技术机会视角下的研发合作伙伴识别与选择研究*
2024-03-02王金凤李阿丹冯立杰
王金凤 李阿丹 冯 健 冯立杰 程 璐
(1.上海海事大学中国(上海)自贸区供应链研究院 上海 201306;2.上海海事大学经济管理学院 上海 201306;3. 上海海事大学物流科学与工程研究院 上海 201306 )
0 引 言
现代科学技术的飞速发展,伴之经济社会对科技创新的需求日益迫切,创新技术机会的识别与研发对企业而言益发显得重要[1,2]。但囿于资源所限,众多企业往往选择合作研发方式以最大化利用自身有限的资源实现对新技术的获取,进而借助互补信息和资源实现利润的最大化[3]。
进一步的,相较于企业自主研发,合作研发不仅可以促进企业与合作伙伴间实现优势资源共享,弥补自身研发能力的不足,而且可以分散因技术创新所带来的不确定性风险。所以,对研发合作伙伴的识别和选择是企业的一项重要发展战略[4,5]。
对此,众多学者聚焦于研发合作伙伴的识别和选择,分别就基于调查数据[6]、论文数据[7]、专利信息[8]等,采用SAO分析[9,10]、关联规则挖掘[11]、SimRank算法[12]等方法,结合指标评估和领域专家意见,进行了潜在合作伙伴选择问题的研究。众多学者提出的诸多较为成熟的定量方法[13],使得系统全面预判技术创新机会成为可能,为本文提供了重要的参考思路,但仍存在一些需要深入探讨的问题:
现有的专利合作研究主要集中在特定技术领域,通过构建专利合作网络,揭示网络整体结构、创新主体位置和特征以及网络中合作演化等内容,旨在整合专利合作过程中的创新资源。然而,这些研究较少从技术机会的角度对潜在的专利合作伙伴以及专利合作机会进行深入探讨。技术机会视角强调的是能够预见未来创新机会和市场趋势的能力,可以根据这些预见来制定和规划未来的专利合作战略。基于这种视角进行的研究将关注如何预见潜在的合作伙伴、专利技术以及专利合作机会,从而触发创新过程,促进创新资源的集成和创新能力的提高。
有鉴于此,本文在汲取前人研究成果基础上,提出了一种基于GTM(Generative Topographic Mapping,GTM)的研发合作伙伴识别和选择方法。首先,收集相关专利数据并进行数据预处理;其次,基于GTM方法将专利信息进行可视化表达并生成专利地图,通过逆映射识别具象领域的潜在技术机会;然后,通过技术匹配度分析目标企业与技术机会之间的联系,以筛选候选合作伙伴;最后,构建基于技术能力和技术集中度的竞争力组合图,以评估和选择候选合伙伙伴。本文所提出的方法能够帮助企业从潜在技术机会视角出发,客观寻找合适的合作伙伴以提升研发效率,进而为企业高效开展协同创新提供可资借鉴的决策理论支持。
1 文献综述
1.1 有关技术机会识别问题的研究
技术机会意味着技术进步的可能性,技术机会发现作为一种技术预测手段,可以探索技术发展方向和评估技术发展风险,从而为行业或者公司提供重要参考价值。专利地图作为一种有效的分析工具,可将某领域专利的所有关系进行可视化表达并以直观的方式帮助专家识别有效信息。因此,通过专利数据开发专利地图并可视化关键信息是探索技术机会的可靠方式。GTM专利地图通常被用来识别已有专利的技术真空以研判该技术领域的创新机会[14-15],技术真空表征了技术领域中的潜在技术机会,继而可经由识别的技术真空聚焦技术机会找寻合适的合作伙伴。
作为一种基于贝叶斯理论的降维分析方法,利用GTM能够将多维专利数据自动映射至由网格构成的二维地图,进而通过逆映射算法提升对专利真空识别与解释的客观性。
对此,Son等[16]通过构建光刻技术的GTM专利地图自动识别了该领域的专利真空,以高效发现新的技术机会;Yoon等[17]利用形态分析法融合GTM识别了LED灯温控领域的专利真空,在研判技术机会的同时搜寻了潜在的合作伙伴;Yoon和Magee[18]利用GTM逆映射函数关键词解释了识别的3D打印技术机会,并筛选出了具有开发前景的技术真空;Teng等[19]利用文本挖掘技术结合K-means算法完成了对质子交换膜的专利数据关键词提取与聚类,同时运用 GTM进行了数据降维以形成二维专利地图自动识别了专利真空,完成了对该技术领域创新机会的识别。此外,已有相关文献还利用GTM对技术商业化机会[20]和商业模式创新机会[21]进行了预判。
然而,利用GTM逆映射识别的技术机会大多以关键词或IPC形式呈现,对细节的解释性较差,而DMC(Derwent Manual Codes)相较IPC而言更能体现出具象领域的技术特征,并且相较关键词的粗粒度呈现,蕴含着更加丰富的技术实现细节语义信息。
因此,本文将在构建GTM专利地图基础上,通过识别具象技术领域的技术真空,为细粒度指导企业识别潜在技术机会提供科学的参考思路。
1.2 有关研发合作伙伴选择问题的研究
现有关于研发合作伙伴选择问题相关的文献主要集中在选择方法与评价指标两个层面。
针对研发合作伙伴选择方法的研究中, Wang等[9]利用SAO语义分析方法,归纳总结了根据目标或解决方案的相似性确定研发合作伙伴的流程;崔晶等[11]在利用关联规则方法挖掘目标企业的同心多元化技术领域基础上,根据专利授权量排名确定了相关领域的潜在合作伙伴;李冰等[12]通过构建企业-专利异质性网络,利用基于SimRank指标的链路预测算法进行了合作伙伴和竞争对手的研判。
而针对研发合作伙伴选择指标的研究中,如利用调查法确定合作伙伴的定性选择标准为之提供了丰富的多元评价指标[22],包括研发目标的兼容性和技能的互补性[23]、技术的相关性和先验性等[24]。与此同时也存在信息来源范围有限、衡量标准过度依赖领域专家使主观客观性不足等问题。对此,Geum等[25]根据科学出版物和专利的文献计量及引用信息设计了14个指数,用以搜索和评估合适的研发合作伙伴;吴菲菲等[26]通过分析网站和专利等多源数据库并基于Topsis法,利用技术能力、合作能力和市场能力等3项指标,从量化角度研究了如何选择最优的研发合作伙伴。
上述研究均为本文提供了重要的参考思路。然而,其中存在的较少兼顾具象领域技术机会,而且受限于领域专家的主观性判断,可能使企业错失更为合适的研发合作伙伴。
因此,本文将在利用GTM挖掘专利数据、识别具象技术领域潜在技术创新机会的基础上, 通过与目标企业的技术匹配度分析及指标评估,筛选出合适的研发合作伙伴,为企业高效开展技术研发提供科学的参考思路。
2 研究设计
本文基于GTM进行研发合作伙伴的识别与选择主要包括以下4个步骤:首先,从相关数据库收集专利信息,经清洗后提取DMC并构建专利-DMC矩阵;其次,绘制GTM专利地图以识别潜在的技术机会,确定目标合作技术;然后,评估目标合作技术的可实现性,分析其与目标企业的技术匹配度以获取候选合作伙伴清单;最后,对候选合作伙伴进行评价,最终得到所选择的研发合作伙伴。具体步骤如图1所示。

图1 研发合作伙伴识别和选择流程图
2.1 数据收集及预处理
首先,从Derwent数据库中检索相关专利并提取DMC和专利申请人信息。因为在专利文献中,每件专利均至少拥有一个DMC表征其外部特征和应用领域,所以,从收集的专利完整记录中提取DMC旨在按照其出现的频率进行优先级排序。
其次,根据领域专家意见,剔除不相关的DMC后构建专利-DMC矩阵。因为专利-DMC矩阵由二进制数字组成,所以,如果该DMC未在专利中出现为0,反之为1,进而可构建专利-DMC矩阵(见表1)。

表1 专利-DMC 矩阵
2.2 潜在技术机会识别
首先,通过GTM对专利-DMC矩阵数据进行可视化表达,即将复杂的多维数据映射至二维专利地图,进行或已有专利或技术真空的直观反映[16]。在绘制的GTM专利地图中,“○”代表该单元格已被占用,通过逆映射计算可以定位至专利数据;专利地图中的空白区域即技术真空。其示例如图2所示。
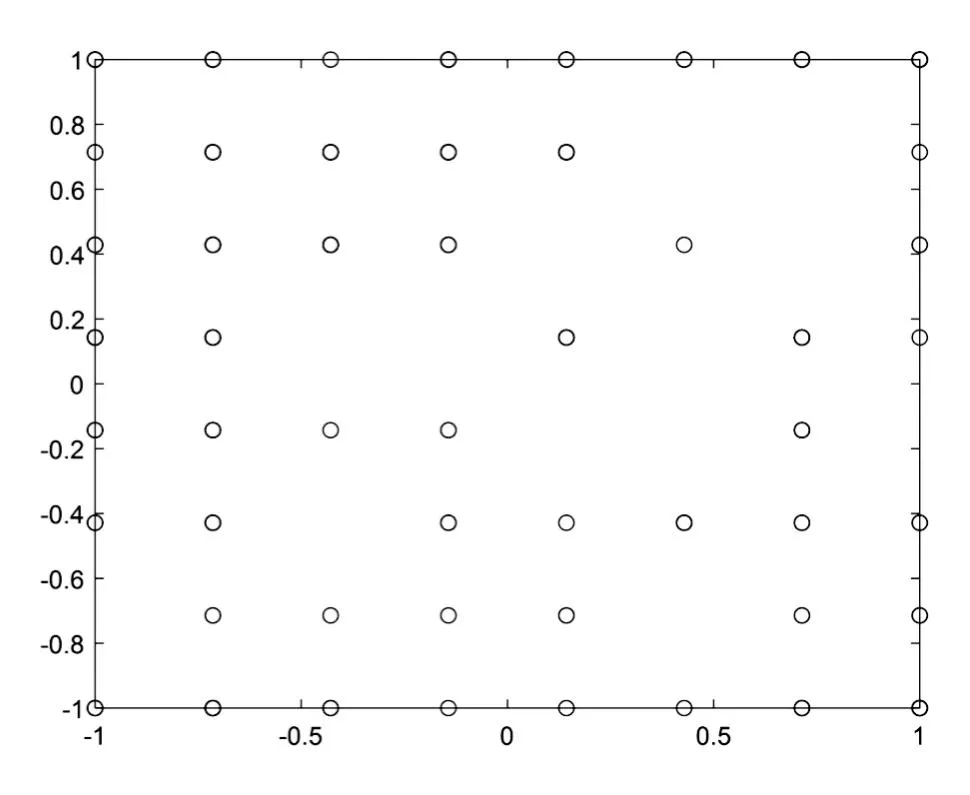
图2 GTM专利地图示例
其次,在GTM运算过程中还需确定系列模型参数。包括:基函数的数量、基函数的宽度、潜在空间网格上的样本点、权值正则化因子和重复迭代次数[27]。一般而言,这些参数可以通过敏感性实验确定,进而绘制GTM专利地图以识别具象领域的技术真空,通过逆映射得到技术真空对应的DMC向量[27]。其逆映射向量的具体计算公式如下:
y(x;W)=Wφ(x)
(1)
式(1)中,W为初始专利-DMC矩阵,φ(x)为潜在变量的固定基函数,y(x;W)为一个变换函数,将x进行空间映射,由此可通过逆映射确认技术真空对应的DMC向量。
最后,为了有效解读技术真空对应的DMC向量,还需将逆映射后的参数转化为二进制,并设定合理阈值以形成二进制表征的DMC向量矩阵,进而得到每个技术真空所对应的DMC组合,也即目标合作技术。
2.3 候选合作伙伴清单获取
首先,评估目标合作技术的可实现性以研判识别出的目标合作技术的可行性。从持续创新视角考察,如果技术真空与其相邻的专利技术关联度越高其可实现性则越高[17]。由此可采用余弦相似度指标对专利真空进行评估,借助GTM专利地图通过逆映射得到专利真空和其周围专利的向量。然后计算专利真空和周围专利非真空夹角余弦值的平均值(取值范围为[0,1]),取值越大说明该技术真空在现实中的可实现性越高[17]。基于欧几里得距离的余弦相似度计算公式,平均余弦相似度具体计算公式如下:
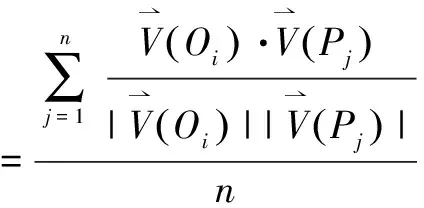
(2)
式(2)中,Oi、Pj分别表示专利真空和该专利真空周围非真空对应的向量,n表示专利真空周围非真空的数量。
其次,分析具象技术领域目标技术与目标企业的技术相关性。通过分析目标企业的专利数据并提取其中的DMC信息,继而与前述技术真空对应的DMC比对,即可确定具象技术领域目标合作技术与目标企业的技术相关性。目标企业与技术真空之间的共同技术领域数量占二者技术领域总数的比值(也即技术距离)越大,说明其与目标企业的技术相似性越高[11]。本文通过DMC信息计算技术距离,其具体计算公式如下:

(3)
式(3)中,QCDMC表示目标企业与技术真空之间的共同DMC技术领域数;E1DMC表示目标企业的DMC数;O1DMC表示技术真空的DMC数。
最后,通过分析目标合作技术的技术匹配度以获取候选合作伙伴清单。在前述研究基础上,可选取平均余弦相似度和技术距离均较高的技术真空对应的DMC组合作为目标合作研发技术,进而通过在数据库的二次检索,获取候选研发合作伙伴清单。
2.4 研发合作伙伴评估
影响合作伙伴选择的因素众多,为了筛选出更匹配的合作伙伴,本文借鉴 Chung等[8]的评价方法,选取了借助技术能力和技术集中度两项指标进行了候选研发合作伙伴评估。此外,在考虑候选研发合作伙伴的专业技术实力的同时,还需考虑其在该技术领域所拥有的专利数量作为补充衡量指标。具体技术能力和技术集中度的计算公式如下:

(4)
式(4)中,Cpi表示潜在合作伙伴p在i技术领域拥有专利的被引次数,ypi表示该专利的发表时间,ye表示基准年。
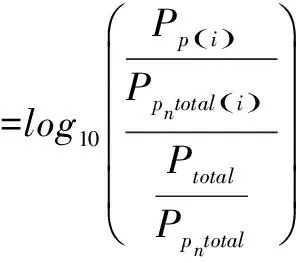
(5)
式(5)中,Pp(i)表示候选合作伙伴p在i领域的专利数量,Ppntotal(i)表示所有候选合作伙伴在i领域拥有的专利总数,Ptotal表示候选合作伙伴p拥有专利的总数,Ppntotal表示所有候选合作伙伴拥有专利的总数。
3 案例应用——智能水下机器人路径优化研发合作伙伴的识别与选择
智能水下机器人(Autonomous Underwater Vehicles,AUV)作为一种水下作业装备,在海洋资源的开发利用中起着至关重要的作用。其中的路径优化技术作为掣肘AUV自主性能的关键技术,对提升AUV的安全可靠性、高效自主完成远程航海与地形勘察作业尤为重要[28]。但现有AUV路径优化技术的研发成本居高不下,亟待确定合适的研发合作伙伴。
3.1 AUV路径优化技术数据的收集与处理
本文的专利信息来源于Derwent数据库。在获取数据前,首先,在确定AUV路径优化检索内容基础上获取相关数据,包括对AUV领域专家访谈以确定检索表达式。具体检索内容见表2。

表2 AUV路径优化技术专利检索表达式
表2中,本文采用“TS= ("underwater vehicle*" OR AUV OR MAUV OR "underwater robot *") AND TS= (path OR track OR obstacle avoid* OR plan* OR position*)”检索策略,共收集到2519条与AUV路径优化技术相关的专利信息。
其次,进行数据的预处理并构建专利-DMC矩阵。从AUV路径优化的2519篇专利信息中提取DMC代码并按照出现频率排序,可得到1968个独立的DMC代码。经领域专家审核清洗后,最终得到对应于1825个专利文献的227个DMC代码,以行和列分别对应不同专利及其DMC向量,进而可构建AUV路径优化的专利-DMC矩阵(见表3)。
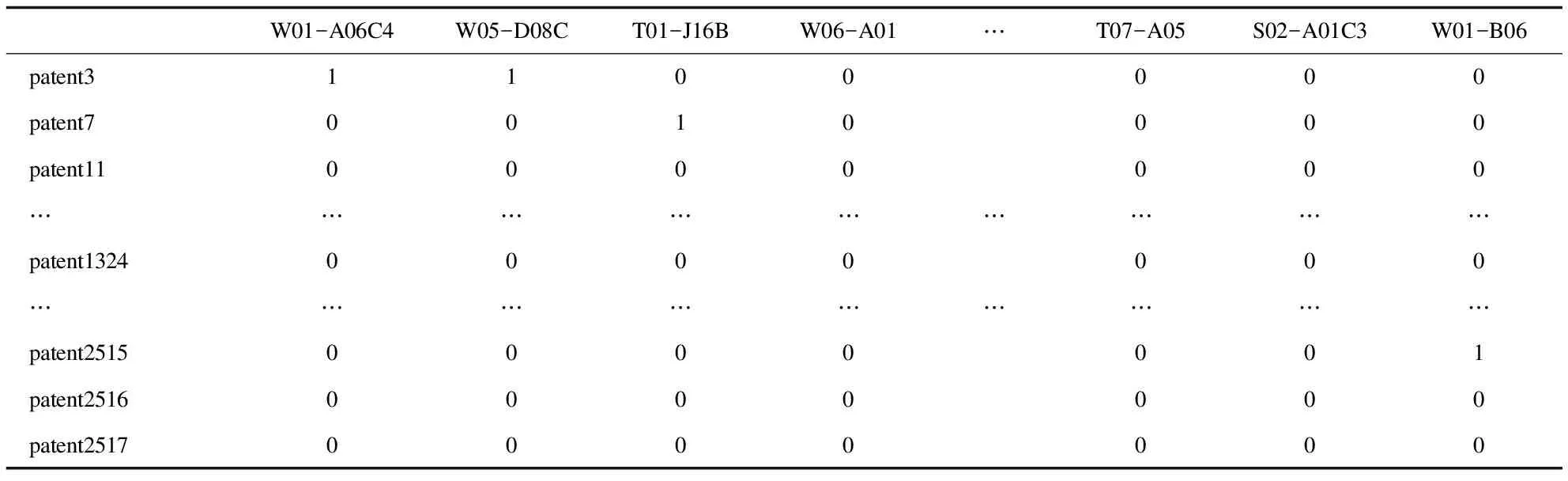
表3 AUV路径优化专利-DMC矩阵
3.2 AUV路径优化技术潜在技术机会的识别
首先,在前述专利-DMC矩阵基础上绘制GTM专利地图以识别技术真空。本文设置的GTM相关参数为:基函数数量为100、基函数宽度为0.8、潜在空间网格上的样本点为8×8、权值正则化因子为0.01,重复迭代次数100次,由此可得到AUV路径优化技术领域的GTM专利地图,继而得到按照单元格顺序标号的15个技术真空(见图3)。

图3 基于GTM的AUV路径优化专利地图
其次,利用逆映射探究具有研发潜力的AUV路径优化领域技术真空。为了将逆映射得到的矩阵转化为二进制矩阵,本文借鉴已有研究成果将阈值设为0.6[27],即当逆映射数值大于或等于0.6时数值为1、否则为0,由此可得到10个具有研发潜力的AUV路径优化技术真空,其专利真空-DMC矩阵见表4。

表4 AUV路径优化各专利真空对应的DMC向量(部分)
最后,研判基于GTM专利地图衍生的、对应每个AUV路径优化技术真空的潜在目标合作技术(见表5)。

表5 AUV路径优化各技术真空对应的DMC结果
3.3 AUV路径优化技术候选合作伙伴清单的获取
首先,从检索到的AUV路径优化专利中确定目标企业。其中,机构X(哈尔滨工程大学)从2007年起即开始申请占AUV路径优化领域最多的专利(约占专利总量的5.5%),其技术分布如表6所示。

表6 机构X的技术分布
其次,分别计算机构X和前述技术真空的技术距离以及真空与周围专利的平均余弦相似度,进而进行技术匹配度分析, 结果如图4所示。对比发现,AUV路径优化的技术真空39、真空30与目标机构的技术匹配度较高。为了进一步说明问题,本文选择技术真空39作为目标合作技术进行诠释。

图4 AUV路径优化技术匹配度分析
由表5,技术真空39对应的DMC为T06-B01B、S02-B01A、T04-D04、S02-B02A、T04-D07D5、T01-N01D、S02-B08E,分别表示目标寻找控制、位置测量、识别、测量高度、检测位置与方向、数据传输、显示与指示等方面的技术信息。
最后,为了实现技术真空39,需要挖掘在DMC代码T01-N01D、S02-B08E深耕的专利申请人作为候选合作伙伴。经在数据库二次检索可获得199个包含目标DMC代码的专利,在滤除其中的噪声后遴选到177个专利所对应的130家候选研发合作伙伴。
3.4 AUV路径优化技术候选研发合作伙伴的评估
经由候选研发合作伙伴的技术能力和技术集中度指标,辅之以拥有的专利数量可为机构X评估并推荐高价值的研发合作伙伴。
本文以2021年为基准年,分别将各个候选合作伙伴的数据代入公式(3)和公式(4),可计算所有候选合作伙伴的技术能力和技术集中度值,结合统计其拥有的相关专利数量,进而可得到49家技术能力和技术集中度均为正值的候选合作伙伴,计算结果见表7。

表7 AUV路径优化候选研发合作伙伴的技术能力、技术集中度和拥有的专利数量
为了更加直观地评估候选合作伙伴,还需以技术集中度为横轴、以技术能力为纵轴构建竞争力组合图,其拥有的相关专利数量则以气泡大小表示,构建候选合作伙伴竞争力组合分析图(见图5)。

图5 AUV路径优化候选研发合作伙伴竞争力组合图
由图5可以看出,在49家候选合作伙伴中:有8家技术集中度和技术能力均较高的,可作为竞争组;有14家技术能力较高但技术集中度一般的,可作为一般组;有16家技术集中度较高但技术能力较低的,可作为潜力组;而11家技术集中度和技术能力均较低的,则不作为考虑对象。
显然,选择研发合作伙伴时通常应优先关注竞争组。在本文的案例应用中,A63企业(TELMAP LTD)是一家导航技术和定位解决方案的上市公司,关注测绘测量、激光雷达、地理信息系统、无人机等技术领域,具有较高的技术能力(1.79)和技术集中度(2.51);其关于AUV的路径优化专利WO2006011149-A2,可将道路数据从地图服务器下载至客户端设备,然后使用下载的数据在客户端设备上呈现部分走廊地图图像,通过传感器即可捕捉到运动数据并进行图像的可视化表达。因此该候选合作伙伴开发的专利与机构X的技术需求匹配度较高,由此可推荐TELMAP作为与机构X进一步开展合作的研发伙伴。
但在现实中,有可能出现未能在竞争组找寻到合适的伙伴,此时则需顺延至一般组或潜力组进行筛选,以寻找较为合适的研发合伙伙伴。如在本文的案例应用中,一般组的A3(BAYERISCHE MOTOREN WERKE AG)尽管技术集中度为0.04,但却具有4.12非常高的技术能力;其关于AUV的路径优化专利WO2017198429-A1、 DE102016208369-A1和US2019100141-A1,可捕获代表车辆的环境数据以确定车辆的位置参数,即通过获取环境数据分析车辆的背景信息,与目标企业的技术需求密切相关。此外,A3在不同的技术领域还拥有多项专利,机构X与其开展合作也可实现不断拓展业务的目的。
又如在本文的案例应用中,潜力组的A11(CLARIO)尽管技术能力为0.33,但却具有4.42非常高技术集中度;其主要涉及汽车电池产品 、零件更换售后等多渠道运营,拥有电池研发、导航系统、图像输出技术和车辆控制等诸多专利,因此机构X也可考虑与候选合作伙伴A11开展长期合作。
4 结论与展望
本文提出了一种基于生成式拓扑映射的研发合作伙伴识别与选择方法。首先,通过文本挖掘,从专利数据库中提取专利信息并进行数据清洗,构建专利-DMC矩阵;其次,利用GTM方法构建专利地图识别技术真空,以寻找目标合作技术;然后,根据技术匹配度确定候选合作伙伴清单;再次,构建竞争力组合图对候选合伙伙伴进行评估和筛选;最后,以AUV路径优化技术为例,验证了该方法的可行性。
本文的学术贡献主要体现在以下几个方面:
第一,在研发合作伙伴的识别评估研究中,引入了技术机会视角,以GTM专利地图识别技术真空为导航,为目标企业靶向定位研发合作伙伴,利用GTM自动识别了具象领域的技术真空,在寻找研发合作伙伴过程中,较之以往过分依赖领域专家进行主观研判的局限,能够细粒度指导企业开展技术创新。
第二,丰富了利用GTM生成专利地图的方法体系。本文通过绘制GTM专利地图识别的技术真空,较之以往大多利用GTM逆映射识别的以关键词或IPC形式呈现的技术机会,蕴含着更加丰富的技术细节语义信息,能够提升了对专利真空识别与解释的客观性。
然而本文仍存在一定的局限性,需要在未来的研究中加以解决:
首先, 有待于利用多源数据开展技术机会识别。尽管专利数据是技术机会发现的主要来源,但仍需结合论文数据和商业数据等提供的更加丰富的技术领域信息综合开展技术机会识别,否则可能会影响识别结果的精准度。因此,后续研究还应综合考虑论文、商业等多源数据,进一步从多角度挖掘和分析技术机会。
其次, 有待于利用多指标开展候选研发合作伙伴的综合实力衡量。尽管本文从技术能力和技术集中度辅之以拥有专利数量为研发合作伙伴的选择提供了一个系统性框架,但仍需针对专利申请人进行综合实力考量,否则可能会影响协同研发的效率。因此,后续研究还应考虑专利申请人的综合实力,进一步从多指标研判合适的研发合作伙伴。
