自动化地面激光扫描仪校准实验室构建与应用
2024-03-04施晓勇黄昌狄周忆宁
徐 建,施晓勇,黄昌狄,周忆宁
(1.浙江省测绘科学技术研究院,浙江 杭州 311122)
目前,对于地面激光扫描仪的参数评定大多是从某一方面进行评定[1-4],缺乏整体性,有的校准装置过于简单[5],不够科学严谨、费时费力。近年来,相关学者对地面激光扫描仪开展了精度评价及校准研究,徐寿志[6]等利用比长基线检定场、多齿分度台等对三维激光扫描仪开展精度评定工作。刘胜男[7]等基于仪器、外界环境、目标等误差源,对仪器测距和测角精度进行了评定。但是,当前研究中多致力于仪器精度评价分析,鲜有学者基于仪器校准技术流程,整合相关硬件及软件,开展自动化地面激光扫描仪校准实验室的构建及应用研究。因此,本文提出的基于相关标准校准流程,开发、整合软硬件实现地面激光扫描仪的自动化校准[8-9]具有一定的社会及经济效益。
1 实验室框架
地面激光扫描仪校准实验室是一个集软硬件一体化的高效、科学的自动化实验室。
实验室包含硬件设备和配套软件两部分。硬件设备主要包含径向距离校准装置和空间距离校准装置,分别如图1、2组成。

图1 径向距离校准装置
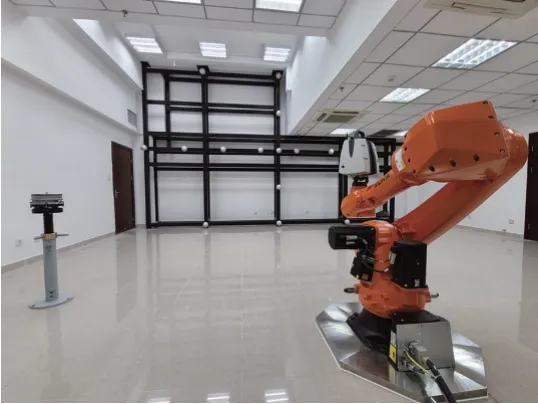
图2 空间距离校准装置
配套软件主要包含测绘仪器检定信息管理系统、径向距离示值误差记录器、空间距离示值误差记录器、机械臂控制软件、出证终端软件等。
径向距离校准装置:以双频激光干涉仪为主标准器,配合大长度自动化检测平台提供精确的基准值,平台上球型标靶的球心提供唯一的空间位置,实现径向距离示值误差、径向重复性和标靶重复性的校准。
空间距离校准装置:装置由三维靶球墙和机械臂等组成。三维靶球墙作为主标准器提供空间标准值,机械臂代替传统观测墩提供多姿态空间观测位置,实现空间距离示值误差的校准。
校准装置基于JJF1406-2013《地面激光扫描仪校准规范》的要求,实现对扫描仪距离精度、点位精度的科学、准确、高效地评定。此外,实验室新增距离精度、点云密度、点云精度、角度标准偏差、补偿器补偿误差和平面模型精度[10-11]的检测项,用于相关计量检测科学实验及研究以提升技术服务能力,并为后续校准规范改版夯实技术基础。
数据处理流程如图3 所示,校准人员按照《地面激光扫描仪校准规范》的要求操作扫描仪对校准装置进行扫描,获取原始数据,利用扫描仪配套软件解算原始数据得到点云数据,采用扫描仪配套点云数据后处理软件对标靶点云进行球心拟合,得到标靶球心坐标,结合外部标准值计算校准结果。
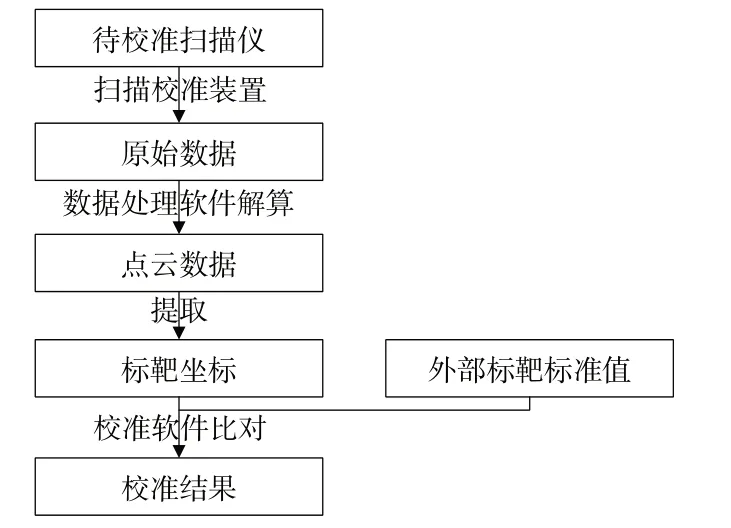
图3 数据处理流程图
2 径向距离校准装置
实验室主要由径向距离校准装置和空间距离校准装置及相关配套软件构成,径向距离校准装置的构成及相关配套软件如下。
2.1 装置构成
径向距离校准装置以室内大长度自动化检测平台(平直度优于5×10-5)为基础,在其移动平台上增加可以安置球型标靶的过渡装置,配置1 个球型标靶(表面喷砂处理的铝制品,直径200 mm,直径变化量≤0.1 mm)、1 个反射板(哑光处理,平面度≤0.2 mm,长200 mm,宽300 mm),结构如图4。双频激光干涉仪安置在大长度平台的一端作为该装置的主标准器,提供标准距离值。其线性位移示值误差≤0.5×10-6L(单位为m)。
将球型标靶安置在大长度平台的置镜系统上,在直线导轨一端的观测墩上安置扫描仪,调节扫描仪的位置和高度,使其中心大致处于标靶中心运动轨迹的延长线上。扫描仪至标靶的初始位置大约2 m,标靶沿导轨按预先设好的程序自动移动到不同测量位置,共计6个测量位置,每次移动距离5 m。
2.1.1 配套软件
径向距离校准装置配套软件为径向距离示值误差记录器,主要实现径向距离示值误差、径向重复性、标靶重复性和平面模型精度等校准项目的一键自动化计算及电子版原始记录册的自动生成并上传至数据库。避免了手工计算、简化了操作流程,代替了传统人工纸质化记录、计算的工作流程。
软件信息区域实现检测编号与仪器的型号、编号、类型及厂家和送检单位信息的关联,避免了反复多遍的手工填写。标准器的名称、证书编号和存放地点的信息都可以实现一键关联。控制区域可自行设置小车移动距离和移动速度,主要用于小车上的置镜系统在轨道上自动向前或向后运行。摆脱了人为的手工操作,既减少了检定员的体力工作又增加了球型标靶的移动精度。显示区域主要实现了双频激光干涉仪的自动读数和保存,即标准值的自动存储。同时,通过Fluke 和温度传感器可以实现对标准值的自动温改修正,提高了标准值精度。操作区域可以实现球心坐标的自动拟合及校准数据的一键计算,并自动生成电子版原始记录册上传至数据库,避免了繁琐的手工记录、计算。
2.1.2 空间距离校准装置
空间距离校准装置的构成及相关配套软件如下:
1)装置构成。空间距离校准装置由三维靶球墙(测量范围为0.5 ~7 m,U=0.087,K=2)、球型标靶(表面喷砂处理的铝制品,直径150 mm,直径变化量≤0.1 mm)、温度传感器(精度0.2℃)、机械臂(重复精度<0.1 mm,臂展2 101 mm,负载70 kg)、多齿分度台(分度误差0.3″ )组成。三维靶球墙作为该装置的主标准器,提供空间距离的标准值,并且使用机械臂代替了观测墩,预先开挖基坑并浇筑好钢筋混凝土基础,将机械臂安置在上面,确保了机械臂在最大臂展和负荷状态下的稳定性。
校准规范中规定空间距离校准装置沿水平和垂直方向标靶数均不少于4,且保证与扫描仪构成角度不小于60°×60°(水平角α×垂直角β)。将扫描仪安置在3 个不同位置,应满足其至标靶距离大于最小测量距离,在不同位置将扫描仪头部大致旋转120°,同时改变仪器高度,分别对垂直平面内各个标靶进行扫描,并拟合标靶球心坐标。由图2 可知,实验室沿水平和垂直方向的标靶数分别为5 个和8 个,并且用机械臂代替了3 个观测墩,既满足了规范要求,又可以实现空间任意观测位置,提高解算精度。
三维靶球墙和球型标靶提供稳固的空间位置及多类型的空间距离。温度传感器监测三维靶球墙所在的环境温度,并且计算温度引起球型标靶变化的不确定度分量。机械臂提供空间任意观测位置,并提供倾斜角度值。多齿分度台提供精确的基准角度值。
2)配套软件。空间距离校准装置配套软件包含空间距离示值误差记录器、机械臂控制软件、出证终端软件等,软件的主要情况如下:①空间距离示值误差记录器主要实现空间距离示值误差、点云精度、水平角标准偏差、竖直角标准偏差、补偿器补偿范围/补偿误差等校准项目的一键自动化计算及电子版原始记录册的自动生成并同时上传至数据库。②机械臂控制软件通过KUKA端和PC端建立机械臂和控制软件间的连接。以单步控制或六轴联动方式移动到指定位置,并保存对应坐标。在后续校准过程中,只需通过对控制软件将机械臂自动运行到预设位置即可。利用机械臂替代传统观测墩,既满足校准规范要求的3 个不同观测位置,又提供了多姿态的精密观测位置作为解算约束条件,提高解算精度。同时,经检测机械臂在负载情况下,位置重复性精度小于0.1 mm,保证了仪器精度检测的准确性及可靠性。此外,机械臂的应用避免了传统观测墩反复拆装仪器的步骤,减少了仪器拆装风险并提高了工作效率。③出证终端软件可按仪器送检时间以及仪器类型快速定位待出证仪器,并基于校准过程中记录器生成的电子版原始记录册,自动匹配数据库中原始数据实现对校准仪器的一键自动化出证,并同步显示仪器校准状态,完成核验、批准流程,操作过程简单、高效。
3 结 语
本文建立了径向距离校准装置和空间距离校准装置并开发了相关配套软件,实现了校准数据自动化采集与计算、主标准器温度实时采集并计算改正、校准数据库的构建,并以自动化机械臂替代传统观测墩。最终,构建了自动化地面激光扫描仪校准实验室,为地面激光扫描仪提供了全自动的数字化校准服务,实验室的建立提高了仪器校准效率,保证了仪器校准的时效性。