科考型自主无人潜航器在极地的应用以及未来发展趋势
2024-03-01贾洞洞
陈 驰 吴 刚 贾洞洞 秦 琦 李 源
(中国船舶及海洋工程设计研究院 上海 200011)
0 引 言
自主水下航行器(autonomous underwater vehicle,AUV )又称自主无人潜航器,是1 种具有自航能力的无人操控型水下机器人[1]。其具有安全、轻便、能耗少、航程长、性价比高、可预编程设计路径等特点,可用于大范围的水下环境探测、水下资源勘探、水下探物搜寻等工作。此外,同带缆型遥控潜水器(remote-operated vehicle, ROV)相比,AUV 具有相对更大的活动范围,且无脐带缆缠绕风险;无需庞大的水面系统支持便可进入复杂区域,维修和备车时占用甲板面积小,运行维护费用也相对较低。因此,AUV 已被广泛应用于包括极区在内的海洋科考任务中。
相较于敞水海洋,极地海洋被冰层覆盖,所以无法使用空天设备进行遥感观测。水面船舶若进行走航声学扫测,则需破冰航行,而破冰过程中所产生的噪声以及碎冰对声学探测设备的刮擦,都会导致探测结果的信噪比较低,从而增加数据分析的难度。AUV 则能在冰下潜航,其既可以抵近洋底获取精准数据,也可以贴在冰下航行并绘制浮冰底部图像。当搭载不同传感器时,AUV 可进行极区的生物、化学、地质、水文等方面的探测,有效地帮助极地科研人员开展工作,因此近年来正逐渐成为极地海洋科考界的“宠儿”和标配。
本文旨在为读者详细介绍AUV 在极地科考中的作用、挑战和未来发展方向,并且以此为背景讨论新一代极地科考母船如何适应科考装备无人化的趋势。
1 AUV系统的构成与特征
AUV 系统主要由水面控制台和水下载体这2个部分组成。水面控制台主要用于下水前的调试、使命下载,以及工作过程中的监控、数据上传与处理。水面控制台的形态多样,通常依据使用者的要求进行设计,以便携式箱体或小型控制柜(集装箱)为主[2]。水下载体主要由载体结构、控制/导航系统、通信系统、能源系统、推进系统和任务载荷这6 部分组成[2]。若无特别说明,文中AUV 仅指代水下载体部分,载体部分的构成和对应功能如下文所述。
1.1 载体结构
大多数的AUV 是回转体构型,通常呈鱼雷外形以确保其在水下良好的水动力性能。
在浅海航行的AUV 因为没有太高的抗压要求,因此其控制系统、电池、传感器等基本都封装于耐压舱中,整个AUV 本身即是1 个空间连通且单一的耐压舱,舱壁较薄且舱体材料一般采用航空铝合金[3]。
在深海航行的AUV 由于抗压要求较高,故采用框架结构。设备中相对核心且脆弱的部件(如控制系统)会被封装于钛合金制成的抗压舱内;抗压舱本身及其他可直接接触海水的抗压部件则布置于框架内。框架外采用抗压浮力材料或蒙皮包裹成流线形,以达到理想的水动力效果。具体构型见图1。
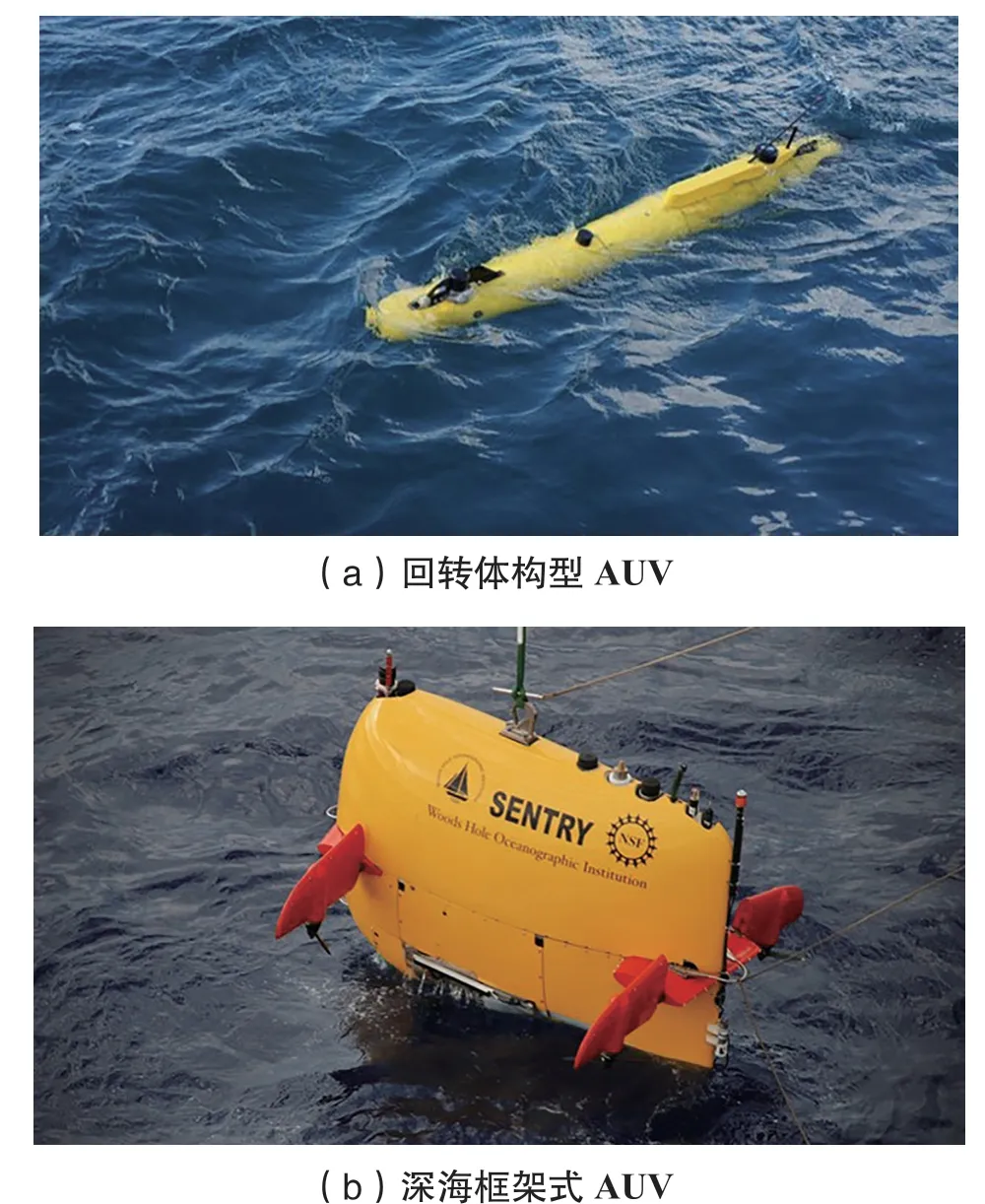
图1 AUV 构型
1.2 导航系统
AUV 的导航分为自主导航和组合导航,都可以不依赖于母船。自主导航主要依靠其自身携带的惯性导航系统(inertial navigation system, INS)和多普勒测速仪(Doppler velocity log, DVL)的数据结合进行导航,这种导航方法会因INS 与DVL 自身测量误差的累积而变得不准确,因此若AUV 进行大范围巡航,则需要对位置进行修正。组合导航会在惯性导航系统的基础上,增加对水下定位或基于卫星的全球定位系统的支持,这2 种系统可以传送给AUV 全球坐标系下的精确位置,帮助其消除自主导航所带来的累积误差。
1.3 控制系统
控制系统是AUV 的大脑,涉及AUV 的运动控制、路径规划、避碰、数据管理、故障诊断等功能。AUV 的控制则由顶层控制和低层控制两部分组成。顶层控制主要指AUV 根据预设任务和环境进行决策和规划,低层控制是指对AUV 各执行机构的控制以及传感器信号的初级处理[2]。当然,无论是AUV 的导航还是控制都离不开来自传感器所提供的信息。
1.4 通信系统
通信系统一般位于AUV 顶部,以便发射与接收信号。AUV 的天线露出水面后可进行无线电通信,但由于水体对无线电有屏蔽作用,所以AUV在水下时一般采用声学信号进行通信。除了专门的声学通信装置外,也可利用声学定位装置进行通信,例如超短基线定位系统(ultra short baseline,USBL),但信号所携带的信息量较少。另外,随着水下蓝绿激光通信技术的发展,AUV 在某些水质清澈但光线暗淡的水域,可以进行200 m 以内的蓝绿激光通信,这种通信方法信息量大、信噪比高,但距离受限。
相对于无线电通信和蓝绿激光通信,水下最常用的水声通信方法数据速率低、信噪比低,仅能传输数据、语音、文字或静态图像数据。
1.5 能源系统
由于水下没有足够的氧气助燃,因此水下装备不能使用燃料作为能源,只能使用水面支持船输送的电力,或者靠自身携带的电池提供能量。AUV作为一种无缆水下装备,必须依靠自身携带的电池供电,但由于各个设备用电电压、电流、功率等参数不尽相同,再加之为了提升电池使用的安全性,因此需要配备电池管理系统[4]。
早期AUV 采用银锌电池或铅酸电池,近年来随着电池技术的发展,能量密度更大的锂离子电池在AUV 上得到广泛应用。适配于AUV 的电池应具有体积小、质量轻、能量密度高且安全性好的特点[2]。
1.6 推进系统
AUV 推进装置通常位于尾部,多采用无刷直流电机带动螺旋桨进行推进。为确保AUV 的航向稳定性,会在其首部或尾部加装稳定鳍(stabilized fin)。
与一般船舶的操纵方式相同,AUV 可通过调整方向舵角度来实现转向。不过,有些AUV 为了提高其水下灵活性与推力,会在尾部加装多台推进器,利用差速来实现转向。此外,也有一些AUV会在尾部加装直接与推进器相连的舵机,通过舵机的转动来调整推进器的方向,从而达到转向目的。
1.7 任务载荷
载体结构、导航系统、控制系统、通信系统、能源系统与推进系统构成了AUV 完整的载体平台。AUV 的使用人员则根据其工作目标的不同,搭配不同类型的传感器组成其任务载荷。例如:若AUV 需要进行水下地形的扫测,则会装备侧扫声呐或多波束声呐;若需要进行水下矿产资源探测,则会安装磁力计;若需进行水下防蛙人任务,则可能会安装多波束成像声呐并搭配高清摄像头。因此,任务载荷由AUV 所要执行的工作目标所决定[5-6]。
目前虽然有人员研究可携带机械手的作业型AUV,但这并不是一个有意义的方向。AUV 的优势在于其广域航行性能,而能悬停进行水下作业则是ROV 和载人潜水器(human occupied vehicle, HOV)的强项,因此机械手不太适合安装于AUV[2]。
另外,AUV 的一种变体——水下滑翔机也在近20 年受到了海洋科考界的广泛重视。水下滑翔机仅依靠其自身重心的调节,便可实现水下滑翔式前进。由于水下航行时无需依靠螺旋桨的主动推进,因此其耗能更少、自持力更长,适用于无时效要求的大面积水下探测工作。
2 AUV 在极地科考中的应用概况及其优势
2.1 AUV在极地科考中的应用
1972 年,华盛顿大学使用AUV 在阿拉斯加北部进行水下冰情冰貌测量,这是公开资料所记载的全球范围内首次AUV 极地科考作业。在此之后,AUV 被频繁应用于极地科考项目。表1 对已公开发表、报道的大部分AUV 科考任务进行了总结。
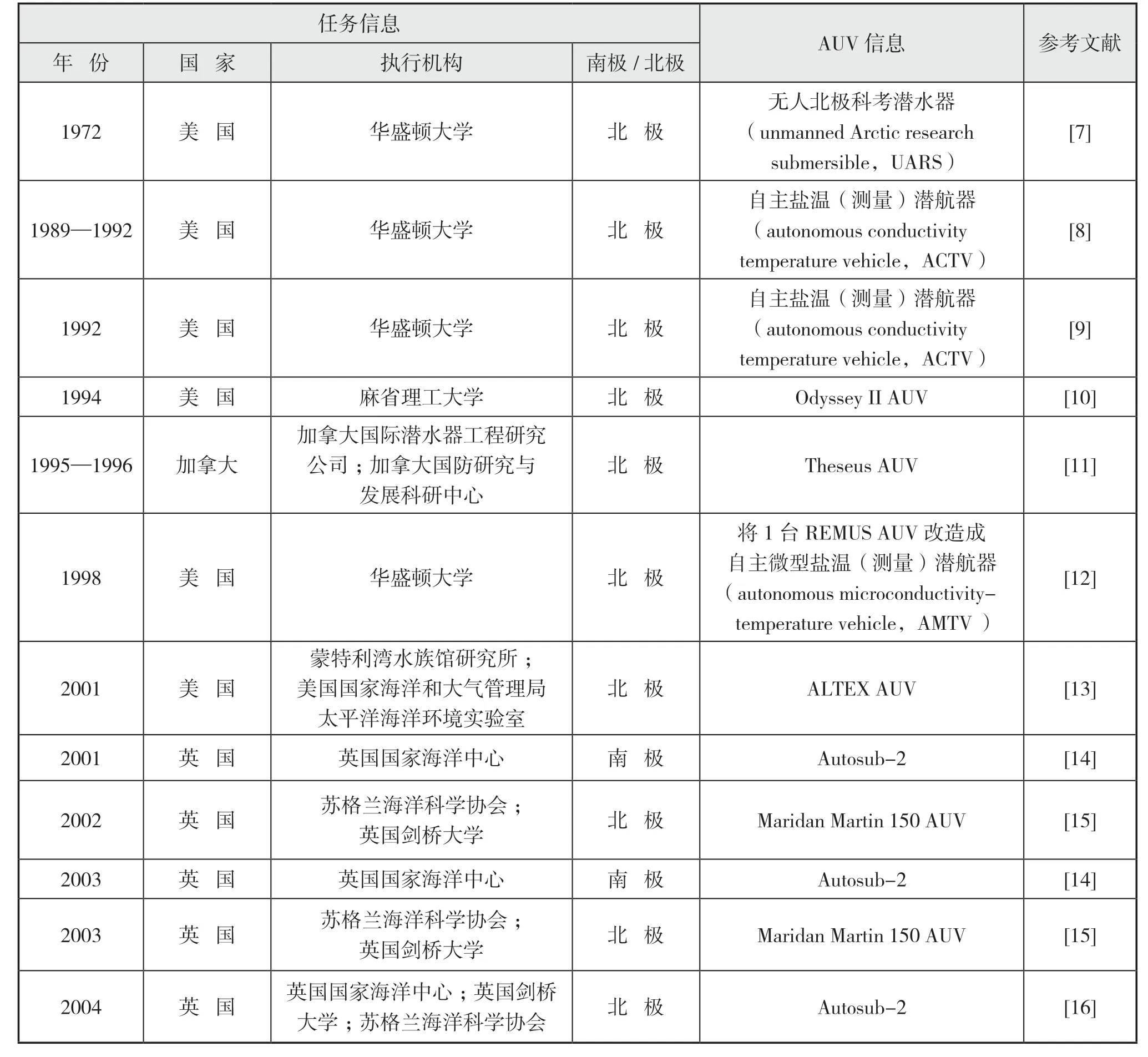
表1 全球范围内部分极区AUV 任务统计
从表1 中可以看出,AUV 被广泛应用于冰形冰貌测量(水下)、水文探测、地质探测、生化取样、气候变化监测等领域,尤其对冰山、浮冰水下部分的测绘工作最为普遍,也最具有代表性。在此之前,科考专家尚无有效手段进行相关观测。
随着近年来电子信息技术、人工智能技术、通信导航技术的快速发展,AUV 的技术成熟度也越来越高,加之广大极地科研工作者意识到AUV 为水下观测带来了方式上的革新,因此近20 年来,AUV 在极地科考领域的使用频率明显高于之前。
在极地科考任务中使用的AUV 与在敞水环境下使用的AUV 在外观形态、科学共载荷上并无区别,但一些执行特殊任务的AUV 会进行载荷的重新布置或改形。如图2 和下页图3 所示,若AUV需在水下执行对冰山、浮冰的测绘工作,则其成像声呐或侧扫声呐会置于AUV 的顶部而不是底部,方便声呐向上发射信号;若AUV 需执行水下冰洞的探测工作,则AUV 的外形会被设计成球形,成像声呐会依据球体外壳呈发散式布置。但总体而言,若无特殊需求,呈谱系且标准化程度高的商用AUV 也可被用于极地科考。
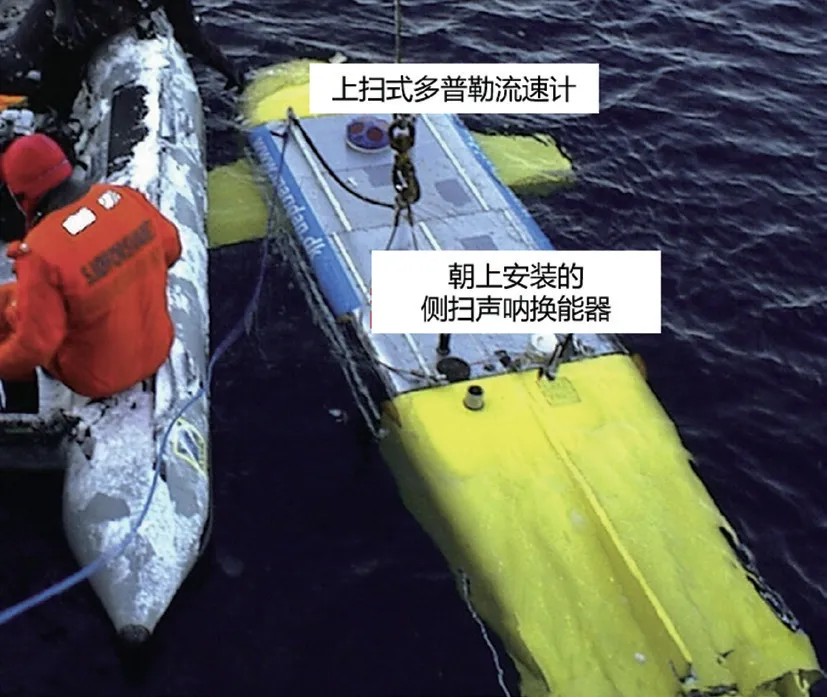
图2 声学设备置于AUV顶部且方向朝上

图3 声呐依据球体AUV 外壳发散布置
2.2 我国AUV在极地科考中的应用
随着我国对于极地科考的重视程度日益增强,极地科考装备技术水平逐步提升,科考模式也由单一的水面、冰面/雪面的平面模式延伸到了空间与水下,形成了立体式的科考架构。目前,我国正在大力发展适用于极地的AUV 产品,并积极探索AUV 在极地的运营,以加强极地水下科考能力。
根据公开报道,来自我国2 个团队共3 种型号的AUV,在南极和北极各参与了2 次作业,任务种类涵盖海冰测量、水文探测、地质探测等。
相较于美国,我国在极区使用AUV 的频次较少,积累的数据与经验也不多,仍处于起步阶段。但在国际上,利用AUV 等无人装备进行极地水下科考已呈现出势不可挡之势。随着我国海洋科技的蓬勃发展以及对极地科考重视程度的日益提升,未来将会有更多的AUV 投入到极地科考任务中。
2.3 AUV在极地科考中的优势
由于极区水域常年被海冰覆盖,因此在开敞水域使用空基或天基平台进行海洋遥感测绘的方式在极地并不适用。虽然破冰船舶可以进入极地冰区,但破冰过程中所产生的噪声会对船载声学设备的测量效果产生负面影响。因此,能够在冰下水域自主航行的AUV 便逐渐成为极地海洋科考之利器。其主要有以下优势:
(1)大范围、高分辨
由于AUV 能耗小、自持力大,故可进行大面积的探测任务;而目前AUV 朝着大深度发展的趋势也扩大了其垂向活动的范围。极区的海洋数据极度匮乏,亟需开展大范围的极区环境调查工作,而AUV 可以很好地解决该问题。
AUV 在工作时全浸没在水中,因此可实时精准感知与记录重要海洋指标。对于水下冰形冰貌、地形地貌、地质特点、剖面流速等需要用声学仪器进行探测的数据,AUV 可以抵近目标测量,从而提高了图像、数据等观测结果的精度和准确度,有利于科研人员的后期工作。
(2)多用途、多功能
极区水下科考有着显著的多学科和跨学科特点,因此需要搭载不同的科考设备以满足各种科研需求。AUV 是一种极为开放的水下科研平台,只要在控制与电力上留足接口、空间上合理规划,就可以搭载集成声学、光学、电学、磁学的传感器。此外,随着以极地、深海为代表的海洋科研方向在全球范围内受到广泛的关注,许多传感器生产商也推出了适配于AUV 的标准化产品。
(3)安全性、可靠性
相对于敞水水域的水下科考作业,极区冰下环境面临更多的不确定性与未知性,因此在极区冰下使用载人型科考装备风险极高,这也是目前全世界范围内仅俄罗斯有过一次极区冰下载人深潜尝试的原因。若使用AUV 等无人装备,则损失的仅是财产与数据,而不用担心人员生命安全问题。
根据目前的公开资料,在极区冰下很少会出现AUV 丢失的情况。大多数AUV 完成既定任务后都能顺利返航[22],由此也说明AUV 的巡线技术与返航技术成熟度较高、可靠性好。
(4)全球洋区适应
虽然极地水面环境具有低温、天气多变等特点,但极地冰下水域的温度和流速与全球其他洋区的差别并不显著,而且随着深度的增加,温度和流速的参数会更加趋同。因此AUV 具有适应全球洋区的特点,即在温带、热带海洋环境中可以工作的AUV 在极区水下同样可正常工作。
3 科考型AUV 极地作业面临的挑战
3.1 布放回收
由于极地水域被冰覆盖,操作人员需要先凿冰洞再布放AUV。若AUV 在水下工作时间过长,则极有可能遇到冰洞被再次冻结封住的状况。不仅如此,极地天气的变化十分迅速,恶劣天气也会对AUV 的回收工作产生极大的负面影响[23]。另外,极夜时自然光线的不足也会对AUV 的回收造成困难。
一般来说,包括AUV 在内的水下航行器会具备微正浮力,即航行器在水下的浮力略大于其重力。这是一种故障安全原则(fail-safe principle),一旦水下航行器失去动力,航行器便会自动浮出水面,以便搜寻人员寻找,AUV 的设计也遵循此原则[2]。然而由于极地存在冰层,因此即使AUV 失去动力时从水中浮起,也会被困冰下。有些团队曾尝试在AUV 上绑安全绳,以期AUV 失联时可人为将其拽回,但现实操作中却出现因AUV 螺旋桨将安全绳打断以及安全绳被水下冰切断而导致AUV 回收失败的案例[31-32]。
3.2 定位导航
极区的地磁场线几乎和地面垂直,而地磁极与地理极点并不重合,因此磁罗经在极区的定位与指向会产生很多问题;也因为极区接近地理极点,陀螺仪的指向能力也会受到很大影响。由于极地水域表层冰面的阻挡以及无线电信号在水中的快速衰减,极地AUV 器也无法使用全球卫星定位系统进行定位。
由于上述限制,极地的水下导航通常采用声学定位系统。不过,受限于水下定位的距离和精度,若要在水下进行大范围的定位,需要布置大量声学信标,这将导致定位成本大幅增加。
3.3 通 信
极地冰层下AUV 的通信也面临着很大的挑战。由于冰层的阻碍,AUV 很难浮出水面并以无线电进行通信,而目前水下蓝绿激光通信技术也不够成熟,且具有很强的指向性,因此目前水下通信最常用的手段仍是水声通信。
然而,水下声学通信(包括声学导航)会遇到以下2 个问题:
(1)水下不规则冰脊对信号的阻拦
浮冰或层冰的底部形状很多情况下并非平板,而是不规则的,因此声学信号很可能会被这些不规则的水下冰脊所阻拦。
(2)声学信号在极地水域的向上折射
在温带和热带洋区,表层水相对于深层水温度更高、密度也更小。由于声学信号更偏向于向密度大的介质发生偏折,因此温带和热带的声学信号更容易向远离表层的方向折射。极地的水温分布却不同:表层海水更冷且密度相对较大,深层海水则较为温暖且密度较小,因此声学信号在极地的传播更容易向表层折射,从而导致声学信号很容易打到浮冰底部而损失大量能量[33]。
3.4 低 温
在严寒状态下,极地水面和水下的温差很大:水面以上的温度可以达到-50 ℃,但水下的温度却接近0 ℃。巨大的温差会导致水下装备中的一些橡胶密封件产生破损,从而严重影响其密封效果[34]。
低温和潮湿的环境也会导致AUV 的外部设施在露出水面后迅速结冰。例如有团队曾记录了AUV 的GPS 天线因露出水面后迅速结冰,而导致装备无法接收信号的案例[13]。
低温环境对于AUV 所携带的锂离子电池也有负面影响。在-20 ℃的温度下,锂离子电池有明显的亏电现象,而低温环境下的充电也会极大损伤锂离子电池的使用寿命[35]。
3.5 复杂水文环境
现代海洋学认为全球范围内大洋环流的“驱动引擎”在两极,尤其是南极。北极的冰与南极的西风带会让其他大洋输送而来的温暖表层水下沉,从而驱动全球洋流,因此极地海域有很明显的垂向洋流[36]。另外,当两极处于春夏季时,冰雪的融化会使附近的海水盐度显著降低,造成较为复杂的水文环境,导致潜航器在水下的浮力发生显著变化,不利于AUV 这类无人潜航器的下潜深度调节[37]。
4 极地科考AUV 的发展趋势
4.1 长航程
对于AUV 或水下滑翔机等无缆、无人的水下装备而言,长航程是一个非常重要的实际要求[38]。航程越长意味着作业范围越广,由此发挥的效用也越高。极区海洋由于冰雪的覆盖人类对其知之甚少,因此长航程AUV 能极大地帮助人类提升对极区海洋的认知。
目前对于长航程的解决方案除了提高AUV自带电池的能量密度外,一些科研单位也开展了AUV 水下充电与驻留的研究[39-41],为AUV 提供“水下充电桩”和“水下服务区”,延长其在水下的工作时间与工作范围。
4.2 大深度
目前的载人/无人潜航器都有大深度化的趋势,而下潜深度越大意味着潜航器在垂向上的作业范围越广。根据目前已测得的数据,北冰洋的平均深度为1 205 m、最大深度为5 567 m[42],南极海的平均深度3 270 m、最大深度为7 432 m[43]。若对极区洋底进行细致的探测,也需大深度AUV 的支持。
4.3 多功能
极地科学考察涉及众多学科的交叉,因此AUV 也需要一次任务搭载多种类型科考载荷,这对AUV 的接口布置、电力分配、空间排布及声学信号兼容等都提出了较高要求。
4.4 自主化
在极区海洋开展科考作业的AUV 不仅要面对未知的洋底环境,更需要面对复杂的顶部冰情。若AUV 要在水下自主开展作业,则对其避障、航线再规划工作提出了更高的要求。不仅如此,由于冰下环境中的AUV 缺乏定位校准和对岸通信手段,故AUV 既无法向外界传递信息,也无法收到水面控制台的更新指令。这就需要AUV 具备可靠的自我决断能力,才能开展好既定任务。
4.5 集群化、组网化
受到近几年多无人机、多无人船集群作业的启发,学界正在研究多AUV 联合作业的相关算法、通信策略、集群协调、自主决策的可能性[44],这是AUV 相关前沿且具有实用价值的技术趋势之一。
无论是极区还是大洋的水下科考探测,都正在朝着覆盖广、快变跟踪、信息反馈即时的方向发展。这不仅要求AUV 进行集群化的运营,更需要AUV集群与潜标、浮标、水面舰船、无人航行器、卫星等装备形成组网系统运行,去执行更复杂、更持久、覆盖范围更广的任务[45]。
4.6 耐低温、耐冰雪
AUV 所面临的低温和冰雪挑战,作者已经在前文中进行了阐述。因此,若要在极区开展常态化的AUV 运行,则需要重点解决密封件在低温状态下的热疲劳问题;另外,应同时对顶部天线等部位设置加热除冰功能,在操作上则要注意低温环境下对锂电池的保护。
4.7 低成本
目前无论是AUV 或者其他水下航行器,都是比较昂贵的作业装备。因此,如果能够在保证AUV 基本功能的情况下尽可能降低其设计、建造和使用成本,则更有利于AUV 的广泛使用。
5 适配AUV 等无人装备的新一代极地科考母船设计思考
AUV 等无人科考装备需要由科考船将其运抵目标水域开展作业。若在船上进行AUV 的释放和回收工作,那么随船吊可提供起重支持。在AUV进行作业的同时,科考船为AUV 的水面控制台提供操作空间和电力供应,同时也可以在AUV 距船较近时监测其位置。但除此之外,AUV 与科考母船之间的联系并不紧密,科考母船目前的功能仅限于运输、起吊与近距离监测平台。
不过,随着AUV 为代表的无人装备在极地科考中的应用已成为大势所趋,新一代极地科考船在设计理念上也需要进行相应适配。科考船需成为无人装备(包括无人航空器、无人船、无人潜航器等)的自动布放回收平台、定位与通信中继以及无人装备信息融合平台与决策大脑,使科考母船能为无人装备提供更多支持,从而形成更加立体高效的科考系统[46]。
由图4[47]可见, 自主机器人近年来所收集的海洋科考数据量正逐年快速上升,占比也越来越高。

图4 自主机器人近年来所收集的海洋科考数据量
6 结 语
如果要更深入更全面地了解极地,那么必须要潜入冰下海洋、冰下湖、冰川洞穴一探究竟。但由于技术手段的缺乏,人类一直都对这些冰下水体知之甚少。20 世纪70 年代,美国科研人员在阿拉斯加使用AUV 进行科学考察,开启了极地科考的新模式。随着越来越多的极地研究人员认识到AUV具有长续航、高分辨、多功能、安全可靠、全球航区适应性等特点,近20 年来已被广泛应用于极地冰下(水下)科考领域,助力科研产出。AUV 因其出众的表现,已逐渐成为各国极地科考装备中的标配。
然而,由于极地的特殊环境,AUV 在极地的使用会遇到布放回收、定位导航、通信、低温、极地复杂水文环境的挑战。这不仅需要操作人员的娴熟业务水平,也需要提升AUV 的极地适配性。在未来,极地科考型AUV 不仅能够克服环境所带来的挑战,也定会变得更加自主。同时,AUV 将不再孤军奋战,而是会与无人航空器、无人船、科考母船、浮标、潜标或多个AUV 组网一起形成极地水下观测网,从而实现更大范围、更精细、更快速地监测极地海洋,反馈科考数据。而AUV 在极地的无人化、自主化应用,也为人类探索诸如“木卫二”等拥有冰下海洋的外星球奠定了基础[48]。
我国正式使用AUV 进行极地科考的时间较晚,但使用过程中的技术含量并不低,所产出的科研成果也很显著。随着我国更加扎实地推进海洋强国建设,定会有更多、更先进的AUV 投入到极地科考领域,支持我国产出更丰硕的极地科研成果。