某船机旁双机并车控制箱设计及应用
2024-03-01杨亚男赵继权薛小卫
杨亚男 赵继权 薛小卫
(沪东中华造船(集团)有限公司 上海 200129)
0 引 言
船用柴-柴联合主动力装置是由2 台或多台柴油机通过传动装置、轴系共同驱动1 个螺旋桨而构成的联合动力装置[1]。在四机双桨联合动力装置中,通过采用单轴/双轴、单机/双机每轴形成多种组合运行模式,可以满足船舶在不同运行工况下的推进性能需求,实现较高的机动性和生命力。目前国内该类型动力装置配置的监控系统主要为相关标准中的“I 类控制”:即主推进装置的设备与系统需装有控制、监测报警和安全系统,主推进装置由驾驶室及集控室的控制站进行遥控和自动控制,在机旁进行手动控制。当驾驶室控制站遥控时,集控室控制站应配备人员值班监视[2]。
随着计算机及网络技术的高度发展和其在船舶行业的广泛应用,使用方对主推进装置机舱本地操作的自动化程度要求也越来越高,要求本地具备自动并车、集中控制显示等功能,而在进口设备应用过程中,会出现标准化产品功能无法满足使用要求的情况。如MTU 公司与MAN B & W公司的主机遥控系统[3],仅能实现集控室与驾驶室控制站的自动控制功能,机舱本地控制则需通过主推进装置自带的机旁控制箱实现(仅为分散在主机、齿轮箱和调距桨旁的手动控制)。由于进口设备的标准化程度高,接口和功能修改难度较大,故如何能在上述标准系统中实现主推进装置的本地自动并车功能,尚需研究一种修改量少且可操作性强的设计方案。
1 系统修改方案
1.1 主推进装置原有本地监控设施简介
1.1.1 设施组成
某船采用四机双桨联合动力装置,每套主推进装置分别由2 台MTU 柴油机、2 个盖斯林格联轴器、2 套盖斯林格轴装置、2 个VULKAN 联轴器、1 台双机并车齿轮箱、1 套轴系和1 套KAMEWA 可调距螺旋桨系统组成,其布置简图见图1。同轴系的2 台柴油机分别布置在前、后主机舱,同机舱2 台主机分舷布置,齿轮箱布置在齿轮箱舱。

图1 某船主机、齿轮箱布置简图
主机遥控系统采用德国MTU 公司的RCS-5 系统,机舱本地的主推进装置监控设施组成及构架如图2 所示[4],包括主机遥控系统的齿轮箱监控单元、调距桨监控单元、控制器局域网络(controller area network, CAN)总线网络,而主机、齿轮箱均自带机旁控制箱,调距桨液压泵站单元自带应急控制板。
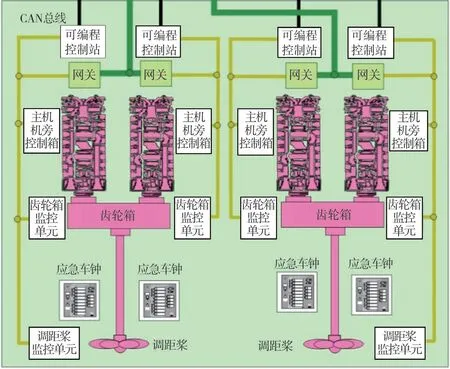
图2 MTU 机舱本地主推进监控设施标准构架图(修改前)
以上本地监控设施通过现场总线通讯,并通过网关接入上层现场总线,实现与各遥控控制站的通讯。
1.1.2 设施功能及不足
机舱本地原有监控设施的主要功能见表1,每个设备的功能都相对独立且操作位置分散。这种设计对于所有主机、齿轮箱、调距桨液压单元都在1 个主机舱的配置来说,尚可满足本地手动操作要求,但对于如图1 所示的隔舱设计(前主机舱-齿轮箱舱-后主机舱),就存在明显不足:一方面,同轴系2 台主机和齿轮箱的机旁控制箱分别在前、后主机舱和齿轮箱舱,手动同步并车操作复杂,且负荷分配实现难度大;另一方面,机舱本地除了备车完车、维护维修等作业外,一般是在应急情况下操作,此时主推进装置的操作和运转效率至关重要。因此,在机舱本地实现遥控系统部分重要自动控制功能(例如自动同步并车、自动负荷限制和重要信息集中显示)非常必要。

表1 机舱本地主推进装置监控设施功能简表(修改前)
1.2 系统修改方案
MTU 主机的机旁控制箱为标准化产品,其接口、功能均无法修改,想要实现机旁自动双机并车功能,只能通过增加新设备的方法来实现。但新增功能型模块和软件所需的设计及被船级社认可的时间较长,根本无法满足该船的设计建造周期,因此只能在原有系统标准结构和功能模块的基础上进行设计。
该船主机遥控系统的原控制层级是驾驶室控制站(遥控)、集控室控制站(遥控)和本地监控设施这3 级层级,其核心控制单元的远程接口模块(remote interface module, RIM)布置在集控室控制站的集控台,主机转速与调距桨螺距指令的给定、双机并车负荷分配、自动负荷限制和控制权限转换等功能均由RIM 实现。因此,如果在系统原有遥控控制站层级中再增加1 级机舱本地“遥控”控制站,并将该控制站的优先级设置为高于集控室和驾驶室控制站,可实现在机舱直接从集控室或驾驶室取得主推进装置的控制权;同时为确保机舱控制站优先级及其功能的可靠性,将控制单元RIM 由集控台移至该控制站,实现在其他控制站失效情况下,机舱控制站的控制和保护功能仍然有效。
上述方案不涉及功能型模块的增加,而MTU 主机遥控系统软件中有“控制站优先级设置”这一选项,可以在如下页表2 所示的表格中,通过填入优先级序号等来便捷地设置控制站优先权。系统的硬件功能模块和软件逻辑没有修改,因此不需要重新进行船级社型式认可,也较容易被设备供应方接受。

表2 MTU 主机遥控系统控制站优先级设置表
2 机旁双机并车控制箱设计
主机遥控控制站常规设计为控制台形式,国内主推进装置的监控设计也因国产主机通常无机旁控制箱,由遥控系统配置主机机旁控制台。考虑到该船主机的布置特点和功能需求,采用控制箱的形式更有利于在机舱有限的空间内灵活安装和便捷操作;并且考虑到应急工况下主推进装置的安全、高效运转,主机自动负荷限制功能和调距桨后备控制功能也需兼顾。因此,最终按表3 开展机旁双机并车控制箱的功能设计。

表3 机舱本地新增主机双机并车控制箱功能设计简表
2.1 功能设计
2.1.1 自动同步并车功能
自动同步并车的功能设计要求为:当操作指令要求由“单机/单轴”变为“双机/双轴”时,遥控系统能自动将未接排的主机转速调节为可匹配已接排主机的转速,然后发出离合器接排命令;接排成功后,由遥控系统实施主机功率平稳转移,并在双机并车运行时保持功率平衡。当指令要求由“双机/双轴”变为“单机/单轴”时,遥控系统能自动将待解列主机的负荷平稳转移至相应的工作主机;负荷全部转移后,系统发出离合器脱开命令并实现自动解列。[5-6]
2.1.2 自动负荷限制功能
自动负荷限制功能设计要求为:在机旁的遥控分控模式下,主机负荷一旦达到主机的转速-燃油扭矩限制线,遥控系统将自动生成减小螺距的指令,使主机油门限制在扭矩限制线下,以防主机因扭矩限制而转速下降。当主机负荷低于扭矩限制线时,遥控系统自动生成指令并将螺距恢复到所需螺距,即遥控系统能按主机的负荷限制曲线,始终保证主机在负荷安全区运行[7]。
2.1.3 分控控制功能
分控控制功能是指遥控系统分控模式下的半自动控制功能。在联控模式下,遥控系统根据复合车钟操纵手柄位置,按照预设的联控曲线发出主机转速和螺距指令,自动控制主推进装置运行;在分控模式下,主机转速给定及螺距给定等都由操作人员控制,通过主机增速/减速、离合器接合/脱开、螺距增加/减少等按钮控制主推进装置运行,并且自动负荷限制功能以及双机并车时的功率平衡控制仍然必须有效。
2.1.4 调距桨后备控制功能
原系统标准设计中,调距桨后备控制功能仅设置在驾驶室控制站和调距桨液压单元机旁。该功能在调距桨闭环控制系统失效的情况下使用,此时螺距控制指令为开关量信号,直接控制调距桨液压单元阀组;螺距控制由随动控制变为非随动控制,操作时必须通过实时观察螺距表来达到所需螺距。
2.2 人机界面设计
完成功能设计后,还需进一步明确控制箱的人机界面形式和内容,才能为设备方进行控制箱施工设计提供充分的设计输入。控制箱的设计以“安装空间小、操作简单直观”为原则,人机界面按应急操作等级要求设计为“硬按钮+仪表”形式,其面板布置、面板详图分别如图3 和图4 所示,包括主机转速控制面板、齿轮箱离合器接排/脱排控制面板、分控模式调距桨控制面板、调距桨后备控制面板、本机主机转速表、同轴主机转速表、本轴转速表和调距桨螺距表等。
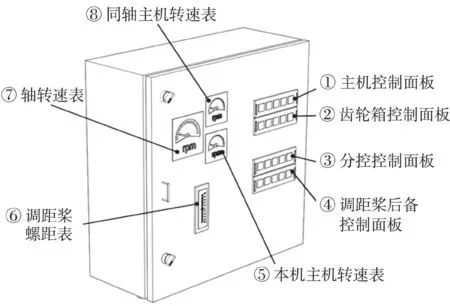
图3 机旁双机并车控制箱布置总图
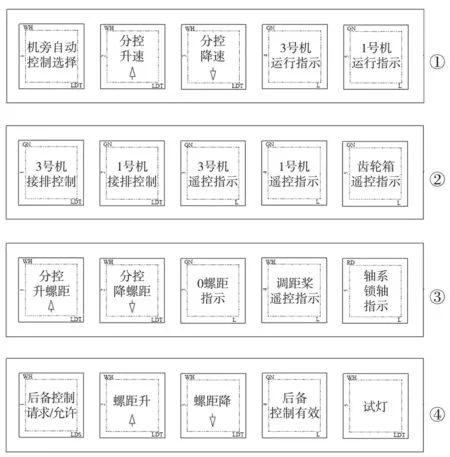
图4 双机并车控制箱控制面板详图
3 实船应用
3.1 实船布置安装
实船应用上述技术方案后,该船机舱本地主推进监控设施组成和构架如图5 所示。
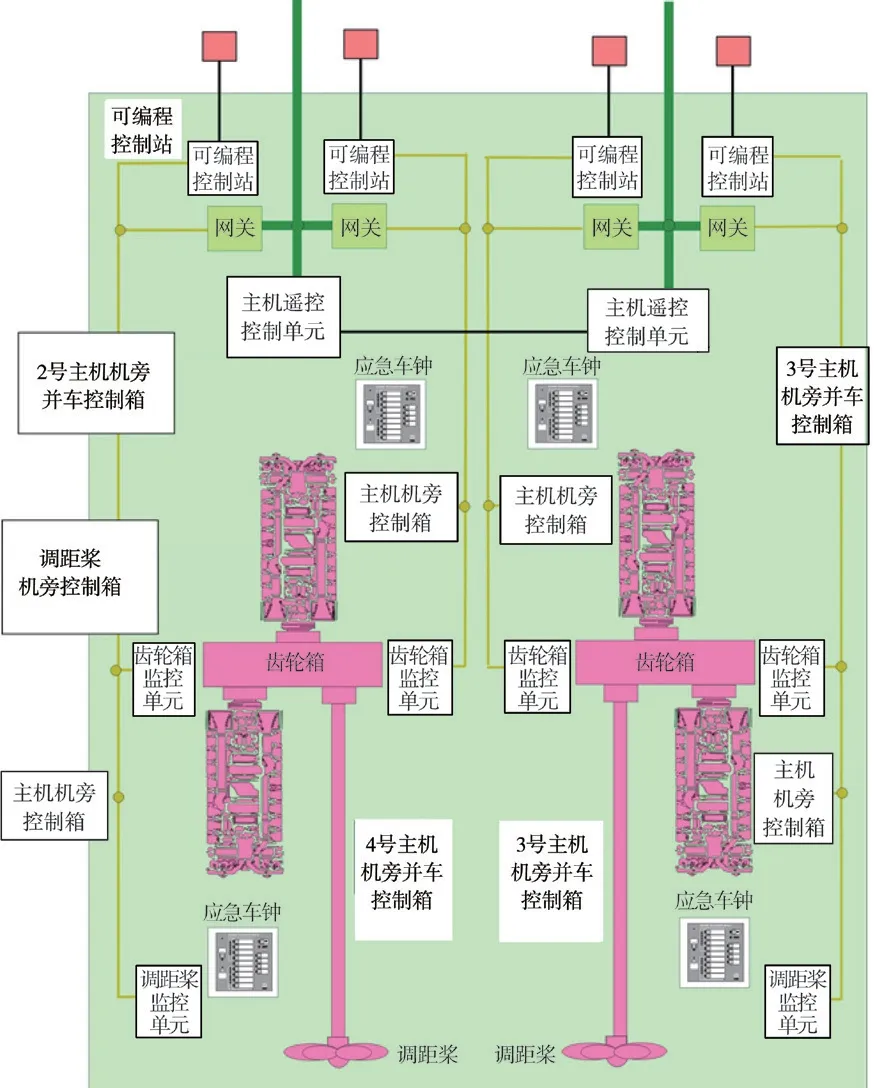
图5 机舱本地主推进监控设施组成构架图(修改后)
根据机舱站位需求,在每台主机的机旁设置1台双机并车控制箱,其中同一轴系2 台控制箱的面板操作功能相同,可以实现在前或后主机舱控制同轴系主机双机并车和调距桨的后备控制功能。遥控系统控制单元RIM 为每轴1 只,由集控台内分别移至1 号双机并车控制箱和3 号双机并车控制箱,控制箱内部同时增加功能接口单元、网络接口单元和电源接口单元等MTU 标准化模块,每个控制箱分别由2 个不间断电源系统(uninterruptible power system, UPS)独立回路供电。
主机机旁各类控制箱较多,为合理紧凑地布局和安装,设计落地式组合支架用于集中安装主机机旁控制箱、主机双机并车控制箱、主机油泵控制箱和应急车钟,同时便于敷设相关电缆。实船主机机旁控制箱布置三维效果图如图6 所示,操作人员可以面向主机实现各机旁控制箱的集中操作。
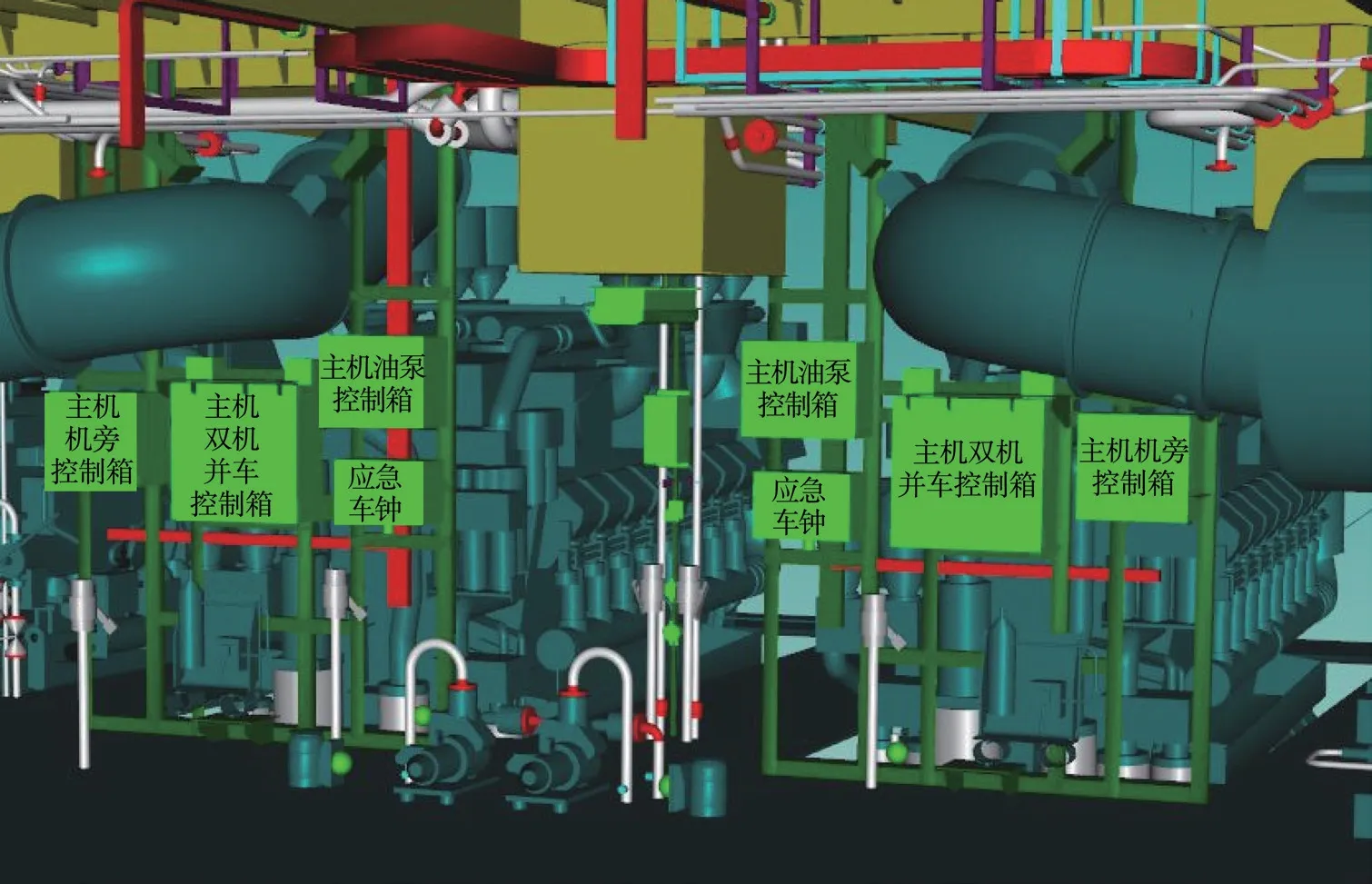
图6 主机双机并车控制箱实船布置三维视图
3.2 实船试验验证
4 台主机双机并车控制箱安装接线完毕后在系泊试验中进行功能试验验证,试验项目及试验现象如下,此处所述相关按扭参见图4。
试验准备:将主机、齿轮箱、调距桨自带机旁控制箱上的“本地/遥控”选择开关置于遥控位置,机旁双机并车控制箱上2号面板和3号面板的主机、齿轮箱、调距桨遥控指示灯均为点亮状态。
(1) 控制权限转换试验
按下1 号面板的“机旁自动控制”按钮,按钮灯点亮,机旁并车控制箱直接取得遥控系统控制权限;再次按下按钮,按钮灯灭,控制箱功能关闭。断开驾驶室控制站、集控室控制站相关电源,并再次按下“机旁自动控制”按钮,按钮灯点亮,在此状态下进行后续试验。
(2)首机接排及分控试验
按下2 号面板的 “1 号机接排控制”按钮,1 号主机转速自动升高至首机接排转速并自动接排,接排成功后该按钮灯点亮。接排后,通过1 号面板的“分控升速”或“分控降速”按钮调节主机转速,再通过3 号面板的“分控升螺距”或“分控降螺距”按钮调节螺距,转速表和螺距表所显示的变化与操作指令一致。
(3) 自动负荷限制功能
主机转速不变,通过4 号面板的“螺距升”按钮增加螺距,直至观察到螺距表显示数值不再增加甚至减小为止,负荷自动限制功能有效。
(4)自动双机并车试验
按下2 号面板的“3 号机接排控制”按钮,3 号主机转速自动升高至1 号主机的匹配转速后自动接排,完成自动同步并车及自动负荷分配,接排成功后该按钮灯点亮;再次按下“3 号机接排控制”,轴上负荷自动转移至1 号主机后,3 号机自动脱排且该按钮灯熄灭,自动解列完成。
(5) 调距桨后备控制试验
模拟调距桨闭环控制系统失效,按下4 号面板的“后备控制请求/允许”按钮,按钮灯点亮,按下并保持“螺距升”或“螺距降”按钮以调节螺距,实时观察螺距表显示的数值,直至螺距调节功能正常。
实船应用效果表明:控制箱安装空间需求小,没有增加机舱设备及系统的布置压力;试验中各项功能均满足方案设计要求,并顺利通过了船东、船检的验收。该技术方案高效地实现了机旁自动双机并车功能以及相关的控制和保护功能,同时确保上层控制站失效时上述功能的可靠性。
4 结 语
本文通过某船机旁双机并车控制箱的设计,介绍了如何在不涉及标准化产品软硬件大量修改的前提下,仅通过增加单一装置和适量调整系统内原有模块的安装位置和设置,实现机旁自动双机并车功能。该设计提高了机舱本地应急工况下对主推进装置的操作效率,适用性较强,可以为有类似需求的主机遥控系统设计提供参考。