空泡和空泡闭合过程中,航行体的沾湿状态将影响着动力载荷的分布,航行体会发生尾拍作用,尾拍砰击力会引起局部振动或损伤,形成的截面弯矩可能造成航行体总体弯曲变形或折断,整个入水过程航行体的流固耦合运动与结构响应异常复杂,如图15所示。

图15 航行体高速跨介质入水过程的瞬态流固耦合响应(航行体直径324 mm,入水速度100 m/s,角度30°,左图结构变形放大20倍)Fig.15 Transient fluid-structure interaction response of a vehicle during high-speed water entry (The vehicle has a diameter of 324 mm,an incident velocity of 100 m/s, an incident angle of 30 deg.The structural deformation is enlarged by 20 times at left column )
3.1 航行体运动响应和弹道特性
高速跨介质入水过程受流场的破碎飞溅、气液流动、相变空化等因素影响,可能导致航行体产生俯冲、跳弹、尾拍等剧烈的运动响应[65-66],尤其是小角度斜入水初期结构的冲击振动会改变自由液面流动,加剧跳弹现象的发生,对航行体的运动稳定性产生重要影响。早期,Park等基于势流理论计算了高速跨介质入水弹跳过程[67],后续研究发现航行体水下弹道受入水角度、入水速度、航行体头部形状等多种因素影响(如图16所示)[68]。一般来说,具有平整头部、接近于垂直水面的大角度入水的航行体具有更直的水下弹道,水下运动姿态也更为平稳。航行体的转平时间及运动轨迹也与头型密切相关,这主要取决于作用在航行体头部的作用力和力矩,入水速度并不会改变航行体转平前的轨迹,入水角增加会导致转平时间和弹道增长,各参数之间存在耦合影响[69-70]。此外,黄鸿鑫等研究发现射弹质心靠前有利于提高射弹的入水运动稳定性,但会增加射弹的尾拍次数[71]。Sui等研究了跨介质入水航行体的运动轨迹[72],分析了航行体的稳定弹道和弯曲弹道形成的流体动力学过程。Wang等开展了具有初始攻角的入水研究,发现小攻角情况下航行体沾湿后法向载荷趋于零,轨迹相对较直,但随着攻角增大,沾湿后航行体受到的法向载荷增大,导致轨迹弯曲,且正攻角会使尖头航行体出现向上的轨迹,负攻角会产生俯冲运动[73]。王晓辉等研究了有攻角射弹高速跨介质入水的载荷及弹道特性[74],发现尾拍对射弹水下载荷和弹道性能有重要影响,指出尾拍是尾翼稳定机制下的一种动态稳定运动形式[75],控制尾拍是实现航行体高速跨介质入水运动控制的主要手段之一。
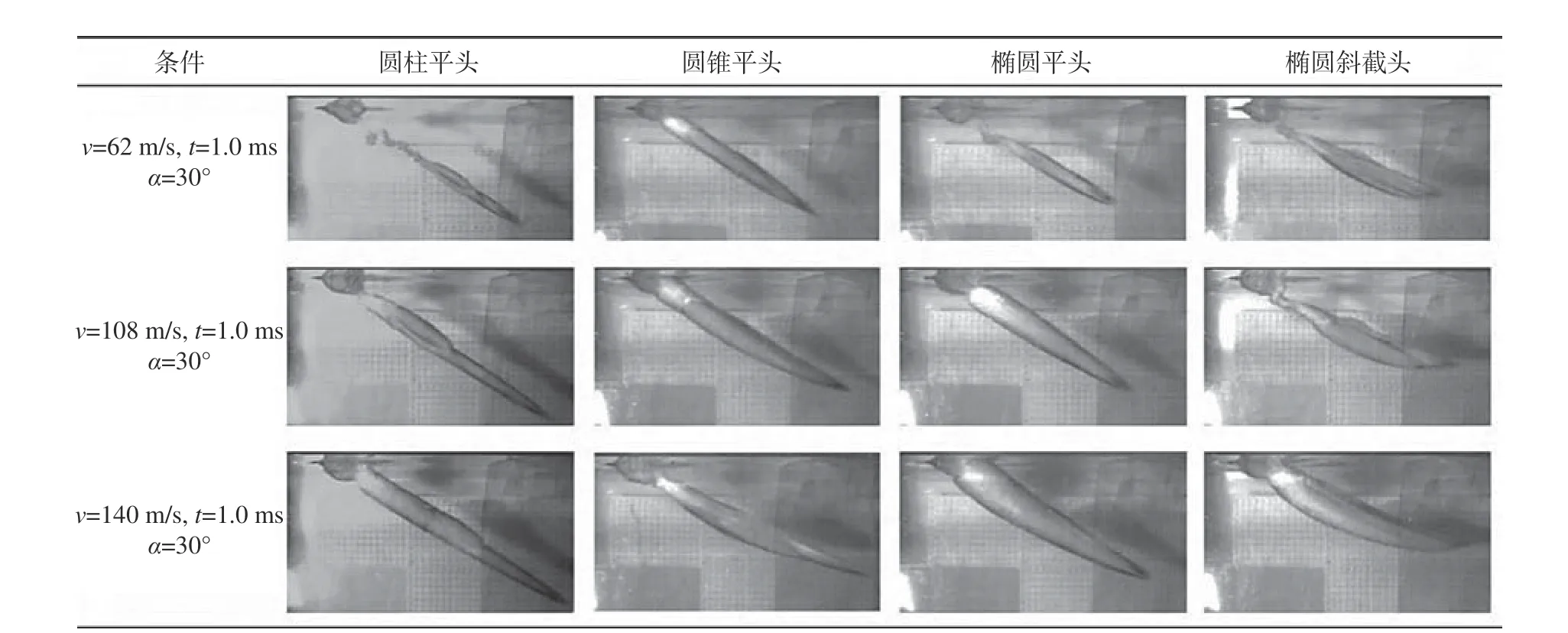
图16 不同头型航行体入水在同一时刻的运动响应[68]Fig.16 Motion responses of vehicle with different head shapes at the same time[68]
3.2 航行体入水航行的流动控制方法
为了实现航行体水中运动姿态的可调可控,目前常用的控制方法包括通气的流态开环控制和基于舵翼的姿态闭环控制[76],如图17所示。对于通气的流态控制,通过向空泡内通气调节空泡流态,不仅能够达到减阻的目的,而且通过改变通气参数,能够延长空泡生存时间,扩大空泡尺寸,减弱空泡溃灭产生的尾射流影响[77-79],进而改善航行体水中航行环境,如调节空化器后方的负压区,实现流动控制。对于水动舵翼控制,现有方案更多应用于鱼雷和无人航行器等水下航行阶段全沾湿状态,通过水动舵翼的快速响应对航行体运动姿态和轨迹进行闭环控制,使得航行体的稳定性显著增高[80-81];而对于高速跨介质入水阶段,由于速度高、时间短,水动舵翼的控制是否及时有效的相关研究较少,并且多数闭环控制方法仅从理论和数值两方面进行了研究,很少通过相关试验进行论证。

图17 高速跨介质入水流动控制方法Fig.17 Flow control method during high-speed water entry
3.3 航行体流固耦合响应特性
高速跨介质入水是瞬态的流固耦合作用过程,流场的强冲击载荷作用在航行体结构上会引起局部和总体的弹塑性响应;反过来,航行体结构的响应也会改变空泡的演化过程,航行体变形和破坏会对冲击作用位置、液面飞溅等产生影响,导致流体动力载荷改变,如图18所示,因此流场与结构的作用是实时双向耦合的。
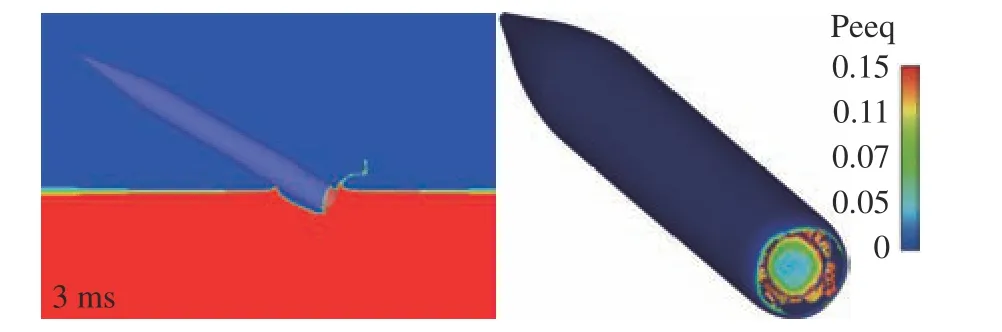
图18 高速跨介质入水航行体局部破坏(航行体直径324 mm,入水速度150 m/s,角度30°)Fig.18 Local fracture of the projectile during high-speed water entry (The vehicle has a diameter of 324 mm, an incident velocity of 150 m/s, an incident angle of 30 deg )
目前针对高速跨介质入水流固耦合效应的研究结果表明:当考虑结构的弹塑性响应时,得到的冲击载荷曲线更为抖动且总体上数值要小于假定刚性体的仿真结果[82],同时结构变形将会影响垂直入水和斜入水过程中空泡形态的发展[83]。许多研究将焦点集中在高速跨介质入水的水弹性效应、结构响应机理与规律。施红辉等、桂蜀旺等基于LS-DYNA的弹塑性本构关系研究了高速跨介质入水的冲击载荷响应机制和应力变化规律[84-85]。李天雄等基于AUTODYN和FLUENT联合仿真研究了弹塑性材料射弹高速跨介质入水弹道转向的特性[86]。王铭等采用任意拉格朗日-欧拉法(arbitrary Lagrange-Euler, ALE)研究了航行体高速跨介质流固耦合机理[87],分析了结构的弹塑性对高速跨介质入水冲击载荷的影响及流固耦合响应规律。Chaudhry等基于ALE方法研究了头部可变形自主式水下潜器(autonomous underwater vehicle,AUV)入水过程的水弹性效应,分析了入水冲击载荷的频域特征[88]。Zhang等研究表明当楔形体弹性较大时,随着底升角增大结构变形会更明显,之后又会减小;当弹性较小时,结构变形会随着底升角的增加而减小[89]。Yang等从弹性波在球内传播和冲击能量吸收两方面阐述了结构黏弹性对球的动应力和自由表面压力的影响机制,尤其是高速冲击时,结构黏弹性将影响球的变形行为和沾湿面积,当剪切模量一定时,可以定性预测其影响[90]。Xia等探究了完全封闭圆柱壳和半封闭圆柱壳入水的区别,发现完全封闭圆柱壳入水时上下壁均发生变形且下壁变形远大于上壁变形;半封闭圆柱壳最大受力发生在上壁中心位置,最大应力发生在边缘位置,且上壁变形随着射流冲击而产生,随着射流离开而恢复,这一现象也导致了其速度发生周期性地减小和增大[91]。总的来说,跨介质入水的流固耦合响应异常复杂,与航行体的构型、结构参数和运动参数等密切相关。
4 高速跨介质入水的多相流固耦合数值研究方法
高速跨介质入水过程常伴有自由液面大变形、流体相变、气液掺杂、运动界面失稳、冲击振动、结构损伤等非线性物理现象。在理论研究方面,受流体压缩性、强非线性等限制,当前的理论推导多数仍是基于无黏的势流理论,不考虑流体的可压缩性,而且多数是针对简单几何模型的垂直入水,且仅适用于入水速度较低的情况。在试验研究方面,随着试验条件的发展已经取得了很大的进步,但是高速跨介质入水的瞬时、高过载特性使得试验采用的随体测试系统备受考验,此外,试验代价比较昂贵,获得的相关数据仍非常有限。因此,现阶段许多学者着重发展了高速跨介质入水问题的流固耦合数值方法,根据问题域的离散方法,一般可以分为有网格方法和无网格方法。
4.1 有网格方法数值研究
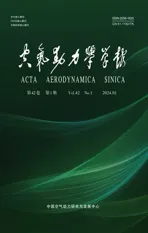
有网格方法是高速跨介质入水流固耦合研究的重要方法,Liu等计及流场压缩性,建立了多相流的三 维 欧 拉 有 限 元(Eulerian finite element method,EFEM)计算模型,改进了流固耦合浸没界面耦合算法,开发了多级分辨率网格计算技术,形成了适用于大规模计算的高效并行算法,实现了高速跨介质入水流固耦合界面的稳健求解[7],探明了头型对法向载荷、截面弯矩和尾拍形式的影响规律,如图19所示。Zhi等基于耦合的欧拉-拉格朗日(coupled Euler-Lagrange, CEL)方法提出了一种结合锥形空化结构、内置伸缩杆和吸能材料的多级降载结构,并确定了相关尺寸设计[58]。Hong等基于贴体网格法,采用简化的五方程描述水气混合流的控制方程,提出了计及重力效应和轴对称流的压力松弛方法,有效模拟了跨介质入水可压缩性的影响,探明了曝气量对冲击载荷的作用规律[57]。Wu等在边界元(boundary element method, BEM)方法基础上,提出了一种完全非线性边界条件下速度势的数值计算方法,成功模拟了小球出水、再入水的过程,结果表明空泡闭合向上的射流起源于自由面下方局部高压[92]。但是当流体域拓扑结构发生复杂变化时,例如在空泡面闭合产生尾射流情况下,网格恶化会给数值计算带来很大困难。De Rosis和Tafuni提出了一种原创的相场格子玻尔兹曼方法,能够较好地预报水静力和水动力作用,具有稳定性好,易于捕捉界面、方便并行等优点[93],但在求解三维问题时耗时较多。Wang等基于有限体积法,引入Kunz空化模型,开发了一种基于压力的可压缩多相求解器,探索了空泡内部流动特性,发现水平自由表面附近的涡环处的压力明显低于腔内其余区域压力,其存在有助于空泡闭合,如图20所示[94]。Jiang等采用交叉黏度方程耦合Schnerr-Sauer空化模型分析减阻溶液中航行体的阻力和空泡形态、流动特性,结果表明减阻溶液在增强空化和减阻方面具有广阔的发展前景[95]。此外,不同的空化模型被应用于研究高速跨介质入水空化流场的流体动力特性[96-98]。目前常用的网格类计算方法、空化模型和湍流模型多数集成于通用的商业软件Star CCM+、FLUENT、LSDYNA、ABAQUS、MSC.DYTRAN、AUTODYN等,这些商业软件内部的核心算法并不透明,而且由于软件封装,缺少足够的灵活性。此外,由于网格畸变、多相运动界面处理的困难,有网格方法在高速跨介质入水流固耦合问题中的应用仍存在一些不足。
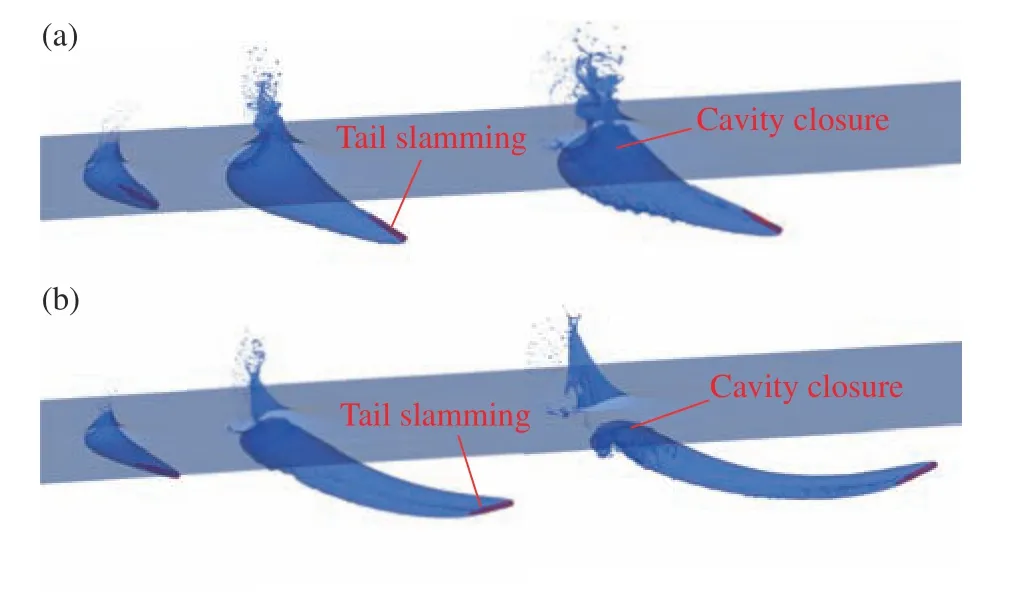
图19 基于EFEM模拟不同尾拍形式:(a)上尾拍,(b)下尾拍[7]Fig.19 Different patterns of tail slamming based on EFEM simulation, (a) slam upward, (b) slam downwar[7]
4.2 无网格方法数值研究
对于无网格方法,例如光滑粒子流体动力学(smoothed particle hydrodynamics, SPH)方法,由于不受网格的约束和限制,拉格朗日粒子性质使得其在处理自由液面大变形、飞溅等流固耦合问题中具有先天的优势。为了解决航行体入水的流固耦合问题,Sun等提出了δ+-SPH数值模型与计算方法[99],并结合优化的自适应粒子细化技术[100],将该技术推广到三维入水问题的模拟中[101]。杨松在前人研究基础上建立了计及流场压缩性的流固耦合SPH方法,并实现了跨介质入水多相流动问题的快速、稳定模拟[102]。Zhao等开发了多图形处理器(graphics processing unit,GPU)多级分辨率的SPH方法,均衡了各GPU、各线程的负载,有效提高了计算效率,研究表明空泡非对称性随着入水角度减小而增加,且与航行体头型有关,但入水速度对其几乎没有影响(如图21所示)[103-104]。为了减弱有限计算域边界效应的影响,Wang等基于阻抗匹配原理,提出了适用于高速流固耦合的新型穿透无反射边界条件施加方法[105],消波效果优于传统的海绵层边界与流出边界。此外,考虑到黎曼求解器在处理间断面时的优势,构建了新颖的耗散限制器,建立了改进的Riemann-SPH数值模型,准确模拟了入水的气垫效应及砰击载荷[106-107]。其他较多应用于跨介质入水模拟的无网格方法还包括:不可压光滑粒子动力学(incompressible smoothed particle hydrodynamics,ISPH)方法[108]、更新拉格朗日粒子动力学(updated Lagrangian particle hydrodynamics, ULPH)方法[109]、移动粒子半隐式(moving-particle semi-implicit, MPS)方法[110]等。此外,采用无网格方法在模拟流固耦合结构响应问题时,有两种常见形式,一种是将无网格方法和有网格方法耦合,借助于不同方法的优势求解流固耦合问题,例如,Huang等建立了流固耦合方法,采用MPS模拟剧烈的自由液面流动,采用有限元方法模拟航行体结构的运动及变形[111];另一种是完全无网格方法,通过粒子运动实时更新流固耦合界面和结构变形,可以避免网格更新或重构操作,例如,Wang等建立了完全SPH粒子法模拟流固耦合问题,克服了压力震荡、数值空洞和拉伸不稳定现象[112-113],引入黎曼SPH求解器求解流体动力载荷,基于完全拉格朗日SPH模拟结构的变形和破坏,由于具有完全无网格粒子特性,因此具有较为明显的优势。
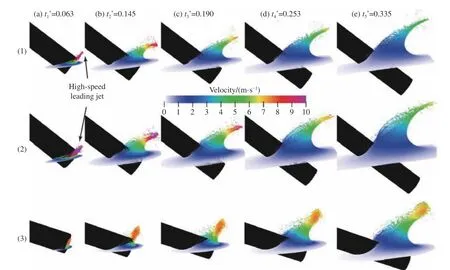
图21 基于SPH模拟航行体高速跨介质入水飞溅现象[103]Fig.21 Simulation of splashing of a projectile during high-speed water entry based on SPH method[103]
4.3 流固耦合分析FSLAB基础工业软件
高速跨介质入水的流固耦合作用呈现出复杂的多相流动和非线性的流固耦合特征,虽然目前一些商用软件已经集成了多种数值方法,但许多代码并不开放,可移植性差,缺乏灵活性。为此,哈尔滨工程大学开发了具有完全自主知识产权的高速跨介质入水流固耦合分析FSLAB基础工业软件。该软件具有完备的前处理、求解器和后处理模块,如图22所示,能够解决高速跨介质的复杂力学计算难题,集成了欧拉有限元(EFEM)方法、边界元法(BEM)、光滑粒子流体动力学(SPH)方法、重构核粒子法(RKPM)等多种数值方法,可实现亿级网格或粒子的快速并行计算,突破了当前国外商用软件的技术封锁[114],并且已经应用于水下爆炸与舰船毁伤及防护、高速跨介质动力学等多个领域。
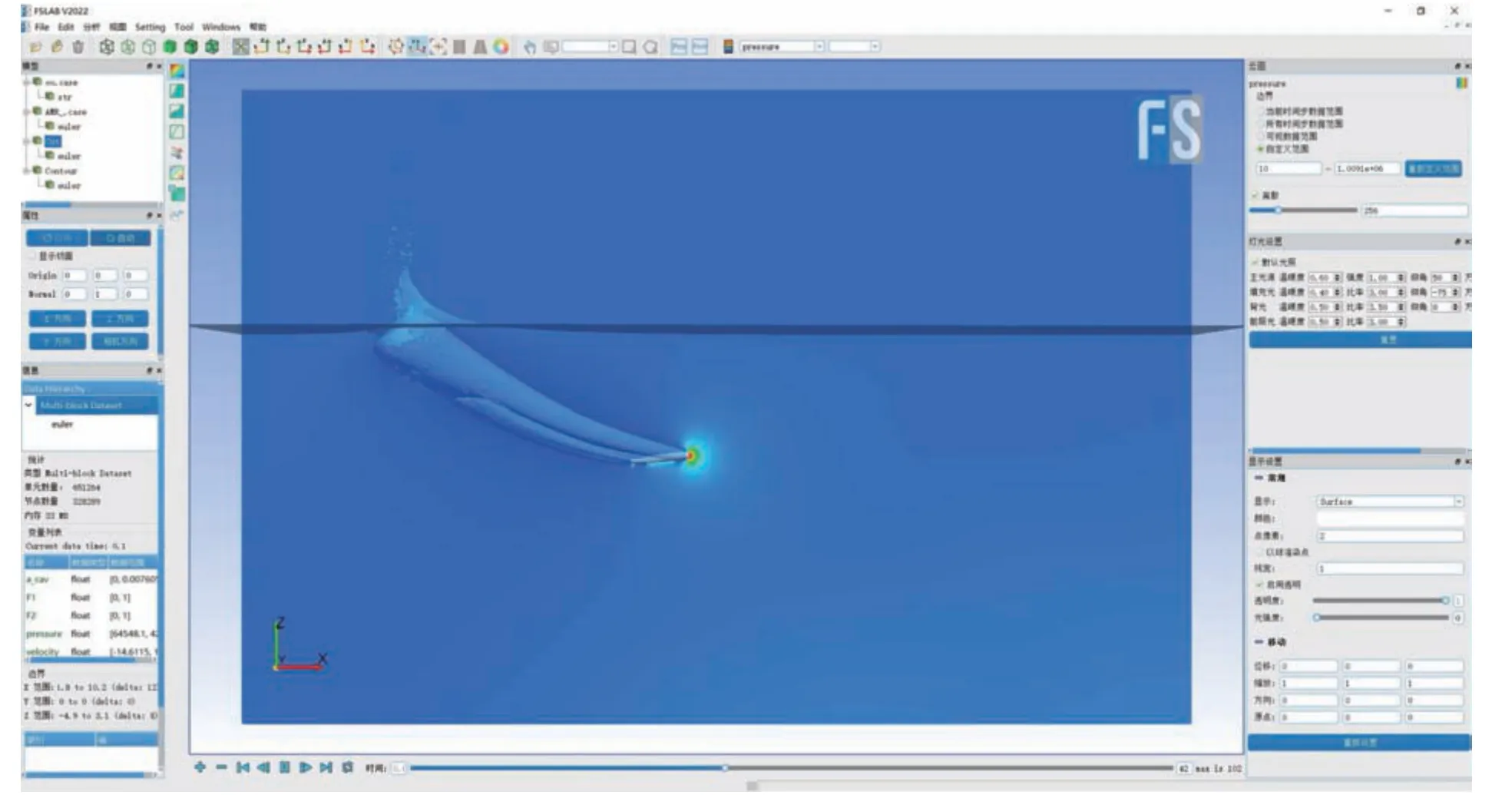
图22 流固耦合分析的FSLAB基础工业软件Fig.22 FSLAB industrial software for fluid-structure interaction analysis
5 总结与展望
本文从高速跨介质入水的多相流动与空泡演化、强冲击载荷特性与降载方法、运动稳定性与流固耦合响应、多相流固耦合数值方法等方面,分别论述了相关研究的现状,总的来说,当前研究基于理论、数值和试验方法在高速跨介质入水的自由液面破碎和空泡形态演化、轴向载荷形成规律及降载、航行体与空泡的耦合作用特性等方面均取得了长足的进步,可为高速跨介质入水的载荷预报、运动控制及航行体结构设计等提供一定的参考。在后续研究中,可深入研究的方向包括:
1)在多相流动与空泡演化方面:当前空泡理论的发展研究多基于空泡截面的独立膨胀理论,且多集中在航行体水下航行过程,缺少计及空泡非对称和自由液面效应的空泡理论。此外,高速跨介质入水存在复杂的气水作用界面,当前关于复杂海洋环境对入水空泡形态演化、空泡载荷影响机理尚不清晰,相关研究比较匮乏。进一步地,计及燃气的热效应,对于通气空泡的演化机制研究仍不充分。
2) 在强冲击载荷特性及降载方面:以往的研究焦点多关注航行体的轴向过载,但是对于小角度入水情况,航行体的法向过载会异常复杂,甚至比轴向更为突出,当前对强冲击下法向载荷规律的认识仍比较有限,同时应与空泡演化、航行体运动稳定性等建立联系,实现轴向与法向过载的同步降载。
3) 在运动稳定性与流固耦合响应方面:受气水界面和混合流动影响,高速跨介质入水航行体的运动稳定性比水中航行更为复杂,当前对跨介质入水航行体的弹体动力学理论、运动稳定性理论研究非常少见,关于高效增稳方法仍有待进一步发展;对于航行体的流固耦合响应,目前仍需加深对航行体局部和总体响应机理及模式的探索,提出高效能的抗冲击构型理论与设计方法。
4) 在高速跨介质流固耦合研究方法方面:航行体跨介质入水是强冲击、强压缩的多介质、多距离尺度、跨时间尺度的耦合作用过程,当前尚无完备的数值研究方法能够胜任该问题的研究,因此需进一步发展有网格、无网格以及多种方法耦合的数值方法,解决强间断、运动失稳界面、多分辨率耦合等计算难题。在试验研究方面,仍需从强冲击过载、相变空化流动、结构振动及弯折等多个角度,完善缩比模型试验的相似性理论,并通过多尺度的模型试验进行验证,为高速跨介质航行器的构型理论发展和设计、研制提供重要的支撑。