刮板输送机直线度检测方法研究
2024-02-26薛金国
薛金国
(潞安化工集团左权阜生煤业,山西晋中 032600)
针对于煤炭的开采,影响其开采过程的因素有很多,其中,刮板输送机的直线度就是其众多影响因素之一。在煤炭的开采过程中,一旦发现该直线度不符合开采过程中的要求时,将会对其开采工作产生一定的影响,同时,还会影响刮板输送机的使用寿命,使其寿命大大缩短,更有甚者,还会产生较为危险的安全事故。因此,在此基础上,在煤炭的开采过程中,需要及时对刮板输送机中的直线度进行实时监测,同时,还需要对其进行相应的控制,确保该设备在运行过程中,能够稳定、可靠,进而提高其在煤炭开采中的工作效率。
1 刮板输送机的结构及形态表征
1.1 主要结构
就目前而言,当下在进行煤矿开采过程中,其刮板输送机的构成主要如图1所示。
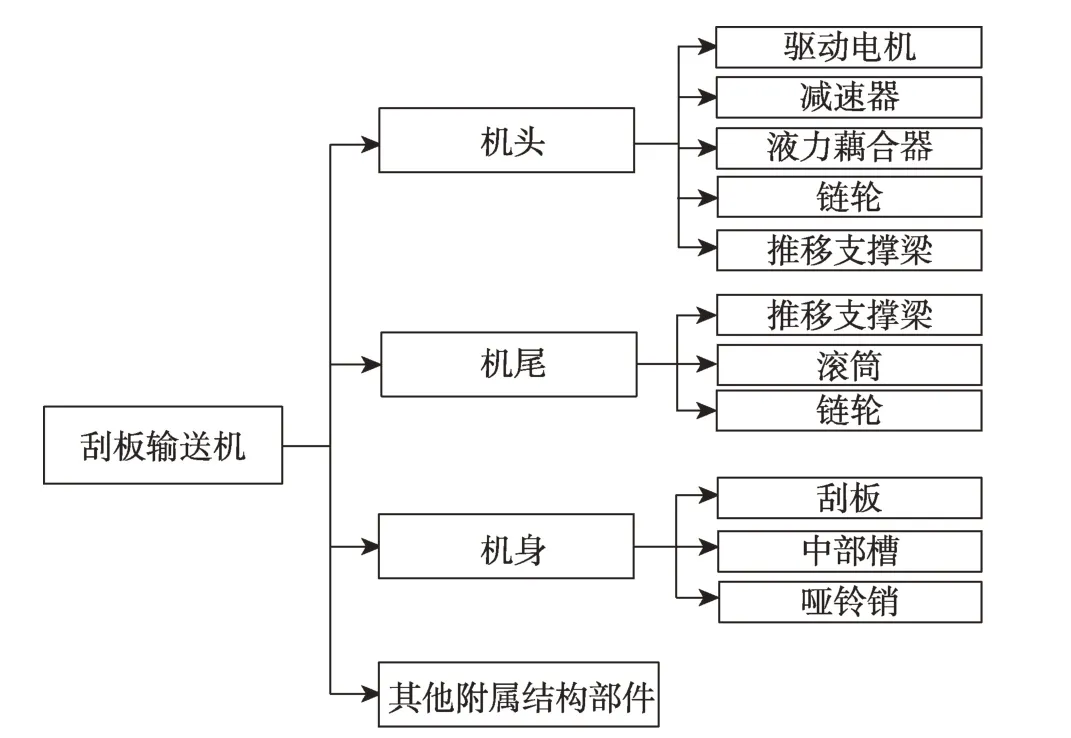
图1 刮板输送机的主要构成
随着当下时代的不断发展,相应的在煤矿开采过程中,其机械化水准也在不断的发展提高中,目前,在煤矿开采过程中,刮板输送机中的长度也在不断的增加中,当下,其最长长度约为450m。
1.2 形态表征
对于刮板输送机的形态表征,主要是指其在工作过程中表现出来的一种形态。同时,又由于在刮板输送机的整体构成中,占据主要部位的则是机身,因此,所说的刮板输送机的形态表征,实际上就是其内部机身所呈现出来的一种形态。其中,机身的主要构成部位是中部槽,在中部槽与中部槽之间,采用铰接的形式进行连接,其连接的部件则是哑铃销。在实际工作过程中,机身中的中部槽,其结构分布比较对称,即:前后、左右均属于对称结构,基于此,在对其进行形态表征的研究时,其研究节点的选取可以是该结构两边的中心部位。刮板输送机的形态表征状况,具体如图2所示,在图中,将每一个节点进行连接以后,形成一个曲线,该曲线即是刮板输送机的形态表征曲线。
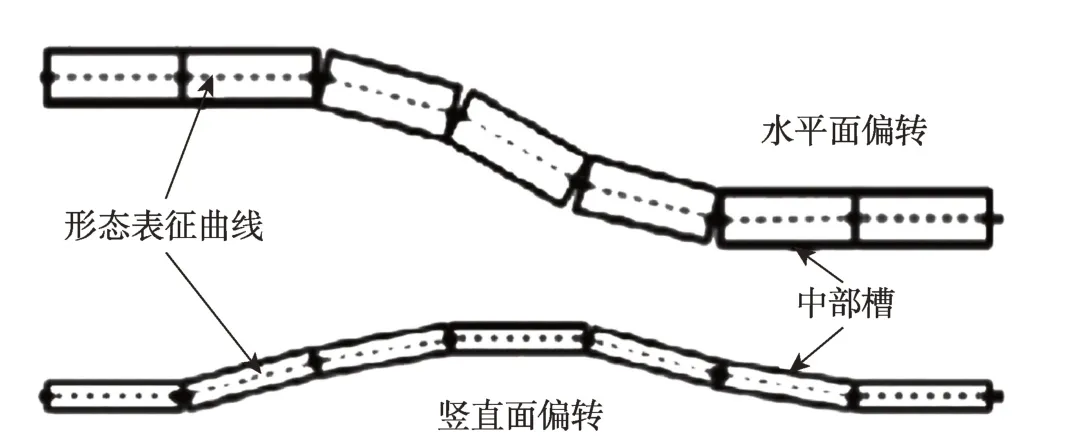
图2 刮板输送机形态表征
2 刮板输送机直线度检测方法
刮板输送机在工作过程中,主要的功能是在轨道上进行来回运动,而这也是采煤机在实际工作中的主要体现。基于此,能够发现采煤机在进行实际工作时,其工作轨迹刚好是能够体现出刮板输送机的直线度。在实际的煤炭开采过程中,在机身中,中部槽与中部槽之间,是通过哑铃销实现的,其角度偏差一般不会大于2°。本文在研究过程中,所采用的原理是航位推测,之后,根据其实际工作状况以及所选用的中部槽的实际相关尺寸,开始实时监测刮板输送机的直线度。但是,在实际对其监测过程中,还将会用到捷联惯导装置,由于该装置在使用过程中,会存在一定的安全隐患,因此,为了确保在使用该装置的过程中,能够安全可靠,因此,需要在使用过程中,将该装置安放在防爆箱中,同时,还需要再将其进行固定,一般固定的位置是在采煤机上,与此同时,为了监测其在轨道上的工作速度,还需要在其工作的轨道上,安装有相应的加速度传感器。
所谓的航位推测技术,其主要是依据某一时刻中,某点所处的位置坐标,之后,再根据测量出的该点在工作中移动的方向以及移动的距离,进而预测出在下一时刻里,该点的具体位置坐标。捷联惯导装置的内部主要含有的零部件主要有:线加速度器(3 个)、速率陀螺(3 个)、微型计算机,基于此,再结合相应的软件系统,就能够实现对其精确定位。刮板输送机监测直线度的具体原理示意图如图3所示。
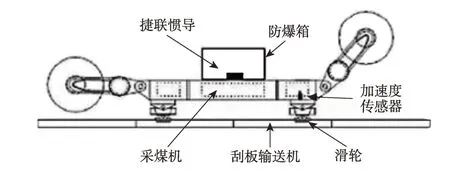
图3 刮板输送机检测原理
在实际的工作过程中,会产生明显振动的装置有:回采工作面采煤机、刮板输送机以及液压支架,这些装置在进行工作时,将会影响测量结果的精准性。那么,为了避免此种现象带来的后果,提高其测量的精确性,就需要将测量的结果在系统内置算法的基础上,再次进行傅里叶变换,在变换过程中,将剔除掉振动噪声带来的影响。
依据Rodrigues 算法,能够计算出一些向量数据,如根据已知的某空间向量,再依据该算法,就能够计算出该向量围绕着另外一个向量旋转一定的角度以后的向量值。因此,在该算法的基础上,就能够依据所收集以及监测到的一些数据,计算出该采煤机的相关状态,在此基础上,就能够得出此过程中刮板输送机的状态如何。在对相关数据进行计算时,其选取的基础节点为:中部槽两边的中点处,根据所选择的参考节点,就能够计算出其他节点中的详细信息资料。中部槽的规格尺寸属于已知,在结合航位推测理论,并且,依据中部槽的相关尺寸,将其长度,作为相邻节点与节点之间,在水平方向上的步长;而其在竖直方向的步长,则选择的是其厚度尺寸;而方位角的选择,则是依据节点之间在水平以及垂直方向中的偏角。要想实现对中部槽间歇状态的计算,其主要的依据有2个,一个是通过加速度传感器所监测到的相关数据信息,另外一个则是分解模型,之后,再根据航位推测原理,最终能够对刮板输送机的机身状态状况进行有效的识别。
3 刮板输送机直线度控制方法
本文在对刮板输送机的直线度进行研究的时候,是在PID控制技术的基础上进行实现的。因为在实际的煤炭开采过程中,其工作环境相对来说比较复杂多变,因此,在矫正机身时,用到的一些参数,如:液压缸中的液压油压力、流量等,这些统统属于变量,因此,如果用恒定的PID 参数完成工作是不可行的。基于此,为了提高其工作效率,在模糊算法的基础上,优化以及调整了PID 中的相关参数,之后,在此基础上,就能够较为精确地控制不同液压缸中的流量等,进而保障能够精确掌控机身的位置,保障机身几乎均在一条水平线上。因此,刮板输送机在对其直线控制过程中,具体的控制过程如图4所示。其中,在该图中,中部槽节点的编号分别为:i-1,i,i+1;而对应节点中,需要被调整的位移量分别为:Δyi-1,Δyi,Δyi+1。
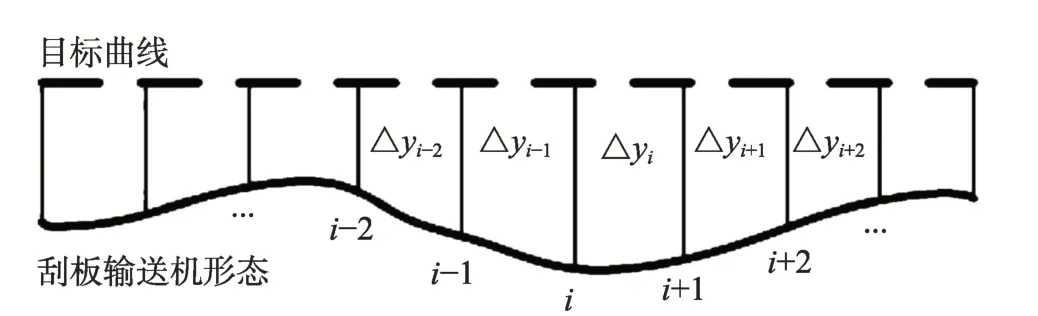
图4 刮板输送机直线度控制过程
在控制系统中,在进行下一步的指令下达时,其依据就是计算出的调整量,基于此,就能够实现液压缸的运动,促使刮板输送机的机身能够在正确的位置上进行工作。要想实现以上一系列的运作,就需要在此过程中,实时监测刮板输送机的直线度,与此同时,还需要将监测到的相关结果在控制器中进行反馈,之后进行不断的循环往复,最终使得直线度能够符合相关的要求。上述一系列的调整过程,即是闭环控制。在PID技术上的直线度控制原理具体如图5所示。
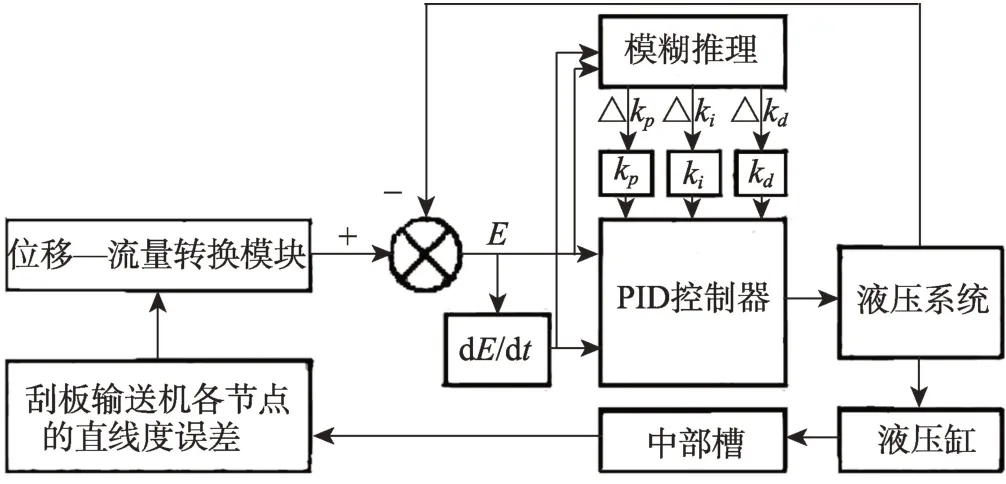
图5 基于PID技术的直线度控制原理
4 检测方法的工程应用研究
4.1 工程概况
依据煤矿的实际开采工作,将监测直线度的方法应用在其中,同时,并对其最终检测结果进行检测。在本文的研究中,所选用的设备分别为:MG900/2395-WD 型号的采煤机、ZY16000/23/43D 型号的液压支架(141 架)、SGZ1250/3x1000 型号的刮板输送机。除此之外,还包含有SZZ1350/525 型号的转载机、PLM450型号的破碎机。
4.2 直线度检测精度对比
为了验证本篇文章研究结果的精准性,分别采用两种方法对其进行检测,第一种是在回采工作面中,没有矫正刮板输送机;第二种则是采用了PID控制技术,监控直线度,除此之外,还利用全站仪检测了刮板输送机的平直度,之后,对获取到的相关信息进行不同方位的对比,即:水平和竖直。在整个的检测过程中,其所选用的基准则是位于中间部位的75号支架,最终发现,最终测量出来的结果,无论是在水平还是在竖直方向上的直线度,均存在一些偏差。采用两种检测方法对直线度进行检测以后,其最终检测结果具体如图6所示。
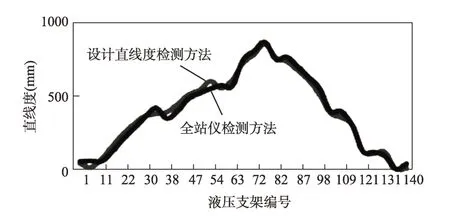
图6 两种直线度检测方法结果的对比
由图6 能够得知,这两种不同的检测方法,其最终的检测结果基本上均相同,但是仍存在一定的偏差,通过图6 能够看出,其最大偏差在50mm 以内,表明在对其进行检测时,是正确的。根据得出的较为合理的检测结果,对刮板输送机进行矫正处理。
通过实际案例,验证刮板输送机直线度控制方法是否真是可靠。在系统运作初期,先不使用直线度控制系统,之后,经过一段时间以后,开始使用该系统,工作一段时间以后,整个系统均关闭,之后对其进行验证,具体所得的结果如图7所示。其中,前1~3h以及后8~10h 没有使用直线度控制系统;中间4~7h 直线度控制系统开始使用。根据图7能够看出,设备的直线度在使用该系统前后,其直线度偏差已经从600mm降到了300mm。
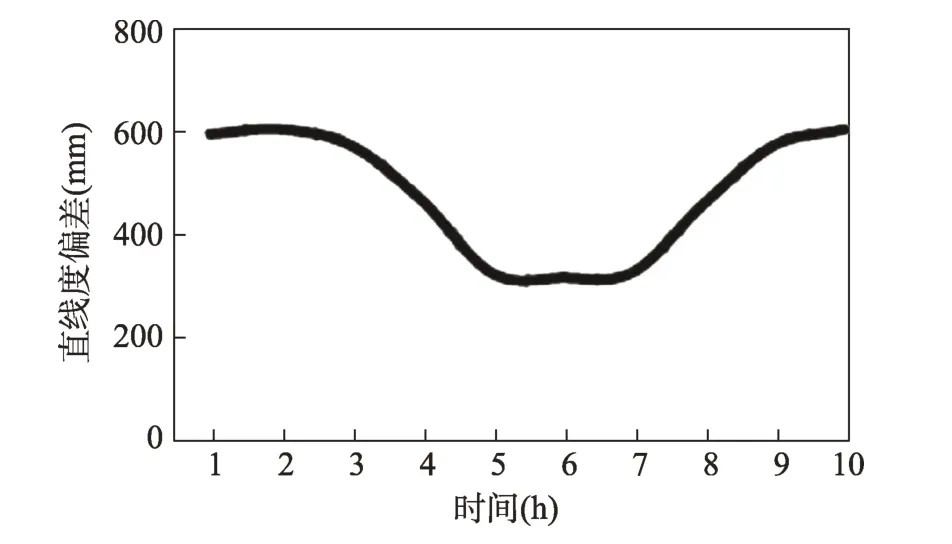
图7 直线度控制系统开启前后的直线度偏差
5 结语
在采煤机中,安装有捷联惯导装置,同时,在航位推测原理的基础上,实时监测设备的姿态,之后根据检测的结果,及时地进行调整,以上便是刮板输送机直线度的控制方法。根据检测得出的相关信息,发现存在一定的振动及噪声,因此,需要采用傅里叶变换进行降噪处理,进而确保最终计算结果的精准性。在对机身的姿态进行调整时,所选用的方法是在模糊算法的基础上的PID 控制参数动态调节,其最终目的就是提高机身的直线度。对直线度控制系统开启前以及开启后的状况进行对比,发现该系统在对机身的直线度进行改进的时候,效果较为明显。
