电动汽车模糊识别制动强度控制设计及分析
2024-03-05郇庆婷冀梦甜
王 雪,郇庆婷,冀梦甜
(1.黄河交通学院 机电工程学院,河南 焦作 454950;2.河南省智能制造技术与装备工程技术研究中心,河南 焦作 454950)
对于电动汽车控制过程来说,复合制动属于一项独特控制模式,可以为制动过程提供更高制动能力,也可以进行收制过程的动能回收,从而获得更长的车辆行驶路程,从而满足复杂工况制动需求[1-2]。
综合运用ABS制动方式时还存在许多缺陷需要克服,并且会引起系统复杂程度的增加,难以满足实车试样要求[3]。进行制动工作模式切换时通常是以车轮滑移率作为判断依据,该方法可有效防止车轮抱死的问题,但设置太小的滑移率切换参数时将会对制动能量的回收造成较大制约,太大时则会影响制动性能[4-5]。此外可以对路面附着系数进行实时监测,由此判断路面实时最佳滑移率,根据以上方式控制滑移率除了可以获得更高制动效能以外还可以更高效回收制动能量[6]。
根据以上研究结果,本文结合不同路面附着系数下的制动强度来实现制动工作模式的切换过程,并在上述切换过程中设置了复合制动模式。以AMEsim/Simulink构建复合制动模型对不同行驶工况开展仿真分析,以此验证复合制动策略的可靠性。
1 复合制动控制
结合制动踏板的信号变化计算制动作用力[7]。通过复合制动的方式使前后轴获得制动载荷,调节车轮电机和机械制动载荷的比例。
利用Simulink构建模糊控制系统,以踏板位移变化率作输入,以制动意图作为输出。利用x表示踏板位移,取值区间[0,1],{VS,S,M,B,VB}是模糊语言变量。利用dx代表位移变化率,取值介于[-10,10],在{NB,NM,NS,Z,PS,PM,PB}范围内进行模糊语言选择。设置制动意图区间[0,3],将其表示成YITU,将模糊语言变量设定成{S,M,B}。以Z代表制动强度,对应区间是[0,1],设置模糊语言变量{VS,S,M,B,VB},建立三角函数计算隶属度。根据表1参数设置模糊推理规则。
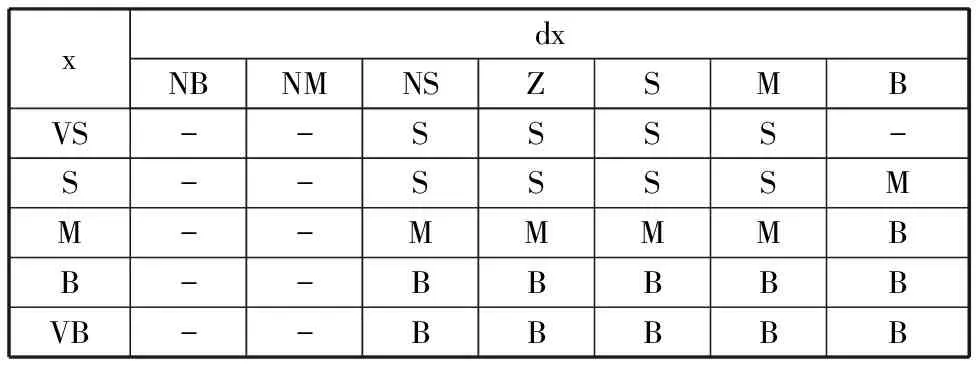
表1 制动模糊推理规则表
将制动过程分成常规和复合两种制动方式。其中,常规制动方式被用于传统车辆,只提供液压控制与ABS两种工作模式[8]。选择制动模式需根据制动载荷、转向角、路面附着系数进行综合分析[9]。再根据阈值判断车辆的转向情况。如果车轮转角低于阀值参数可推断车辆处于直线运行状态;如果转角比控制阀值更大时可以判断车辆处于转向过程中。在车辆产生转向偏差的情况下,可利用差动制动方式来获得更稳定的转向控制效果。
当汽车沿低附着路面行驶过程中发生转弯时,较易出现与原行驶轨迹之间的偏差[10]。为确保汽车能够实现稳定转弯过程,通过差动调节实现可靠的转向控制目标,并依据轮胎的滑移率分析不同的转弯方向。
2 构建仿真模型
为本测试系统设置以下参数:满载800 kg;轴距离2.5 m;质心坐标0.576 m;前轴相对质心的间距保持1.42 m;后轴与质心间距1.16 m;控制电机运行过程的额定功率2 kW,峰值功率9 kW。
通过MATLAB/Simulink来共同构建制动模型,利用AMEsim进行复合系统运行控制。图1是建立得到的仿真模型。
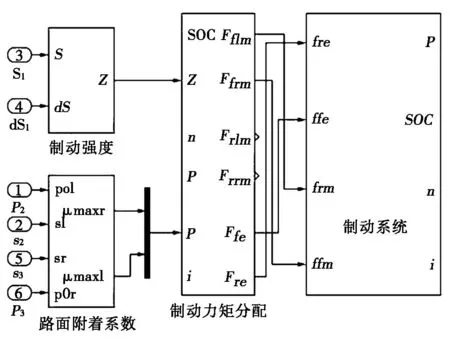
图1 联合仿真数学模型
3 仿真分析
3.1 对开路面制动仿真
进行仿真测试时将路面左、右侧附着系数依次设定在0.2与0.7,初始速度8.2 m/s,再控制制动强度为0.35,到达2.6 s时车速降为0。在上述强度下实施制动控制时,保证时间为安全范围,测试结果见图2与图3所示。

图2 滑移率曲线
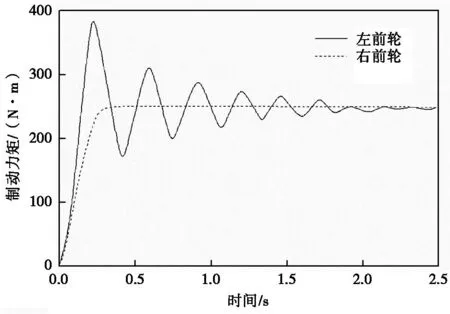
图3 制动力矩曲线
根据以上测试结果可以明显发现,左右侧车轮保持同样的制动力,而滑移率则存在显著区别。这主要是由于左侧路面的附着系数较小,需通过ABS系统进行控制来获得最优滑移率。右侧路面具备更大附着系数,不必对滑移率进行调节便可使其达到很低的程度。
3.2 转弯工况制动仿真
对附着系数为0.4路面仿真,控制转弯速率为20 m/s,图4是对前轮转向角测试结果。根据图4可知,前轮转向角呈现持续上升趋势,并在3 s附近达到15°,之后保持稳定转向角,基本接近15°。
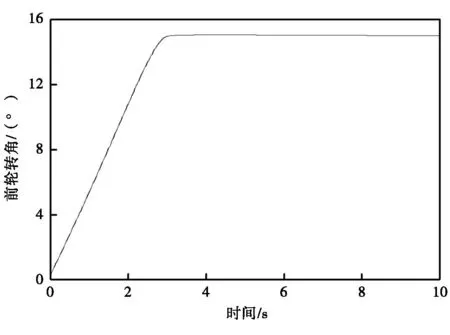
图4 前轮转角
图5给出了左后轮仿真测试得到的滑移率结果。图6则是不同条件下的横摆角速度曲线。图5是对调节前后的左后轮滑移率测试数据。控制左后轮达到更小滑移率和制动载荷,确保获得与目标横摆角速度相近的实际值。根据图6可知,横摆角速度的实际值跟前轮转角之间呈线性变化。根据左后轮滑移率,适当减小制动力矩,获得接近目标值的横摆角速度。
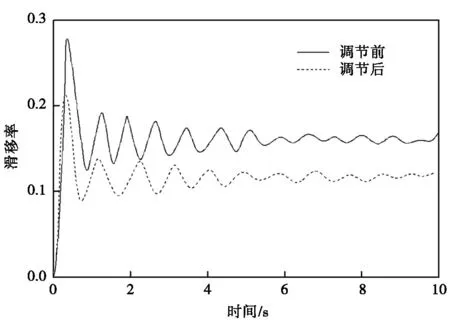
图5 左后轮滑移率

图6 横摆角速度曲线
4 结论
本文设计了电动汽车模糊识别制动强度控制,并开展对开路面和转弯工况制动仿真分析,取得如下有益结果:
1) 对开路面制动仿真得到,到达2.6 s时车速降为0,确保时间处于安全区间内。左右侧车轮保持同样的制动力,滑移率则存在显著区别。
2) 转弯工况制动仿真得到,前轮转向角呈现持续上升,并在3 s附近达到15°,之后保持稳定的15°转向角。通过减小左后轮滑移率与制动力,获得与目标横摆角速度相近的实际值。
