基于反电动势法的直流无刷电机的无感控制应用
2024-03-05张金鸣
张金鸣
(山西大众电子信息产业集团有限公司,山西 太原 030024)
0 引言
传统的无刷直流电机(BLDC)转子位置信息是采用传感器直接检测,在实际应用中电机内部安放的转子位置传感器在某些高温、低温、高振动、潮湿和高干扰等恶劣的工作环境下,由于位置传感器的存在使系统的可靠性降低,且易引入电磁干扰、传感器的安装精度直接影响电机运行性能[1]。所以无传感器驱动使系统能够在恶劣的工作环境下可靠运行,同时使电机的结构变得简单,体积减小、安装更方便、成本降低。
1 反电动势法
1.1 反电动势法控制BLDC的电机控制原理
三相六状态120°通电方式运行的无刷电机定子端一相等效电路如图1,在任意时刻总是两相通电工作,另相绕组是浮地不导通的。这时候非导通绕组的端电压或相电压就反映出该相绕组的感应电动势BEMF。BLDC的BEMF 波形随转子的位置和速度变化,整体上呈现为梯形。

图1 无刷电机定子端等效电路
设UX为对地端电压,UN为星形连接绕组中点对地电压,EX为反电动势,IX为相电流,L为相电感,R为相电阻,(x=a,b,c)。由定子端等效电路可得如下方程式(1):

(1)
假设A、B两相通电,C相关断,则A、B两相电流大小相等,方向相反,而C相电流为零。方程组(1)中的第三式可化简为:
Uc=Ec+UN.
(2)
将式(2)与式(1)中前两式相加可得:
(3)
将式(2)代入式(3)可得:

(4)
由式(4)可知,三相定子绕组的反电势过零点与端电压过中性点在时间上是重合的,因为反电势波形与端电压波形的频率相等,所以寻找反电势的过零点后30°电角度即相当于寻找端电压的过中性点后30°电角度。
1.2 比较器采样过零信号
由于BLDC的Y形连接,相电压无法直接测量只能测量各相的端电压。通常将测量非通电绕组的端电压用于无传感器控制时,称为端电压法,即各相对地的电压,然后与中性点电压比较,当端电压从大于中性点电压变为小于中性点电压,或者从小于中性点电压变为大于中性点电压,即为过零点。
但是一般的BLDC都没有中性点的外接引线,所以无法直接测量中性点电压。解决这个问题的直接办法就是重构一个“虚拟中性点”,通过将三相绕组分别通过阻值相等的电压连接到一个公共点而成,这个公共点就是虚拟中性点[2],如图2所示。将中性点信号和UVW信号通过比较器进行比较获得过零信号。

图2 检测反电势过零点
理论上,过零点总是超前换相点30°电角度。因此在检测到过零点后,要先延迟30°电角度再换相。但是在闭环调速过程中无法预测在检测到过零点后接下来的这30°电角度是多长时间。但是两个换相点之间60°电角度的长度是可以测量的。于是可以采用上一个换相周期,即60°电角度的时间减半作为接下来的30°电角度延时时间。
2 直流无刷电机启动方式
在BLDC低速旋转或者静止时无法检测反电动势,因此需分3步启动BLDC直至检测到稳定的反电动势实现无感控制。三段式启动步骤为:
1) 位置锁定:在保证电流不超过限定值的前提下,将电机任意两相导通一段时间,使转子到达与导通状态对应的位置;
2) 电机加速:位置锁定后按照指定的换相顺序导通功率管,逐渐加快换相频率,同时提高PWM占空比,使电机加速,此时电机处于外同步运行状态;
3) 实现电机运行状态的切换:随着电机转速的升高,可以采集到反电动势时,经过比较器输出高低电平,当检测到的转子位置信号与外同步信号的相位差较小时,切换到自同步运行状态。
3 系统软件设计
本BLDC无感控制软件主要有3个配置步骤:1) 编写基础驱动函数,其中有按键扫描、六步换向组合、启停函数、过零处理函数、换向时间计算函数、定时器中断服务函数。2) 实现固定转子在某一位置,然后以一定的速度按顺序换向旋转,实现方波启动。3) 对过零信号滤波再判断过零信号是否改变,计算换向延迟时间后开始换向。
首先进入主程序中进行系统级别的初始化,其中有库函数、系统时钟和延时函数的初始化,再进行用户级的初始化,包括LED灯和按键初始化、定时器1初始化,进入while循环中检测按键,若按键按下再改变相应的状态值。主程序流程图如图3所示。
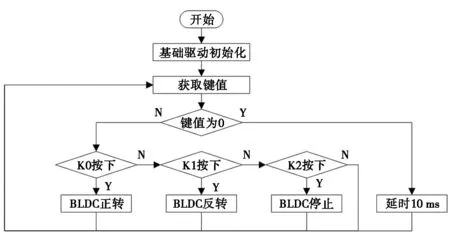
图3 主程序流程图
定时器1中断服务程序中使用switch语句切换工作状态。首先初始状态标志位为0,此时使能旋转的话会进入case0,这时程序默认给UV相通电,实现转子定位,然后下一次进入时切换到case1,经过延迟后切换到case2,在这里将延迟时间递减,实现增频,通过变频函数实现增压,即实现了升频升压法。之后逐渐加速,再回到状态1进行延迟,直至检测到稳定的过零信号,最后切换到状态3,调用过零控制函数实现过零控制。中断服务程序流程图如图4所示。
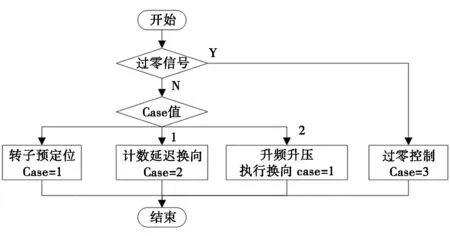
图4 中断服务程序流程图
过零控制函数程序实现了过零信号控制,首先将采集到的过零信号进行滤波,防止换向产生的尖峰电压带来的干扰,接着通过读取过零信号组合值进行换向控制,根据U向过零信号变换时间计算180°电角度的时间,延迟30°电角度的时间再进行换相。这样就实现电机的无感过零控制。
4 实验情况
本实验方案搭载以STM32F407ZGT6为核心硬件电路平台,使用4对极、额定功率350W、额定转速1750转的直流无刷电机。电路中反电势过零信号处理上加入了低通滤波电路,同时软件处理过零信号也加入了一阶滤波函数,这会导致处理器在处理过零信号时产生滞后现象。因此需要根据示波器测量反电势过零信号对软件处理延时换向程序进行调整,最终修改为将延时30°电角度修改为延时18°电角度,此时BLDC转动平稳,反电势趋于梯形信号,如图5所示。从实验结果来看,在BLDC的无感控制中使用反电势法处理过零信号能够准确判断转子过零位置,调整延迟换向角度可以实现控制定子换向时机,使得BLDC旋转平稳高效。

图5 延时18°反电势波形图
5 结束语
本文主要介绍了反电势法的在BLDC无感控制中的应用,同时介绍了BLDC无感控制的启动方式和过零信号处理。这种控制方式能够很好的实现BLDC的无感控制,算法简单,系统稳定性提高,并且硬件电路简单可靠,大大降低了成本。由于BLDC无感控制具有稳定可靠,高效简洁的实用性特点,因此在设计工作中,BLDC的无感控制已成为未来电机控制的主要设计方向。