电动作业梯子稳固装置智能控制系统设计
2024-02-29吴晓锋王宾罗予均黄华吴梦圆
吴晓锋,王宾,罗予均,黄华,吴梦圆
(广西电网有限责任公司南宁宾阳供电局,广西 南宁 530400)
0 引言
作业梯子是用于提高人员作业高度的专用设备,目前大多采用液压技术或气动技术驱动,存在噪声大、能耗高、维护成本高等问题[1]。近年来,随着工业自动化水平的不断提高,电驱动技术在各个领域得到了广泛的应用,本文设计一种作业梯子稳固装置智能控制系统,解决现有技术的不足。
1 概述
在现有作业踏板结构的基础上,提出一种基于电机驱动技术的稳固装置设计方案,包括电机、传动装置、控制系统等。通过传感器获取作业踏板的倾斜角度和振动信息,运用控制算法动态调整电机的转速和输出力矩,保持作业踏板的稳固与稳定。
2 设计方案
在常规使用的梯子上加装一种适用多种地形、地面和多墙面吸附的装置,满足梯上作业的安全性、适用性和经济性[2]。作业梯子稳固装置示意图如图1 所示。根据现场条件分析装置的适用范围,特别是判断使用地点的风险点以及需要达到的目的[3]。
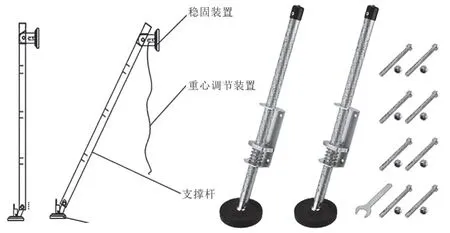
图1 作业梯子稳固装置示意图
3 控制系统
3.1 模型预测控制理论
模型预测控制理论的推理和决策过程与人类大脑的推理过程类似,是一种最简单的人脑模拟器。与传统的控制系统相比,模糊控制对被控对象参数变化有较强的适应能力[4]。采用模型预测控制器时,作业梯子稳固装置控制系统的仿真模型如图2 所示。

图2 模糊控制器下作业梯子稳固装置控制系统仿真模型
模型预测控制是一种基于预测模型的反馈控制方法,利用已有模型、系统当前状态和未来控制量预测系统未来的输出,通过滚动优化的方法求解带约束的优化问题,利用系统实时状态进行反馈校正,增强控制过程中的稳健性,最终达到控制目的。
(1)预测模型。根据当前的测量值预测系统未来动态。预测模型的功能为算法着重考虑的方面,对预测模型的表达形式没有限制。
(2)滚动优化。通过使某项性能评价指标反复在线优化得到最优控制量,保证优化的实时性。滚动优化是模型预测控制最主要的特征,也是其与传统最优控制最大的区别。控制方法的优化目标随着采样时间的推移不断变化,立足于每个采样时刻的状态信息,求解未来有限时域内的开环局部最优控制。在下一采样时刻重复上述优化过程,反复进行,以局部最优解替代全局最优解,从而获得实际最优控制量。
(3)反馈校正。实际控制过程中,模型失配或外部环境干扰等因素可能导致控制偏差,偏离理想控制状态。为此,检测被控对象的实际输出,基于每个采样时刻的输出值与预测输出的实时偏差,采用反馈校正的方法对下一采样时刻的预测输出值进行修正,为滚动优化提供更准确的预测基础,构成闭环控制优化[5]。
3.2 控制系统设计
模型预测控制系统结构如图3 所示,包含控制器和被控平台模块。预测模型输入和输出分别为u(k)和ym(k+i),根据当前状态信息及输入,计算被控系统未来的状态和输出,可以是状态方程、响应函数或传递函数。
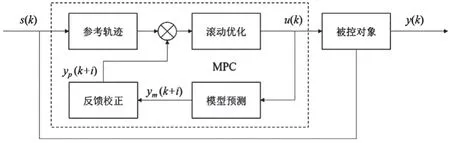
图3 模型预测控制系统结构图
滚动优化是获得最优的被控对象输入,在有限时域内反复在线滚动优化,优化算法选取一定的优化指标及约束条件,计算满足约束条件的最优值为被控量。在线校正是为了消除真实系统与预测模型的失配或环境干扰导致的控制偏差,对产生的偏差进行补偿,同时作为反馈,为下一个采样时刻的滚动优化提供数据,进行新的优化。参考轨迹输入和输出分别为s(k)和y(k),也是预期的控制目标,是平滑缓和的期望曲线。
4 智能化设计
4.1 传感器与数据采集
基于静电感应原理,将非接触式电压传感器的探头放入被测带电体产生的电场中,电场强度信号与传感器的检测信号耦合。由于电场强度与被测电压之间为线性关系,传感器检测信号与电场强度信号成正比关系,传感器检测信号与被测电压为线性比例关系,能够实现带电体的检测。
4.2 电机选择
伺服电机对位置、速度有着较高的控制精度,并且有着较高的额定转速,可达2 000~3 000 r/min,设计采用伺服电机控制设备的水平移动。电机的选择根据转矩与惯量比来确定,通过计算负载转矩的方法,本文预选松下公司生产的伺服电机,惯量比小于10。
5 仿真实验
稳固装置运动学模型参数设置见表1。当输入信号为单位阶跃信号时,模型预测控制系统响应如图4 所示。

表1 稳固装置运动学模型参数设置

图4 模型预测控制系统响应
从图4 中可以看出,采用控制器时,控制系统的单位阶跃响应出现超调,且响应速度相对较慢。对于作业梯子的位置控制,若出现超调现象可能导致碰撞,因此需要对控制器进行优化。以“误差大,误差变化率大,输出量大;误差大,误差变化率小,输出量小”为准则,建立控制规则。改进后的系统响应如图5 所示。
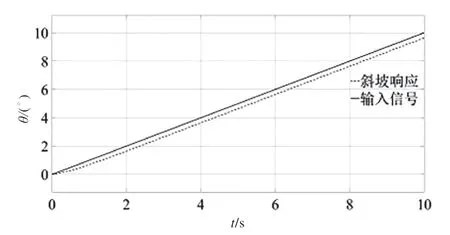
图5 改进后的系统响应
从图5 中可以看出,优化后的控制系统单位阶跃响应无超调,上升时间为0.3 s 左右,且对斜坡信号有较好的跟随性,控制效果良好。
6 结语
本文设计的电动作业梯子稳固装置智能控制系统,通过控制算法和智能控制技术实现了实时监测和调节。仿真实验结果表明,系统具有良好的稳定性和舒适性,具备一定的应用前景和市场潜力。
