分数阶Rucklidge不确定混沌系统的自适应滑模同步
2024-02-29李庆宾毛北行
李庆宾,毛北行
(郑州航空工业管理学院 数学学院,河南 郑州 450015)
混沌同步自20世纪60年代被提出以来,就受到人们更多关注[1-5].随着人们对分数阶系统及滑模方法的深入了解,针对分数阶非线性混沌系统滑模同步方法的研究取得了很大成果[6-10].文献[11]通过构造两种截然不同的分数阶滑模函数,研究分数阶Newton-Leipnik混沌系统的同步问题.文献[12]研究具有模型不确定和有界外扰下,分数阶Duffling不确定系统的滑模终端同步.文献[13]研究具有不确定项和外扰下,Sprott分数阶不确定系统的自适应滑模同步.文献[14]通过构造分数阶滑模面和自适应控制律,研究分数阶不确定混沌金融系统的自适应滑模同步.文献[15]研究纠缠混沌系统的比例积分滑模同步.Rucklidge混沌系统[16]自1992年被提出以来,对该系统的同步与控制研究取得了很多成果.文献[17]基于自适应控制方法,研究Rucklidge系统的同步问题.文献[18]研究关于一类分数阶Rucklidge混沌系统的控制与分析.文献[19]讨论一类Rucklidge混沌系统的同步与应用.论文研究具有模型不确定及外扰下的分数阶Rucklidge系统的自适应滑模同步问题,通过设计一个滑模函数获得分数阶Rucklidge不确定混沌系统自适应滑模同步的两个充分条件.该混沌系统的控制难点和创新之处在于设计的滑模函数相对简洁,即设计半截误差函数形式的滑模函数而不是设计全息误差函数形式的滑模函数,从而更加便于实现.
1 主要结果
定义[20]Caputo分数阶导数定义为
文献[18]中分数阶Rucklidge混沌系统如下
当a=-2,b=6.7,q=0.978时,系统(1)的吸引子如图1所示.

图1 系统(1)的混沌吸引子
将(1)设计为主系统,从系统为
其中:Δf(y)代表不确定项,y=[y1,y2,y3]T,d(t)为外部扰动,u(t)为控制器.
定义ei(t)=yi(t)-xi(t),有
假设设不确定项Δf(y)和外部扰动d(t)有界,即存在未知参数m,n>0,满足|d(t)|<n.
引理1[21]若x(t)为连续可微的函数,则对于任意的t≥t0,均有
定理1如果假设成立,构造滑模面,k>0,控制器为
自适应律为
证明位于滑模面时,由,因为k>0,所以e2→0.进一步得到,混沌系统轨迹有界,故y2+x2为有界变量,而e2→0,故.因此上述方程可写为,所以定义的滑模面是稳定的.
整数阶Rucklidge混沌系统为
以(4)作为主系统,设计从系统为
其中:Δf(y)代表不确定项,y=[y1,y2,y3]T,d(t)为外部扰动,u(t)为控制器.
定义ei(t)=yi(t)-xi(t),有
引理3[23](Barbarle’s) 若函数f(t)在[0,+∞)上一致连续,并且广义积分存在,,其中f(t)表示一致连续的函数.
定理2如果假设成立,构造滑模面s(t)=+ke2,k>0,控制器为
自适应律为
2 数值仿真
系统参数选取a=-2,b=6.7,q=0.978,用Matlab仿真进行数值验证.
定理1中构造滑模函数
控制器
自适应律
定理2中构造滑模函数
控制器
自适应律
定理1,2中的误差曲线如图2,3所示.从图2,3中可看出误差初始时刻相差较大,离坐标原点距离较远,随时间的变化与推移,系统误差逐渐趋向原点.由定理1,2的比较可看出,定理1中构造的是分数阶滑模函数与自适应律,而定理2中设计的是整数阶滑模函数与自适应律,从而说明分数阶的结论可以平推到整数阶.
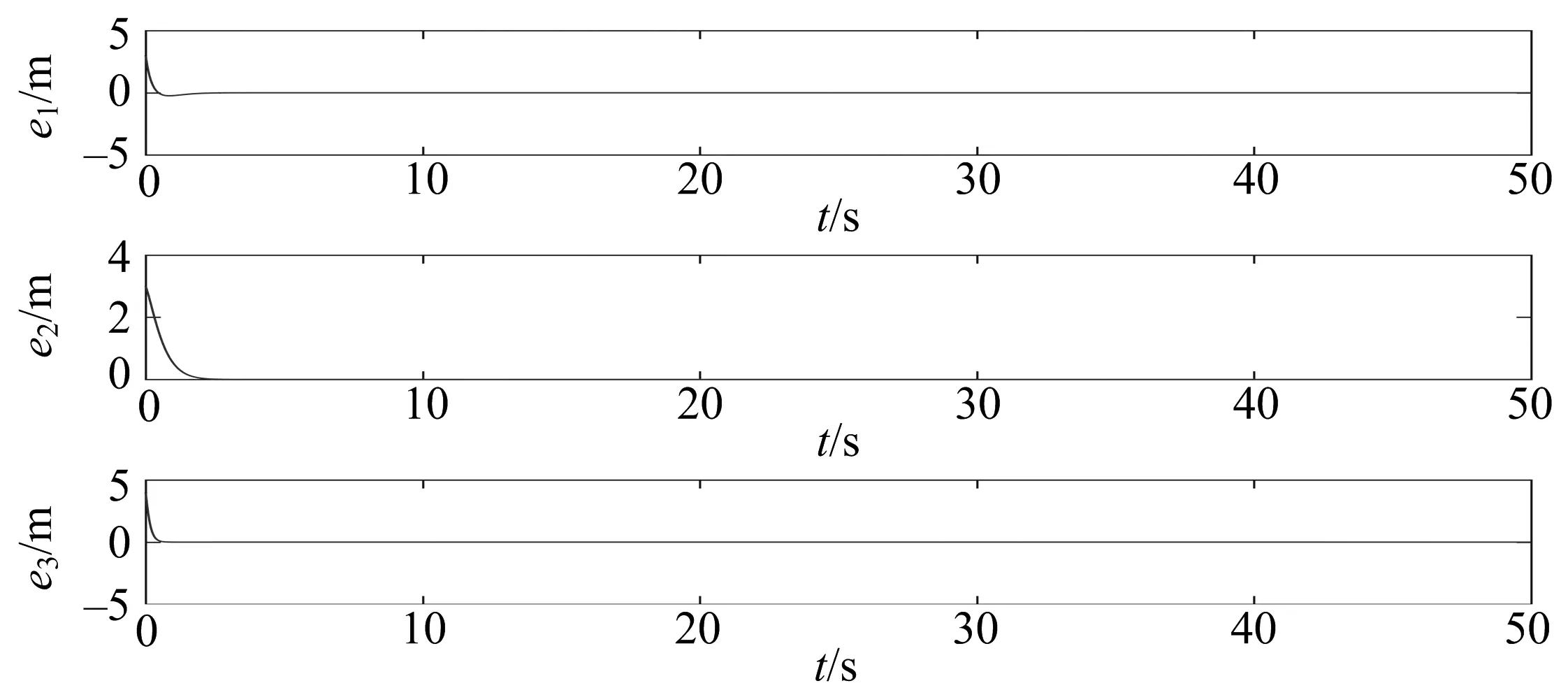
图2 定理1中的系统误差

图3 定理2中的系统误差
3 结束语
研究分数阶Rucklidge不确定混沌系统的自适应滑模同步问题,通过构造滑模函数及自适应律,获得分数阶与整数阶Rucklidge不确定系统自适应滑模同步的两个充分条件,利用Matlab仿真算例验证了该方法的有效性.
