基于物联网的隧道通风控制系统的研究与设计
2024-03-04苗荣霞李洁馨
苗荣霞,张 洋,李洁馨,王 幸
(西安工业大学电子信息工程学院,西安 710000)
1 引言
在隧道通风控制中,一氧化碳浓度和烟雾浓度是两个主要监控对象。汽车行驶过程中排放的一氧化碳若不及时排出隧道,过高的浓度会使司乘人员头晕恶心;同样,汽车高速行驶卷起的尘埃若不及时排出隧道,也会影响驾驶人员的视线。二者皆会造成严重的行车隐患,严重威胁车内人员的人身安全。为实现安全驾驶,保障通行人员的健康,必须提供充分的隧道通风[1]。目前大多数隧道通风采用分档控制、PID 控制和模糊控制。分档控制根据各个时间段最大车流量通行产生的污染物浓度确定风机的开启数量。由于隧道通行日夜不间断,大多数风机持续满负荷连续运转,在造成电能的浪费的同时也会造成风机损耗,缩短使用年限。传统PID 对风机变频器进行控制,由于污染物浓度的变化有大惯性、非线性、强耦合性等特点,会导致输出超调与振荡。模糊控制可以解决隧道环境复杂、难以建立准确数学模型的问题,但也存在超调量大、调节时间长等问题[2]。针对现有方法的诸多问题,在此尝试构建“互联网+隧道通风”,对被控对象进行实时监测[3]。由于污染物的测量、数据的传输以及主控制器根据浓度做出决策与开启风机都需要一定的时间,会导致控制的滞后性,故此提出LSTM 交通流预测算法,通过预测下一时间段的交通流量判断污染物的未来趋势,提前对风机进行开启,并用模糊PID 智能控制算法对风机进行精确控制,以降低运营商的耗能成本。
2 公路隧道通风控制系统框架
隧道通风控制系统主要是通过传感器测量隧道内的污染物浓度,将各个测量点的数据传输至主控制器。主控制器根据污染物浓度决策风机的开启数量,同时通过PLC 云网关将数据上传至云平台。另一方面,通过以太网通讯与上位机触摸屏连接,上位机可以作为现场设备对污染物的浓度进行直接监测,并能对风机的开启状态、风机的运行频率以及被控变量的设定值做出实时更改。系统结构图如图1 所示。
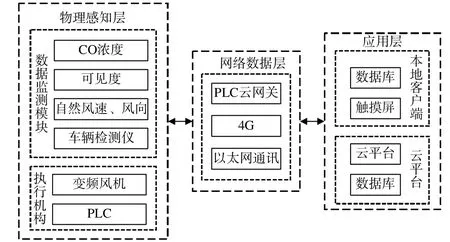
图1 隧道通风控制系统结构框图
其中,感知层是整个控制系统的基础层,主要包含数据监测模块和执行机构两部分。使用传感器对隧道内的环境信息进行采集,由执行机构根据主控的决策对通风设备进行控制[4]。
网络数据层是物理层和应用层的数据通道,实现两者之间的数据传输和控制指令的传达。目前可以采用的通讯方式主要包括LAN 网口、光纤通信、GPRS/4G 等。
本系统利用交换机将PLC 组成环网结构,将从机的数据采集至主机,将主机的网线连接至USRPLCNET210 网关的LAN 口,利用USR-PlcNet 软件对网关进行参数设置、网关添加,实现PLC 的远程调试以及程序的上载、下载。
应用层作为整个系统的控制中心,主要将隧道内采集的数据进行显示与保存。本系统利用云平台进行添加变量与组态设计。利用PLCNET210 将主站采集的数据上传至云平台,用户可以直接登陆网站进行数据查看,各节点污染物浓度一目了然,也可查看历史数据,如图2 所示。研究人员可以根据历史数据以及各节点数据的变化趋势对控制策略进行优化。

图2 数据查看界面
利用组态软件对隧道进行简单组态,将变量与各节点的传感器进行关联,如图3 所示。组态可直观显示隧道各节点的污染物浓度和风机频率,当某处传感器或者风机出现故障时,该位置变量将会以闪烁的形式提醒运营商及时对故障进行处理,以免造成更大的损失。

图3 云平台组态操作界面
3 LSTM 预测算法
3.1 算法结构
LSTM(Long Short-Term Memory,长短期记忆)由记忆单元、遗忘门、输入门和输出门构成,算法结构图如图4 所示。其中,记忆单元是LSTM 的核心,用作长期记忆的传送带,用C 表示。输出门的输出值h 可当作当前时刻的短期记忆。因此LSTM 具有长短期记忆能力[5]。
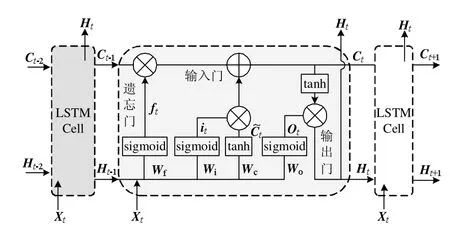
图4 LSTM 算法结构图
在这一结构中,遗忘门的主要功能是接受上一时刻传输的长期记忆Ct-1,并且根据遗忘因子ft决定遗忘掉Ct-1中的无用信息[6]。遗忘因子的定义可如下式表述:
式中,σ 表示激活函数sigmoid;Wf表示遗忘门的权值矩阵;[Ht-1,Xt]表示两向量的纵向连接操作;bf为遗忘门输入的偏置项。
输入门的任务是确定新输入的信息中哪些被存放到当前时刻的Ct中,有下式:
式中it表示记忆因子;Wi和bi分别表示输入门的权值和偏置;C~t表示新的候选值向量;Wc和bc分别表示记忆单元状态的权值和偏置。
记忆单元状态不是一成不变的,要根据每个时刻的输入进行更新,目的是保证对长序列数据的充分学习,有下式:
输出门的任务是根据当前的记忆单元状态,控制当前时刻的所有信息中有多少可以作为输出值,即计算当前时刻的短期记忆Ht,有下式:
式中:ot表示输出门的输出信息;Wo和bo分别表示输出门的权值和偏置。Ht也代表了当前时刻LSTM层的隐藏状态。
3.2 构建数据集
选取某路段一段时间的交通量,时间间隔为5分钟。共有数据150 个,选取120 个作为训练集,剩余30 个作为测试集。部分数据如表1 所示。
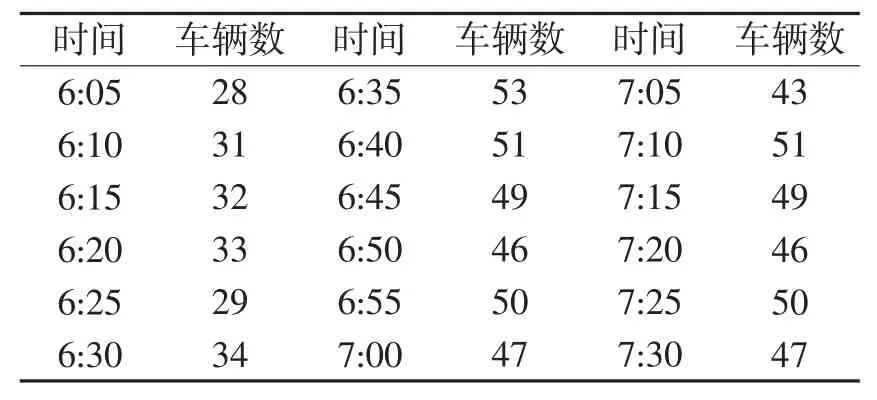
表1 部分训练数据集
从中得出均方根误差:
均方根误差RMSE 表示预测值与真实值间的偏差,取值范围为[0,+∞),该值越小表示预测效果越好。在训练过程中,对LSTM 模型的隐藏层级、隐藏层神经元数目、学习效率等参数进行寻优,同时观测在不同参数设置下模型评价指标RMSE 的变动状况,从而据此选取出使RMSE 取值变化最小的参数,即为最优设置参数。
LSTM 预测模型具体参数设置如表2 所示。根据表中各参数对预测模型做出调整,对数据进行训练和测试,得到训练集预测结果图如图5 所示。
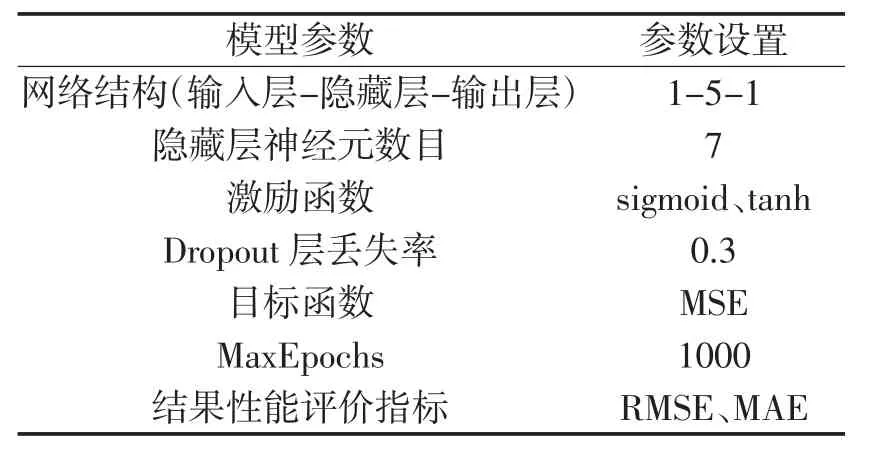
表2 LSTM 预测模型参数表
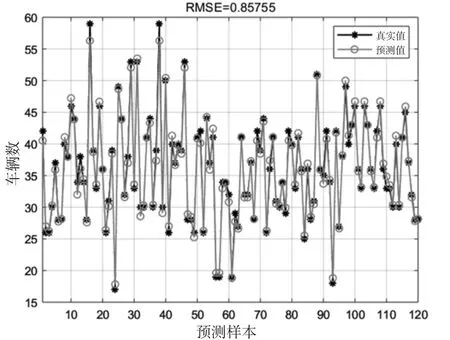
图5 LSTM 模型训练集预测结果对比
如图所示,预测值与真实值两者曲线接近重合,预测效果良好。
对模型的训练结果进行指标运算,得到RMSE值为0.85755;平均绝对误差MAE 值为0.71434;平均绝对百分比误差MAPE 值为0.2603%。从MAPE值来看,模型的误差较小,预测精度较高,表现出了良好的训练效果。
同样对测试集进行训练和测试,得出结果对比曲线如图6 所示。
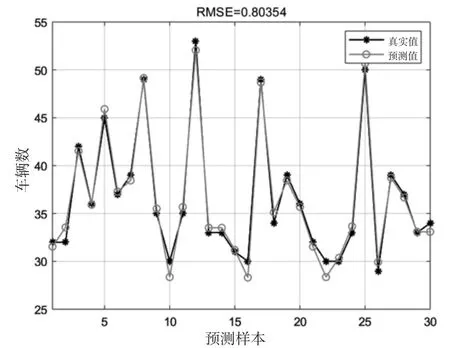
图6 LSTM 模型测试集预测结果对比
由图中曲线可见,测试集的拟合效果相对训练集较差,真实值相对于预测值有一定的滞后性,但是整体效果良好。对模型的预测结果进行定量计算,得到RMSE 值为0.80354,表示预测结果误差较小;MAE 为0.56302;MAPE 值为0.1802%。从MAPE 这个值上来看,相比于训练集,测试集的预测精度更高,表现出良好的训练效果。
3.3 污染物增量模型
在隧道入口处前放置车辆检测仪,将通行车分为大型车和小型车,根据采集的数目依据上述模型分别预测下一时间段的大型车和小型车的车流量预测值。车流速度假设为隧道设计车速[7]。
该模型主要用于预测未来一段时间的污染物趋势。根据LSTM 预测的大型车和小型车的数量求二者污染物排放量的总和。定义隧道总空间w 为:
式中,S 为隧道通风截面积;L 为隧道长度。
结合已得到的预测结果,一氧化碳增量为:
式中,Nz为大型车预测车辆数;qCO1为大型车隧道设计车速时的平均一氧化碳排放量;Nq为小型车预测车辆数;qCO2为小型车隧道设计车速时的平均一氧化碳排放量。
4 算法仿真研究
4.1 控制对象数学模型
当风机启动时,隧道内的气压保持不变,将此过程看成滞后环节;当风机工作一段时间之后,隧道内的压力逐渐稳定在设定值,将此环节看作一阶惯性环节。压力的数学模型为一阶纯滞后惯性环节[8-11]:
将隧道内一氧化碳浓度变化看作一阶纯滞后惯性环节,如下式:
式中,K1、K2为静态增益;T1、T2为惯性常数;τ t1、τt2为滞后时间。在此,设置K1=3、K2=6;T1=2、T2=3;τt1=2、τt2=1。
综上可得本系统中隧道内一氧化碳通风量控制对象的数学模型为:
根据实际情况,目标隧道采用纵向通风,可以对交通风和自然风充分利用[12],节约能源。
4.2 基于模糊PID 控制算法及其仿真
由于隧道环境的特殊性,且多因素相互耦合,系统难以获得精确的数学模型。模糊控制普遍用于复杂控制领域,用以解决无法建立精确数学模型的问题。传统的PID 控制算法性能较好,但是难以适应干扰多、控制复杂的系统。在此利用自适应模糊PID控制算法,结合模糊控制规则和PID 控制,对PID参数不断调整。算法结构如图7 所示。

图7 模糊PID 控制算法结构图
自适应模糊PID 控制算法在原参量基础上,由反馈偏差值和误差变化率经过模糊控制器,输出△KP、△KI、△KD,共同对PID 参数进行整定。为简化模糊化过程,将浓度误差E 和浓度误差变化率EC分成NB、NM、NS、Z、PS、PM、PB 共7 个隶属度等级,如图8 所示。

图8 输入量隶属度函数
其输出△KP、△KI、△KD隶属度也分为7 个等级,如图9 所示。

图9 输出量隶属度函数
根据隧道环境的变化,根据输入误差E 以及误差变化率EC制定模糊控制规则,共计49 条。采用Mamdani 推理法进行模糊推理,采用重心法解模糊化。最终得到的控制规则如图10 所示。
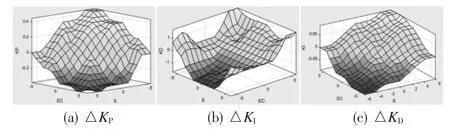
图10 模糊PID 控制规则曲面视图
模糊PID 是根据模糊规则对PID 参数进行不断优化,以克服传统PID 参数无法实时调节的缺陷。通过传感器采集的污染物浓度,确定污染物浓度与设定值的误差E 以及当前误差和上次误差的变化EC,根据模糊规则表进行推理。模糊控制器输出的△KP、△KI、△KD与原PID 的参数共同对风机进行控制,以便及时排出污染物。控制规则如表3 所示。

表3 系统模糊规则表
4.3 仿真比较
隧道环境具有滞后性、强耦合性、时变性等特点。模糊控制不用创建精确的数学模型,且抗干扰能力强、容错力高;PID 控制算法能快速适应隧道复杂环境。结合二者优点,对隧道一氧化碳调风量进行建模。分别用模糊控制、传统PID 控制和自适应模糊PID 控制三种控制算法对隧道通风进行控制仿真。仿真结构如图11 所示。
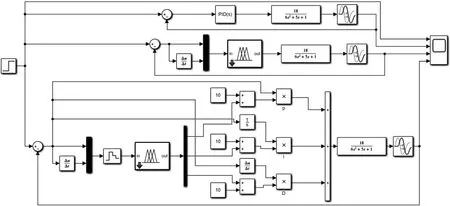
图11 Simulink 仿真结构
给系统一个阶跃函数,输出值设为1,系统在三种不同控制方式下的响应曲线如图12 所示。由图中可知,模糊控制不仅响应慢,调节时间也长达21.37s,超调量高达21.9%,不适合单独用于隧道通风系统。传统PID 控制算法的响应时间、调节时间以及控制效果相对稳定,但其超调量超过10%。相比之下,自适应模糊PID 控制系统的最大超调量仅为4%,系统从初始状态达到稳定状态的超调量仅为6.71s。
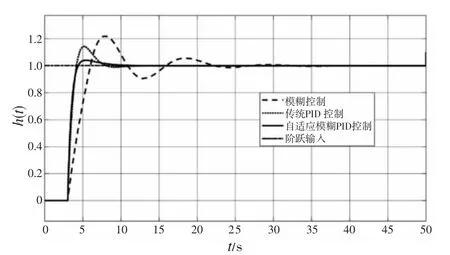
图12 三种控制算法阶跃响应
为反映隧道环境复杂且易受外界影响的情况,在第50s 加入10%的干扰信号,加入干扰信号后各算法的阶跃响应表现对比如图13 所示。
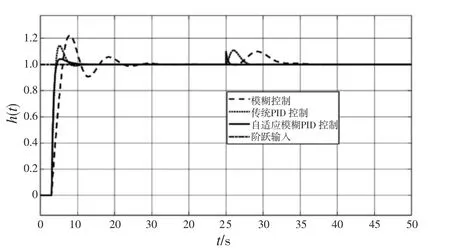
图13 加入10%干扰信号后阶跃响应对比
由图13 可见,模糊PID 控制效果最好,在2.13s内即可使系统再次达到稳态;传统模糊控制的调节时间最长;PID 算法的调节时间适中,但其超调量在三者中最大,已达10.7%。三种智能算法的阶跃响应情况对比如表4。由此可见,模糊PID 控制算法能够有效缓解隧道通风耗能大的问题,并有助于避免模糊控制和传统PID 控制超调量大、控制时间长,以及其他对隧道环境影响较大的问题[13]。

表4 三种控制算法阶跃响应比较
5 结束语
研究围绕隧道通风耗能问题进行,利用物联网对隧道污染物浓度进行实时监测,提出基于LSTM交通流预测的模糊PID 控制算法。利用交通流预测算法对交通流进行预测,根据预测的车辆数目、车型等计算下一时间段的污染物浓度增量,计算需风量以提前对风机进行控制。利用模糊PID 控制算法对变频风机进行更精确的控制。模糊PID 控制相比于模糊控制和PID 控制超调量小、调节时间短且在加入干扰后也能短时间内达到稳态,满足系统实时控制要求。与传统隧道通风控制系统相比,表现出了提前预测、及时反馈、可靠控制和管理高效等优点。
