七功能水下液压机械臂设计
2024-02-26赵飞姚震球凌宏杰
赵飞,姚震球,凌宏杰
(1.镇江市高等专科学校 电气与信息学院,江苏 镇江 212028;2.江苏科技大学 海洋装备研究院,江苏 镇江 212003)
有缆遥控水下机器人(remotely operated vehicle,ROV)是探索海洋奥秘、开发海洋资源的重要设备。目前国内水下机械臂的技术还尚未成熟,仍处于实验研究阶段,虽然研究人员在一定程度上解决了水下机械臂的设计、仿真,以及实验问题[1-9],但部分作业型水下机器人搭载的作业机械臂,主要为通用型,针对性不强,尤其是配套水下采油树作业的专用作业型机械臂尚无成熟产品。为此,针对水下采油树作业需求,设计一种7功能水下液压机械臂,并对其进行运动求解、仿真和实验。
1 总体结构和技术指标
所设计的机械臂采用关节型铰接结构,可实现包括偏转和俯仰在内的六自由度位置变化及抓取功能,与其他结构形式机械臂相比具有占地面积小而动作范围大的特点。该机械臂总体结构见图1,技术指标见表1。

表1 机械臂设计指标
图1中的7功能机械臂包括6个活动关节和1个抓取卡爪,具体为6个活动关节的偏转、俯仰和周向运动功能和卡爪的抓取功能。其中,第一关节、第五关节和第六关节为腕关节;第二关节、第三关节和第四关节为肘关节,抓取卡爪根据作业任务不同可选配,这里介绍设计的专用平动开合型抓取卡爪。
上述6个活动关节的设定技术指标见表2。

表2 活动关节技术指标
根据表2绘制机械臂的工作区域,见图2。

图2 机械臂工作区域
2 结构设计
活动关节简化为摆动导杆机构,结合表1中的技术指标,进行结构设计。
抓取卡爪采用四边形机构冗余设计,实现平动开合,卡爪的运动关系和受力分析见图3。
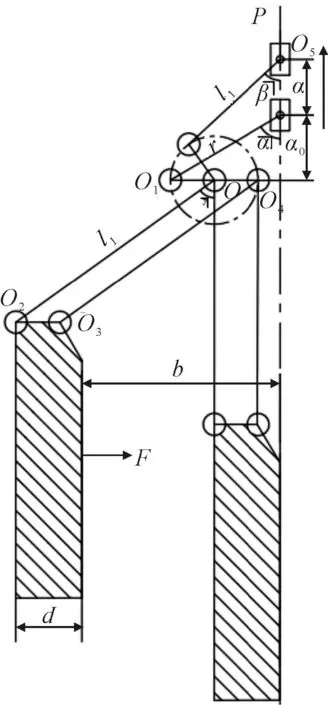
图3 卡爪的运动关系和受力分析
开合距离2b与液压缸行程a关系为
(1)
驱动力P与夹紧力F的关系为
(2)
以驱动力P最小和行程a最短为原则建立多目标优化模型,目标函数为

(3)
约束函数为
(4)
根据表1 指标和实际设计情况,为简化计算,确定已知量:b=60 mm,d=18 mm,r=12 mm,α=600,μ=0.3。此时设计变量为l1、l2、γ及β共4个。
利用Matlab软件计算并圆整可得:液压缸行程最小为20 mm时,可以满足抓取卡爪120 mm的开合范围。
3 运动仿真分析
采用Matlab软件建立机械臂的仿真模型,并对仿真模型进行校验。首先,校验机械臂各关节转角为0时,其总长与Solidworks软件设计的三维模型总长的一致性,校验结果均为1.068 m,此时机械臂总长仿真校验结果见图4。
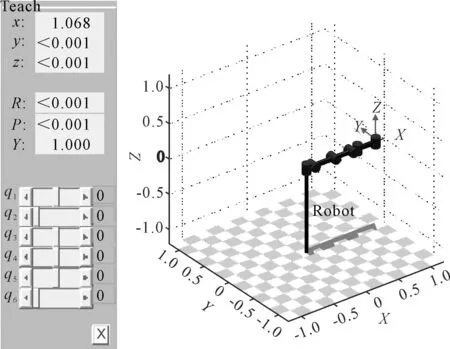
图4 机械臂总长仿真校验结果
然后,校验机械臂由一个位置运动到另一个位置时的位置姿态,为使计算简便,选取校验初始位置A各关节转角为0°,目标位置B关节转角为[0pi/4-pi/60pi/60]。此时,机械臂正运动计算的末端位置矢量为
(5)
仿真校验结果为
(6)
此时机械臂位置仿真校验结果见图5。
仿真模型结果与D-H参数法正运动求解结果高度一致,验证了机械臂仿真模型是正确的,可以借助仿真模型对活动关节的运动轨迹进行分析,探讨活动关节在运动过程中的位置、速度和加速度变化特征和规律。
假设各关节转角为0时为初始位置A点,关节角度为[pi/6pi/-pi/6pi/6pi/6pi/2]时为目标位置B点,由A点至点B,仿真的机械臂运动轨迹动画见图6,空间轨迹见图7。
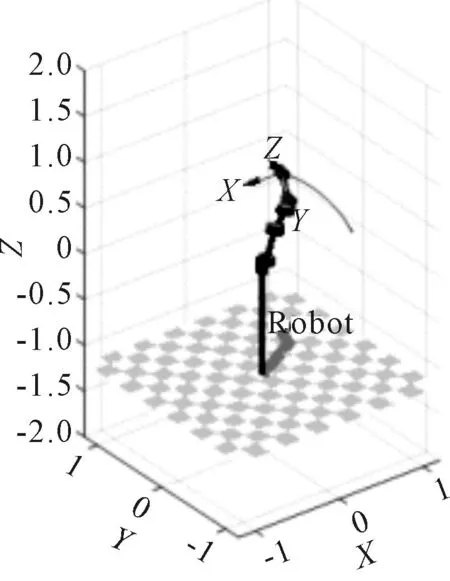
图6 机械臂运动轨迹动画
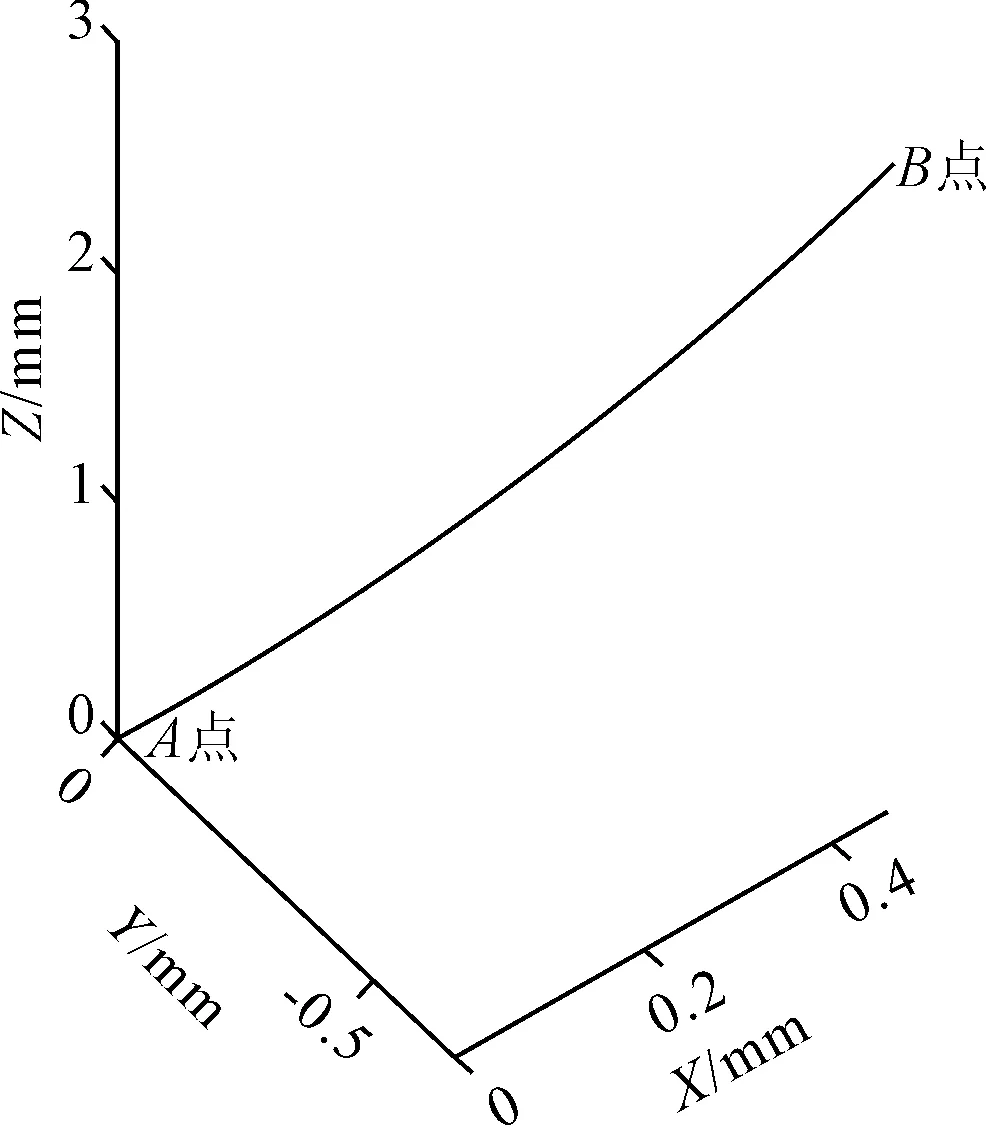
图7 机械臂空间轨迹
由A点至B点,仿真的机械臂各关节位置变化见图8,速度变化见图9,加速度变化见图10。
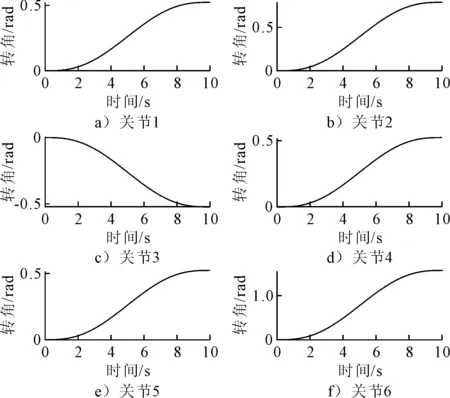
图8 机械臂各关节位置变化
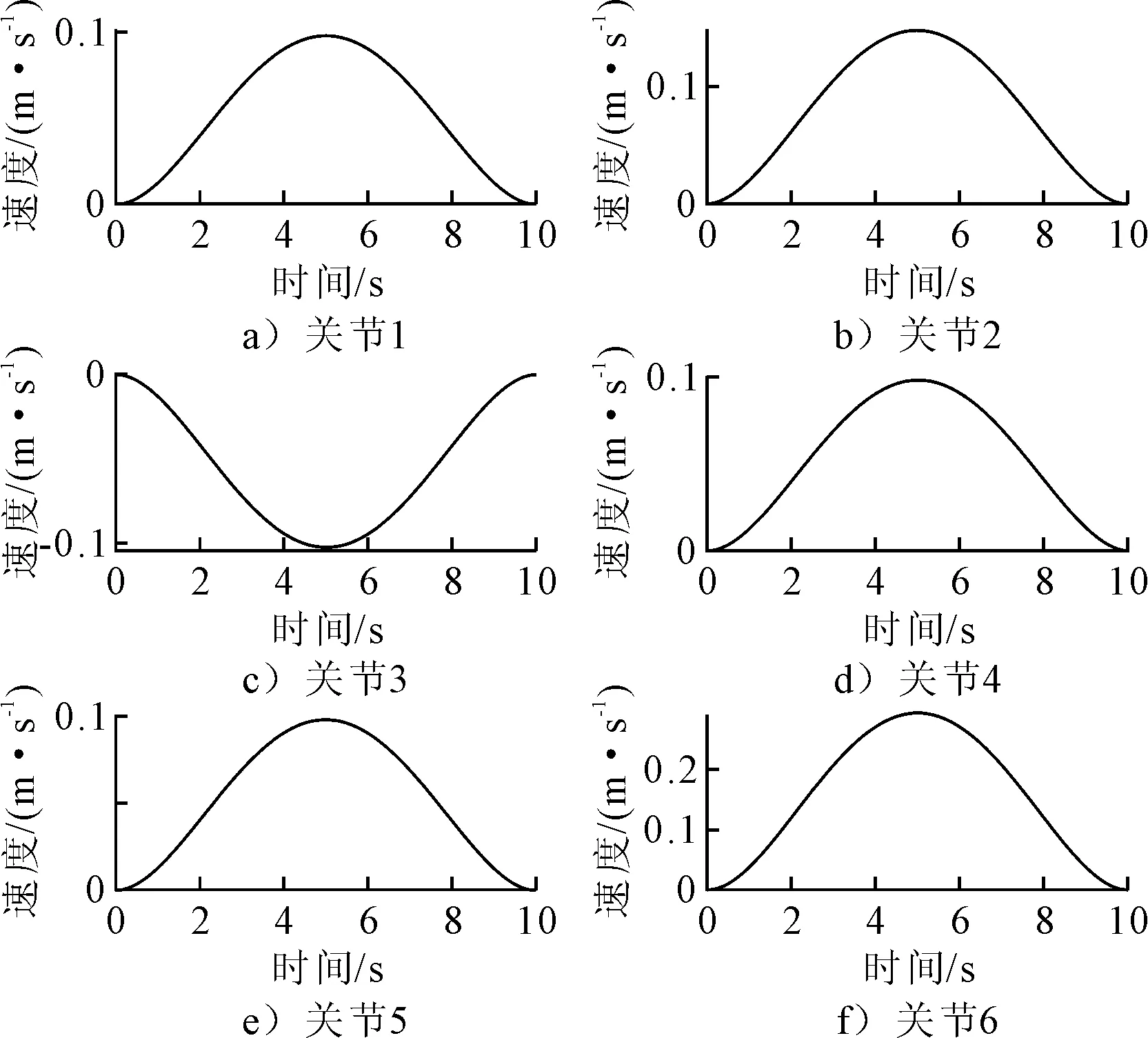
图9 机械臂各关节速度变化
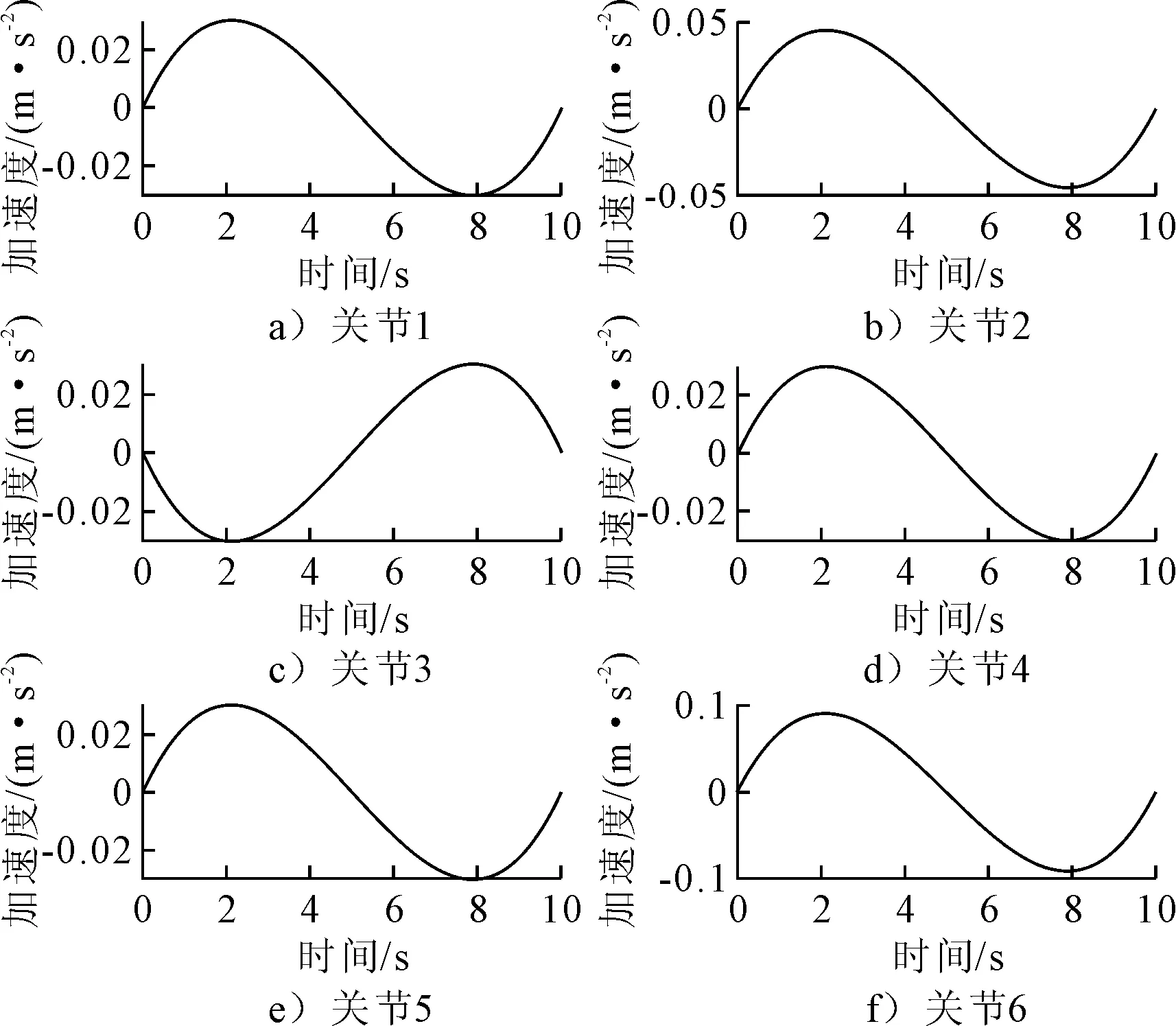
图10 机械臂各关节加速度变化曲线
图6~10表明,由A点至B点,机械臂各关节的角位移运动平稳,其速度和加速度曲线无突变,呈现正弦规律且相互对应,光滑平顺。
4 试验验证
为验证结构设计和仿真的合理性,搭建机械臂的功能样机,抓取卡爪的开合功能验证见图11。

图11 抓取卡爪开合运动
机械臂单自由度第六关节的周向旋转运动见图12。

图12 第六关节周向旋转运动
机械臂单自由度第五关节的偏转运动见图13。

图13 第五关节偏转运动
机械臂抓取卡爪开合功能和单关节运动验证完成后,进一步进行机械臂的多关节联动验证,机械臂多关节联动验证见图14。

图14 机械臂多关节联动验证
功能样机验证表明:设计的七功能水下液压机械臂抓取卡爪可实现120 mm的开合范围,各活动关节的运动范围满足设计指标,并且运动过程中各关节的加减速性能良好。
在上述试验的基础上进行结构优化设计,搭建工程化样机,搭载设计的七功能机械臂的ROV样机见图15。
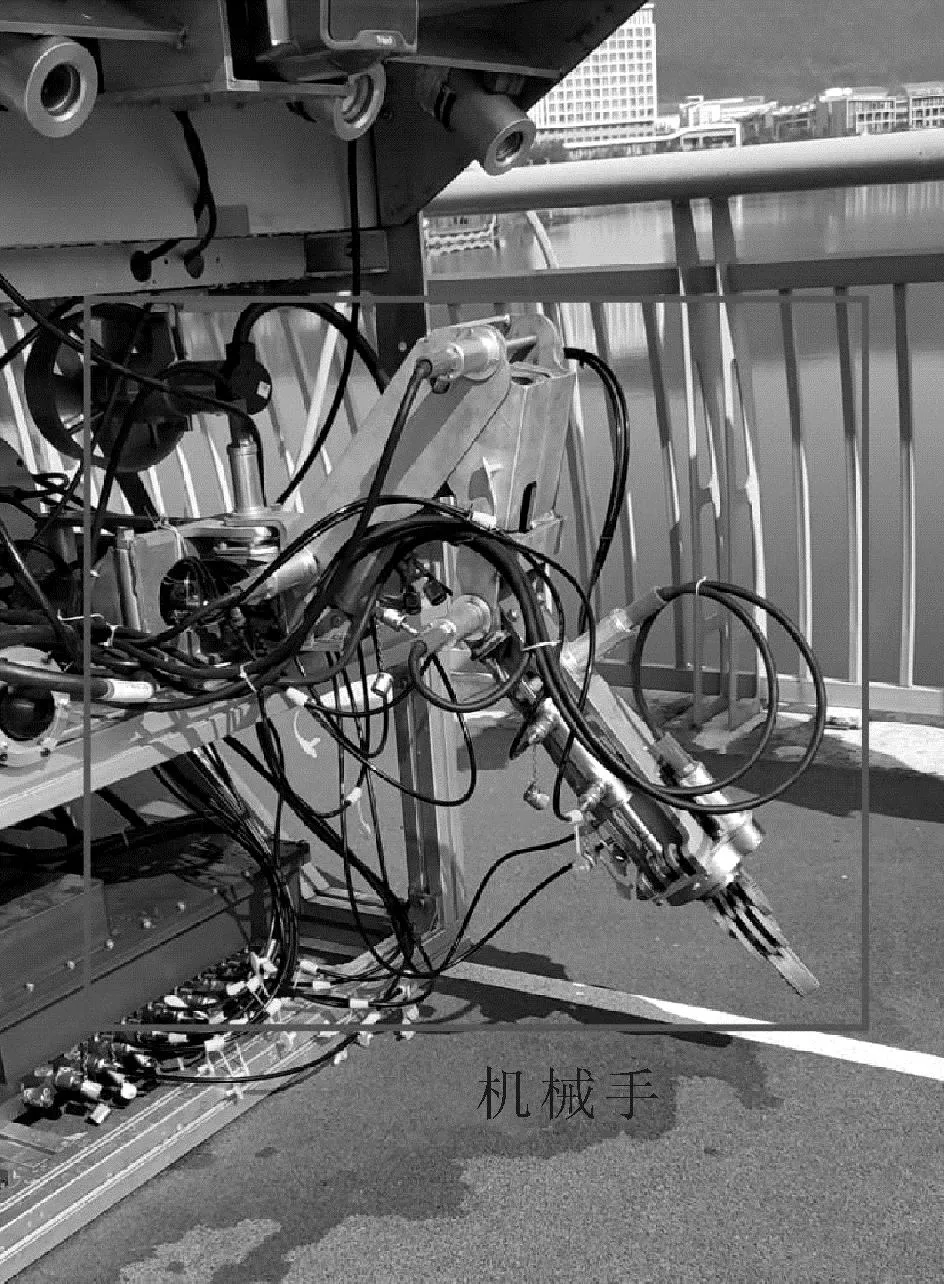
图15 搭载机械臂的ROV样机
在ROV设备上输入机械臂抓取卡爪的开合控制指令,抓取卡爪可以按照指令完成开合动作,同时机械臂各关节可以根据控制指令随动动作,机械臂第一关节和第二关节运动见图16。
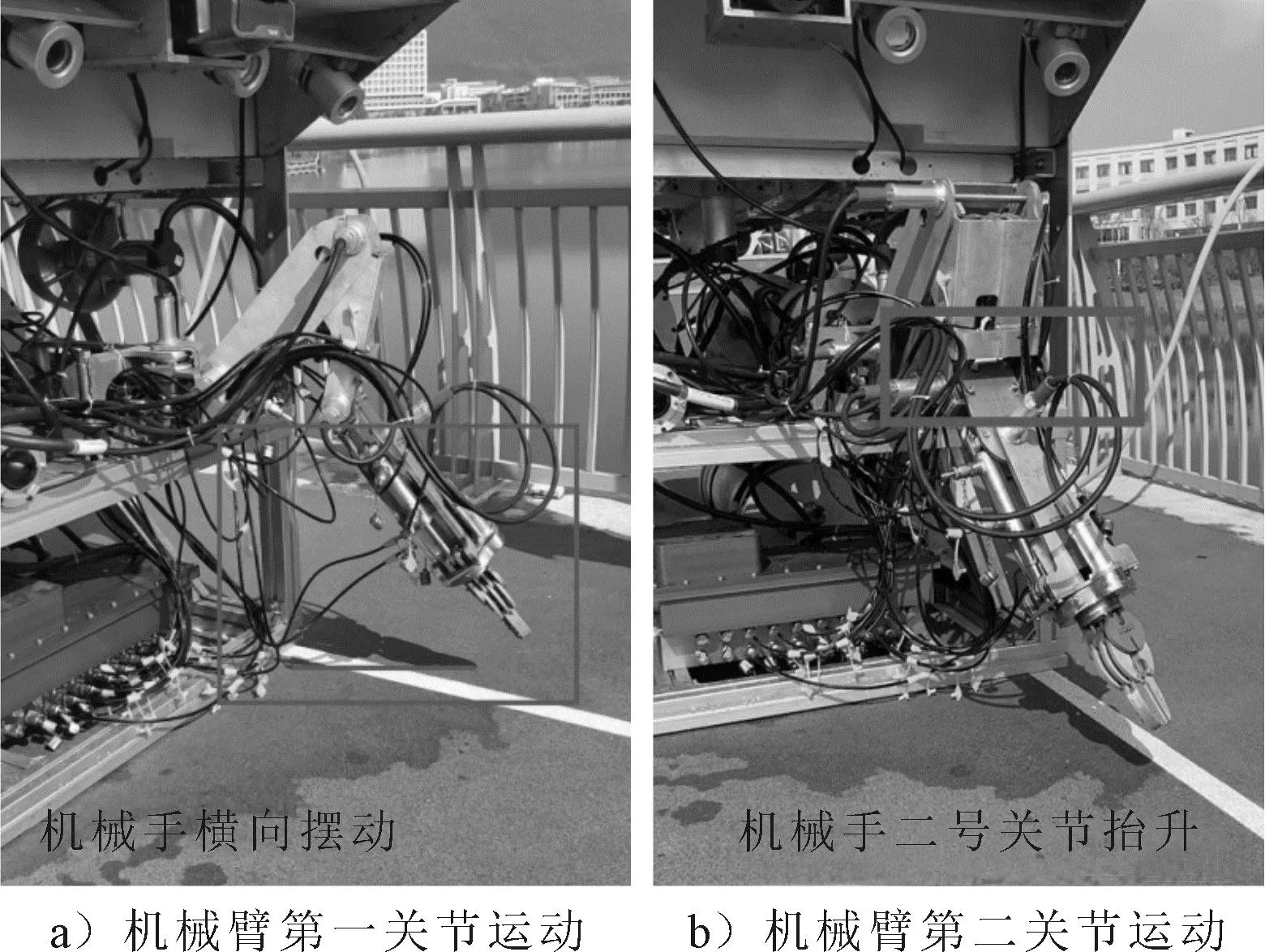
图16 机械臂第一关节和第二关节运动
试验表明,设计的7功能水下液压机械臂可以满足设计指标,符合ROV的水下作业要求。
5 结论
1)利用多目标优化模型设计抓取卡爪,求解的液压缸驱动最短行程20 mm时,可满足抓取卡爪120 mm的开合范围。
2)仿真分析结果表明机械臂6个活动关节的位置、速度、加速度曲线在全部限界范围内均平滑、无突变,运动稳定。
3)抓取卡爪开合范围符合设计指标要求,单自由度和多自由度陆上试验及水下试验验证了机械臂含抓取卡爪的结构设计是合理的。
为进一步扩展ROV的作业能力和作业范围,后续将开展ROV上搭载双机械臂的协同运动研究。
