柑橘采摘软体末端执行器的设计与试验
2024-02-22黎梦婷谭云峰唐座亮
黎梦婷,陈 霖,王 键,谭云峰,胡 森,唐座亮
(四川农业大学 机电工程学院,四川 雅安 625014)
从20 世纪80 年代开始,各国针对不同种类的柑橘研发了不同的采摘末端执行器,推动了该领域的发展[1]。已研制的柑橘采摘末端执行器大多由刚性材料构成,存在柔顺性差、复杂环境适应力差、设备昂贵、易损伤采摘对象等问题[2-3]。软体机械手的出现为解决刚性采摘末端执行器存在的问题提供了新思路和方法。软体机械手不仅能克服这些缺点,还能“一手多用”[4]。
目前,软体机械手的设计与研发受到了国内外学者的青睐。中国科学技术大学基于弹性硅胶驱动器的原理研制了1 款蜂巢结构的软体机械手[5];俄亥俄州立大学的Yu She[6]利用形状记忆合金制作了1 款软体机械手;巴黎综合理工大学[7]利用电活性聚合物作为2 根手指的驱动抓取一些小质量的物体;2020 年俄亥俄州立大学[8]基于绳线驱动研制了1 款由三指组成的变刚度软体机械手。软体机械手应用与农业方面的研究还处于初始阶段。意大利Muscato 等[9]采用螺旋式排列橡胶研发了柑橘软体采摘手。吉林大学肖英奎等[10]仿人手指骨架,并用橡胶制作表皮设计了1 款黄瓜采摘软体机械手。河北农业大学的李娜等[11]在手指单元内添加柔顺构件研发了1 款草莓采摘末端执行器。
为了使柑橘机械化采摘达到更好的效果,结合信息传感技术和智能控制理论,将软体机械手运用到柑橘采摘中将是未来采摘末端执行器必然发展趋势[12-15]。本文将采用软体材料制作软体手指来夹持柑橘,并配合剪切机构实现柑橘的采摘,建立软体手指弯曲变形力学模型,借助有限元仿真进行响应面分析,确定最优组合参数,制作实物试验,研究抓取的效果。
1 采摘软体末端执行器设计
1.1 采摘软体末端执行器结构设计
采摘软体末端执行器总体结构设计如图1所示。

图1 采摘软体末端执行器整体结构图Fig.1 Overall structure diagram of picking software endeffector
其中软体机械手由软体手指、可调手掌、连接件组成。为提高采摘软体末端执行器的通用性,软体机械手与剪切机构设计为可拆卸式,并且安装支架上设计有2 个安装孔。采摘软体末端执行器通过软体机械手与剪切机构的配合,从柑橘侧面夹持柑橘并剪断果梗,其工作原理如下:将采摘软体末端执行器运送到采摘目标旁,启动软体机械手驱动装置,驱动软体机械手手指弯曲进行柑橘果实的夹持。当夹持力达到设定值时,启动步进电机,由丝杆带动剪刀闭合与张开,从而实现柑橘果梗的剪切。
1.2 软体手指设计
纤维增强型和多腔体型是常见的气动软体手指结构[16]。由于纤维增强型手指弯曲角度相比多腔体型手指小,为适应不同形状大小的果实,本文选用弯曲角度较大的多腔体型手指进行设计。软体手指气囊形状由矩形与半圆形组合而成。为了限制手指底部延伸,从而实现手指的弯曲,本文在手指底层中心添加了1 层打印纸[17],软体手指结构设计如图2 所示。

图2 软体手指结构图Fig.2 Soft finger structure diagram
以赣南脐橙为试验对象进行几何特性的测量。测量100 个赣南脐橙纵径(沿果梗方向直径)和横径(垂直果梗直径方向直径),得到纵径与横径平均值分别为77.96、72.55 mm。为保证软体机械手能抓持不同尺寸大小的柑橘,本文设计软体手指总长L=95 mm、气囊总长度l=83 mm。将气囊高度h2、限制层厚度s、气室厚度L3等软体手指结构参数作为结构变量,软体手指结构参数如表1 所示。
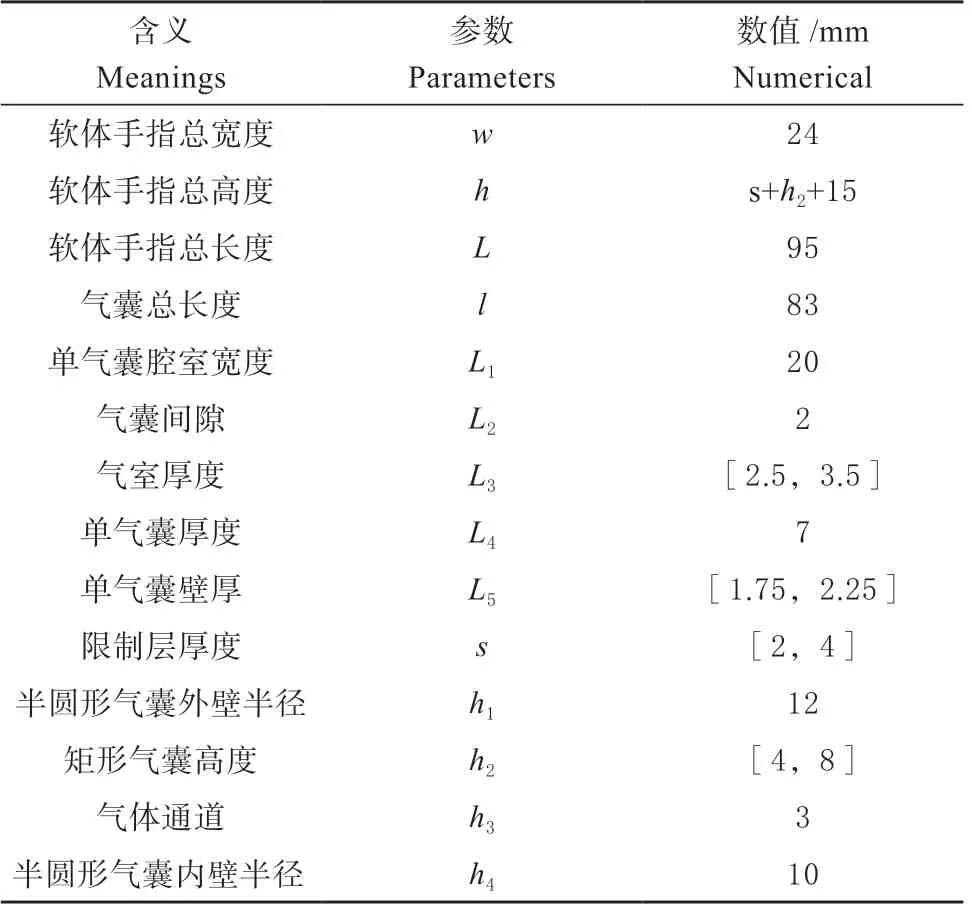
表1 软体手指结构参数Table 1 Soft finger structure parameters
2 软体手指力学建模
2.1 手指材料超弹性本构模型
在对软体手指进行力学建模分析时,首先要明确制作软体手指选用材料的力学特性。Yeoh 模型[18]是基于应力—变形关系建立的硅胶本构模型,假设硅胶材料在变形过程中外力做的所有功全部转化为弹性能储存在硅胶内部,用应变能密度函数W表示为:
其中:W为应变能密度函数;Ii为变量张量,无量纲;λi为空间各方向上的主伸长比;γi为主应变,无量纲。
由于硅胶材料具有不可压缩的特性,单轴拉伸时假设手指在宽度方向上没有形变且手指底部材料不发生变形,可得:
式中:l为气囊总长度,mm;s为限制层厚度,mm;φ为软体手指弯曲角度,rad。
联立公式(2)~(4)可得:
根据Yeoh 本构模型并结合式(1)~(7),选用典型二项参数形式来表示应变能密度:
式中:C10=0.11 MPa、C20=0.02 MPa 为材料参数[19]。
结合式(1)~(8),得到主应力σ与主伸长比λ1之间的关系为:
2.2 软体手指弯曲变形力学建模
软体手指在充气压强下的变形不是简单的圆弧变形,因此在对软体手指弯曲角度变形力学建模分析时需要做一定的假设。在常曲率假设下,一定气压P作用在软体手指上弯曲形成的圆弧所对应的圆心角φ如图3 所示。

图3 软体手指弯曲角度Fig.3 Soft finger bend Angle
单个气囊膨胀时(如图4 所示),气压P作用在气囊腔体侧面上的作用力对手指底面处产生的力矩MP为:
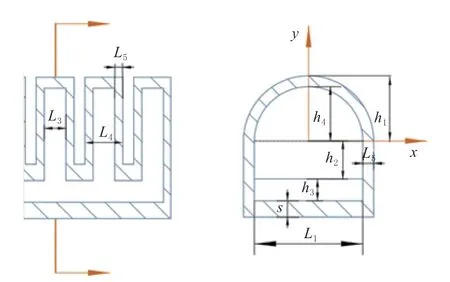
图4 软体手指结构参数Fig.4 Soft finger structure parameters
式中:H为软体手指限制层厚度与矩形气囊高度、气体通道之和,mm;P为充气压强,MPa。
假设软体手指气囊内部应力σ均匀分布,软体手指气囊基体应力σ对底面处产生的力矩M为:
式中:MS为限制层与矩形气囊基体对手指底面力矩;M1为半圆形气囊基体对手指底面力矩。
由于软体手指气囊基体应力σ均匀分布的假设存在一定误差,因此本文引入修正系数K对软体手指气囊基体应力产生的力矩进行修正,由力矩平衡可知:
联立式(10)~(15)即可得出充入手指内气压P与软体手指气囊基体应力σ之间的关系式:
联立式(1)~(16)得到充入软体手指的气压P与软体手指弯曲角度φ之间的理论关系式为:
3 基于仿真的软体手指参数优化
3.1 响应面试验结果与分析
采用ANSYS 有限元静力学仿真进行气囊高度、限制层厚度、气室厚度单因素分析,确定气囊高度范围为5.0 ~7.0 mm、限制层厚度范围为2.0 ~4.0 mm、气室厚度范围为2.5 ~3.5 mm 进行中心组合试验效果最佳。将气囊高度(A)、限制层厚度(B)、气室厚度(C)作为试验因素,以软体手指最大弯曲角度(Y)为优化目标,进行3 因素3 水平中心组合试验,试验因素水平如表2 所示。通过Design expert 11 中的Box-Behnken 进行试验设计,具体试验设计与结果如表3 所示。

表2 试验因素水平Table 2 Test factor level table

表3 试验设计方案与结果Table 3 Orthogonal test table and test results
软体手指弯曲角度的方差分析结果如表4所示。由表4 可知,该回归模型极显著(P<0.01);模型失拟项不显著(P>0.05),模型二次项拟合程度高;气囊高度(A)、限制层厚度(B)、气室厚度(C)、BC对软体手指弯曲角度有极显著影响(P<0.01),AB、AC、B2对软体手指弯曲角度有显著影响(P<0.05);该模型能解释96% 以上的响应变化(R2=0.968 4);由F值可得出对弯曲角度影响的主次顺序为:A>B>BC>C>AB>B2>AC,软体手指弯曲角度与各试验因素的回归方程如式(18)所示:
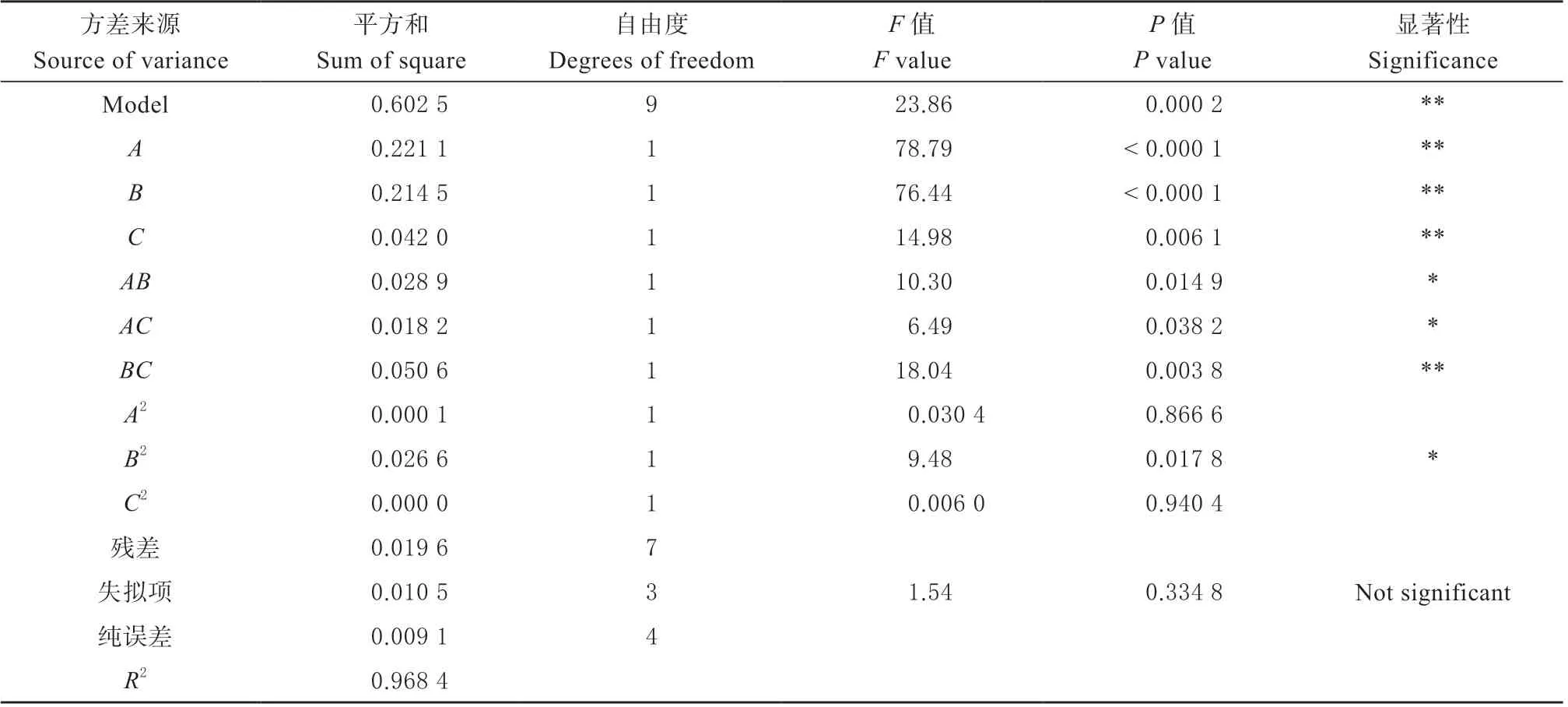
表4 软体手指仿真直径方差分析表Table 4 Analgsis table of the variance of the software finger simulation diameter
通过软体手指弯曲角度的回归模型,使用Design Expert 11.0 软件中 Optimization 功能进行优化求解,得到最优组合参数为:气囊高度为6.926 mm、限制层厚度为3.654 mm、气室厚度为2.882 mm,此时软体手指弯曲角度为6.137 rad。为便于后续实物加工,本文取气囊高度为7 mm、限制层厚度为3.5 mm、气室厚度为3 mm。
3.2 软体手指力学模型修正
为得到力学理论关系式中的修正系数K,将优化后的软体手指进行ANSYS 有限元仿真,仿真结果如图5 所示。

图5 不同正压下软体手指弯曲状态Fig.5 Soft finger bending under different positive pressure
以仿真得到的弯曲角度φ为横坐标,充气压强P为纵坐标,使用MATLAB 绘制成散点图并拟合出曲线公式,如图6 所示。
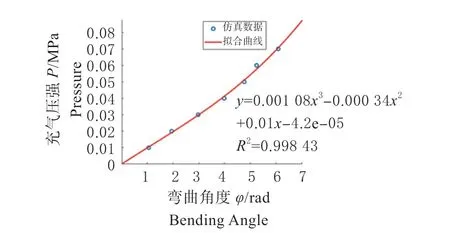
图6 MATLAB 拟合仿真结果曲线Fig.6 MATLAB fitting simulation results curve
结合表1 与优化得到的结构参数,将拟合公式与理论公式(17)中相同次数项进行对比,得到修正系数K为0.7。充气压强P与弯曲角度φ之间的关系为:
4 软体手指的制作及弯曲性能试验
4.1 软体手指的制作
结合本文设计的软体手指结构特点,选用平板印刷法来制作软体手指,如图7 所示。

图7 软体手指的过程图Fig.7 Process diagram of soft fingers
将Dragon skin 30 的A、B 胶按1∶1 的比例倒入烧杯中进行混合并搅拌均匀,放入真空脱泡桶中进行除泡。将脱模剂喷在模具内表面,再将脱泡后的硅胶沿玻璃棒缓慢倒入模具中。在硅胶倒入指底底模1/2 时将事先准备好的1 张打印纸平铺在硅胶上,再继续倒入硅胶直至填满整个指底底模。浇铸完以后将其放入电热恒温鼓风干燥箱中,直至硅胶完全固化成形。将取出的手指气囊部分与指底进行粘合,再将其放入电热恒温鼓风干燥箱中,温度设置为30 ℃进行固化。将合为一体的软体手指从指底底模中脱模出来。
4.2 软体手指弯曲性能试验
本文设计的软体手指弯曲性能试验系统,如图8所示。将弯曲传感器贴在软体手指底面上,通过气泵提供气源。当软体手指充气时,手指气囊膨胀发生生弯曲,贴在手指底面的弯曲传感器通过Arduino UNO-R3 单片机将数据传到上位机上,读取得到不同气压下的软体手指弯曲角度如表5 所示。

表5 软体手指弯曲变形试验结果Table 5 Bending deformation test results of soft fingers

图8 软体手指弯曲性能试验简图Fig.8 Experimental sketch of flexural performance of soft fingers
图9 为软体手指力学理论模型、有限元仿真以及试验所得的弯曲角度与充气压强结果对比图。

图9 理论、仿真及试验结果对比图Fig.9 Comparison of theoretical, simulation and experimental results
由图9 可知,软体手指的弯曲角度随着压强的增大而呈非线性增大;试验结果小于仿真与力学模型结果,但总体趋势一致;压强小于0.04 MPa 时三者结果相近,当压强大于0.04 MPa 时,相同气压下力学模型弯曲角度明显比仿真结果与试验结果大,其原因可能是力学模型是在模型简化以及一定假设的情况下建立的,没有考虑大气压下限制层膨胀会限制手指弯曲。
5 柑橘夹持损伤有限元仿真
5.1 软体手指刚度有限元仿真
由前文可知软体机械手是从侧面接近柑橘并夹持柑橘,如图10(a)所示。假设手指充气后包络抓取柑橘且柑橘不与手掌接触,其受力分析如图10(b)所示。
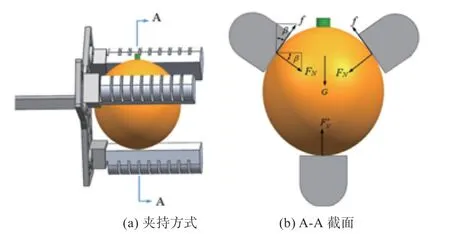
图10 软体机械手夹持柑橘的方式Fig.10 The way the soft manipulator clamps the citrus
由图可得:
式中:G为柑橘重力,N;FN为位于两侧的手指作用在柑橘上的夹持力,N:FN'为位于底部的手指作用在柑橘上的夹持力,N;f为两侧的手指作用在柑橘上的摩擦力,N。
3 根 手 指 呈120° 分 布,由 几 何 关 系 可 得β=30°,由试验得到μ=0.66,通过式(20)与式(21)可知FN'<G。ANSYS 有限元仿真中直接将柑橘重力施加在软体手指底面上。测量得到柑橘最大的重量为 240.8 g,为保证软体手指能刚度能支撑住柑橘,取施加在软体手指上的重力G为3 N。通过仿真,发现软体手指在 0.03 MPa 时开始收敛。压强为0.03、0.035、0.04 与0.07 MPa 时的仿真变形结果如图11所示。

图11 软体手指刚度仿真结果Fig.11 Simulation results of soft finger stiffness
最大压强0.07 MPa 下软体手指最大等效应力为2.36 MPa,没有超过手指材料拉伸强度3.45 MPa,因此手指负载3 N 不会破坏材料;由于在实际操作中位于柑橘两侧还有软体手指会对其进行夹持,因此实际操作中位于柑橘底部的软体手指承受的力要小于仿真时所承受的力,充气压强为0.035 MPa 时软体手指的刚度就能符合实际操作。
5.2 有限元模拟软体手指夹持柑橘
试验得到柑橘果肉及果皮物理及力学特性参数如表6 所示。

表6 柑橘果肉及果皮特性参数Table 6 Characteristic parameters of citrus pulp and peel
为了便于计算本文将模型简化1 根软体手指对柑橘夹持。在充气压强为0.035 MPa 时,得到的仿真结果如图12 所示。

图12 0.035 MPa 时软体手指夹持柑橘仿真结果图Fig.12 Simulation results of holding citrus with soft fingers at 0.035 MPa
由图12(a)可知,最大等效应力为0.537 MPa,发生在软体手指指尖附近,而不是在柑橘上;由图12(b)可知,充气压强为0.035 MPa 时,果肉的最大等效应力约为0.001 35 MPa。由于果肉最大等效应力位于柑橘与手掌接触附近,因此实际软体机械手进行柑橘夹持时对果肉产生的最大等效应力约为0.004 05 MPa;由图12(c)可知,果皮最大等效应力为0.118 MPa,最大等效应力同样出现在果皮与手掌接触处,因此实际软体机械手进行柑橘夹持时对果皮产生的最大等效约为0.354 MPa;由图12(d)可知,在该气压下1 根软体手指对柑橘造成的最大变形为0.736 mm,实际操作中软体机械手对柑橘造成的最大变形约为2.208 mm,变形较小。综上,充气气压为0.035 MPa 时,软体机械手不会对柑橘果肉及果皮造成损伤。充气压强为0.07 MPa 时,得到的仿真结果如图13 所示。

图13 0.07 MPa 时软体手指夹持柑橘仿真结果图Fig.13 Simulation results of holding citrus with soft fingers at 0.07 MPa
经分析充气气压为0.07 MPa 时,软体机械手也不会对柑橘果肉及果皮造成损伤。因此充气压强在0.035 ~0.07 MPa 时,软体机械手同时满足刚度与不损伤柑橘的要求。
6 采摘试验分析
6.1 控制系统设计
本文搭建的控制系统试验平台如图14 所示。
控制系统主要由气源控制以及剪切控制两部分组成。气源控制部分由气泵、过滤器、换向阀、触发开关和继电器组成;剪切控制部分包括上位机、单片机、压力传感器、触发开关、步进电机控制器和步进电机。
6.2 软体机械手夹持损伤验证试验
由仿真可知,软体机械手在夹持柑橘时,柑橘最大变形应力发生在与手掌接触处。因此本文将压力传感器贴在软体机械手手掌上,通过检测不同压强下,以压力传感器上的压力是否超过前文压缩试验测得的破坏力为依据来检验柑橘是否损伤。
对软体机械手通入0.035 ~0.07 MPa 的气压,夹持柑橘重量为239.34 g,气压间隔为0.005 MPa,每组试验重复3 次取平均值,得到的不同气压下压力传感上的负载,其结果如表7 所示。

表7 不同气压下压力传感器输出的压力Table 7 Pressure sensor output at different air pressures
根据上表得出的结果可看出,软体机械手在最大压强下对柑橘的挤压力为18.13 N 远小于柑橘破坏力141.65 N。因此在充气压强为0.035~0.07 MPa下,软体机械手对柑橘夹持不会造成损伤。
6.3 软体机械手抓取适应性试验
为验证本文设计的软体机械手具备一定的通用性,能抓取形状大小不同的物体,试验选取了几种典型的球类果蔬进行试验如图15 所示,软体机械手能夹持不同种类和大小的果蔬,为验证软体机械手刚度具有适应性,采用自上而下的抓取模式进行果蔬抓取。其中,软体机械手夹持‘砂糖’橘为指尖抓取,充气压强为0.02 MPa 时软体机械手能稳定夹持且不损伤‘砂糖’橘。其余3 种果蔬抓取为包络抓取,充气压强为0.07 MPa,试验得到:软体机械手在最大气压下夹持苹果和梨子这种较硬的水果时不会出现损伤。夹持西红柿时,西红柿表面出现不破皮的凹痕。由进一步试验得出,软体机械手在充气压强为0.055 MPa 时能无损夹持西红柿。

图15 软体机械手抓取不同果蔬试验Fig.15 Experiments of grasping different fruits and vegetables by soft manipulator
6.4 采摘软体末端执行器采摘试验
本文采用台架试验,将制作的采摘软体末端执行器安装在DOBOT CR5 机械臂上,如图16 所示。

图16 DOBOT CR5 机械臂Fig.16 DOBOT CR5 robot arm
运用本文设计的控制系统对柑橘采摘软体末端执行器进行试验(如图17 所示)。

图17 采摘试验Fig.17 Picking experiment
试验选取带长枝丫的柑橘共30 个,软体机械手充气压强为0.07 MPa,压力传感器反馈值设定为6.43 N。通过试验得出:采摘软体末端执行器完成1 个柑橘采摘的时间平均约为3.54 s;软体机械手夹持柑橘成功率为96.67 %,夹持失败的原因是由于软体机械手在接近柑橘果实时,被果实附近的枝丫阻碍,导致手指偏离原定的夹持位置;在夹持成功的基础上,剪切机构成功剪切全部果梗。
7 结论
设计了1 款柑橘采摘软体末端执行器。对软体手指进行了力学建模、参数优化与仿真。为验证力学模型与有限元仿真可靠性,制作软体手指进行了弯曲试验;为保证软体机械手同时满足刚度要求且不损伤柑橘,进行软体机械手夹持柑橘有限元模型分析,得到充气压强在0.035 ~0.07 MPa 时软体机械手既满足刚度要求又不损伤柑橘;最后搭建试验平台,试验证明采摘软体末端执行器夹持柑橘成功率为96.67 %,平均无损采摘1 个柑橘需要耗时3.54 s。
