海上跨平台无人系统机动组网与智能控制技术
2024-02-21张婷婷邓志良刘云平宋爱国
张婷婷,邓志良,刘云平,王 聪,胡 凯,曾 洪,宋爱国
(1.中国人民解放军陆军工程大学 指挥控制工程学院,江苏 南京 210007;2.南京信息工程大学 信息与控制学院,江苏 南京 210044;3.中国人民解放军陆军工程大学 野战工程学院,江苏 南京 210007;4.东南大学 仪器科学与工程学院,江苏 南京 210037)
0 引言
随着海洋信息技术向着无线宽带化、网络化、多手段、大覆盖、立体化的方向迅速发展,海域已成为我国经济社会发展的重要战略空间[1]。由于无人系统等新一代信息技术与海洋科学的交叉融合渗透发展,集成海洋通信网络[2]成为众多学者的研究热点,并在海洋信息网络系统领域上得到了广泛应用。
海洋环境具有以下特点:① 海域辽阔,观测与探测任务繁重;② 海洋环境复杂多变[3],对观测设备和方法提出了较高要求;③ 传统的海洋观测方法在覆盖范围、实时性和观测效率方面存在局限。针对海洋信息大、分、散、变的特点,海洋信息对于人类认识海洋和经略海洋占据基础性地位[3]。
海上无人系统组网技术是指将多个无人系统(如无人船、无人潜航器等)通过通信技术连接在一起,形成一个协同作业的网络。在机动组网观测方面,自2019年在海上实施了大规模的无人系统组网观测后,我国突破了多无人机动设备协同导航以及多无人机动设备协同编队控制技术,完成了大规模、多类型无人机动设备组网海上试验[4]。在海面通信方面,由于海上无线通信面临许多挑战,如信号衰减、多径效应和海洋气象影响等。目前还未形成完整的海洋通信保障服务体系,主要依靠近岸移动通信网络、短波/超短波电台等技术进行[5]。因此,深入研究海上无线通信系统和选择合适的网络拓扑结构,是无人系统机动组网的关键技术和应用基础。
针对当前海洋探测系统实时性低、同步性弱、机动性差等特点,目标设计一个海气界面水文气象参数实时测量与传输快速机动组网观测系统,通过自适应组网技术和多智能体协同探测,实现海上自主接入快速组网和数据自动传输技术,执行对海上海-气界面现象过程的快速观测。
1 无人系统海洋自组网技术
无人系统海洋自组网技术[6]是指通过无人系统平台在海洋中建立自主、动态、协同的观测与控制网络。该技术可以实现海洋环境参数的智能、高效、全方位采集和分析,从而为海洋领域的科学研究和应用开发提供重要支撑。目前,随着无人系统技术的飞速发展,无人系统海洋自组网技术也得到了广泛应用和深入研究。
1.1 海洋观测网发展现状
海洋观测网是指基于现代信息技术手段,通过多种观测手段对海洋环境及其变化过程进行系统、全面、连续、实时监测和分析的综合性观测平台[7]。在过去的几十年中,随着我国经济社会的快速发展以及日益凸显的海洋利用需求和海洋环境保护意识,海洋观测网得到了快速发展。
目前,我国正在加快推进海洋观测网建设,形成了一批具有代表性的海洋观测网体系[8]。国内已有多个海洋观测网系统采用无人系统自组网技术,如东海海洋观测网和北极海洋环境综合观测系统等。这些网站利用各类无人系统节点(如航行器、滑翔机和水下机器人等)构建无人系统网络。这些无人系统节点之间通过通信协议进行数据传输和信息共享。同时,我国还在不断拓展海洋观测网的应用领域,如利用遥感技术进行海洋生态环境监测和资源调查、利用海底观测系统进行海洋地质环境研究等。
国外方面,海洋观测网也得到了广泛研究和应用,如图1所示。其中,美国国家海洋和大气管理局(NOAA)建立了全球海洋观测网[9],该网通过卫星、浮标和船只等多种观测设备,实现了对全球海洋环境的实时监测和预警。爱尔兰海研究所(Marine Institute)和爱尔兰海洋能源开发公司(SEAI)联合建立了爱尔兰海区域观测网(ISCO)[10],旨在提供全球最先进的海洋观测服务。此外,欧洲联合研究中心(JRC)也建立了欧洲海洋观测网(EMSO)[11],通过多种观测设备,实现了对欧洲海洋环境的实时监测和数据共享。

图1 国际海洋观测网示例Fig.1 Examples of international ocean observation network
无人系统自组网技术是海洋观测网建设中的重要技术手段,国内外在观测节点相互通信、机动布网和协同观测等方面的相关研究均处于起步与探索阶段。
1.2 无人系统机动组网关键技术
多智能体机动组网及智能控制平台主要在海上、地下等复杂环境中执行保障通信、协同观测与应急处置任务,其中存在三大技术难题:① 大范围稳定快速机动组网通信;② 通信受限下移动追踪协同决策有效性;③ 复杂环境中通信和控制精度。为解决难题,本文提出以下3点关键性技术。
(1)面向多点协同追踪观测任务的无人系统自适应组网技术
针对无固定通信基础设施下大范围、低成本、高可靠通信的难题,提出面向多点协同追踪观测任务的无人系统自适应组网技术,无人平台机动组网架构如图2所示。

图2 无人平台机动组网架构Fig.2 Unmanned platform mobile networking architecture
该技术的核心思想是通过自组织和自适应的方式将各个无人系统节点形成一个网络,使得节点之间可以互相通信、协作,并按照任务需求和环境变化进行动态优化和调整,以实现最佳的观测和追踪效果。具体来说,该技术包括节点选择、节点位置及速度控制、通信协议和决策算法等多个方面的内容。当任务需求发生变化或者环境条件发生变化时,可以自动识别变化并做出相应调整,保证系统的鲁棒性和稳定性。
(2)自组网通信协议和算法
针对实现异构无人平台快速入网和无缝通信的技术难题,设计了自组网通信协议和算法,并采用如图3所示的mesh组网[12]形式,使得不同的观测设备之间能够完成高效、稳定和可靠的通信,其组网协议层如图4所示。
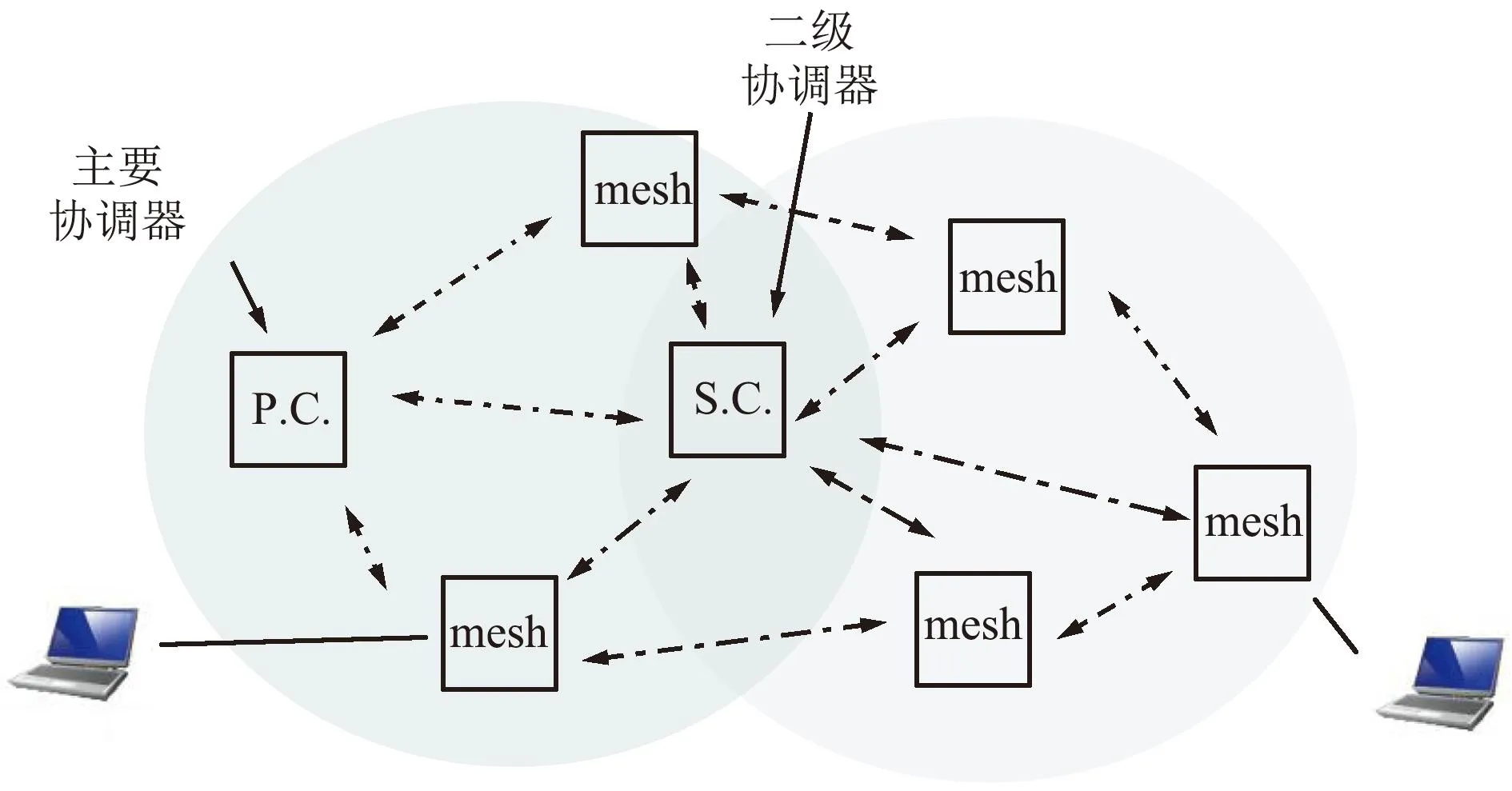
图3 Mesh组网Fig.3 Mesh networking

图4 组网协议层Fig.4 Networking protocol layer
船舶自动识别系统(AIS)通信协议[13]是一种应用广泛的海上自组网通信协议,采用一种广播式的传输方式,能够提供很好的覆盖范围和通信效率;树形分层拓扑结构是指将各个观测设备按照层次结构组织起来,便于管理和控制,同时保证了通信链路的稳定性和可靠性[14];任务的多种簇首算法是指为实现最优的资源利用和任务分配,采用多种优化算法对任务进行调度和分配[15]。
(3)异构无人系统间通信技术
海洋环境中存在大量的水下障碍物、多路径传播和信道衰落等问题,传统无线通信技术往往受到很大限制。透传技术通过合理选择频率、调制方式和传输功率,能够有效避免这些问题,提供更加稳定和可靠的通信性能。
透传技术是一种通过水下、地下或空中等媒介传递信息的无线通信技术,它克服了传统无线通信技术在海洋环境中的局限性,通过将数据信号转化为特定的载波频带,利用水中或空中的传播介质进行传输和接收。为海洋自组网中的异构无人系统提供了可靠的通信手段,实现了跨平台无人系统之间的数据共享、任务分配和协同运动,提高了整个系统的控制精度和效率透传技术具有较长的传输距离和高信道传输,海洋自组网中的无人船和无人机往往需要在较长距离上进行通信,传统的直接通信方式难以满足需求。可以通过在透传中适当调整传输参数,实现更远距离的通信,从而实现多节点的协同通信,形成自适应网络,使得各个节点之间实现信息共享、协同决策和资源优化。这种分布式的通信方式为海洋自组网的系统整合和控制提供了坚实的基础。
2 无人系统智能控制理论
2.1 基于触发机制的多智能体系统的一致性问题
当智能体之间通信时,经常有通信时滞的产生,且每2个智能体之间的通信时滞不一样。对于时滞研究的方法,有些学者是把时滞区间分成若干份相等的区间,利用Lyapunov函数方法和积分不等式的技巧,得到使系统稳定的充分条件。本文利用多项式(SOS)的方法研究时滞问题,把SOS的方法应用到多智能体系统的包含控制问题中。
通过设计控制输入,使得跟随者的状态进入到多个领导者的状态形成的凸包里面(称为包含控制),也称为带有多个领导者的一致性问题。为了节省能量的消耗,采取了基于触发机制的一致性控制。引入用SOS的方法对差分耦合方程的控制器的研究,把上述结果应用到多个领导者的一致性问题(即包含控制)。
考虑二阶领导者的动态如下:
(1)
二阶跟随者的动态如下:
(2)
式中:xi(t)为第i个智能体的状态,ui(t)为控制输入。
设计的一致性算法如下:
式中:tk为触发时间,τ为时滞。
本文主要利用多项式逼近的方法,得到二阶多智能体系统保守性更小的时滞上界。
2.2 带有输出饱和的多智能体系统的一致性问题
饱和是实际的控制系统中最为普遍的现象之一,大多数执行器不可避免地会出现饱和。如果执行器的输入量达到一定限制,就进入了饱和状态,因为进一步增加输入不能对执行器的输出产生任何影响[16]。
高阶多智能体系统的动态方程如下:
(4)
智能体之间的通信协议如下:
(5)
为验证提出算法的有效性,利用非线性系统、图论等方法进行数值仿真,验证多智能体系统能够达到一致,仿真结果如图5和图6所示。

图5 多智能体位置运动轨迹数值仿真Fig.5 Numerical simulation of multi-agent position motion trajectory

图6 多智能体速度运动轨迹数值仿真Fig.6 Numerical simulation of multi-agent velocity motion trajectory
本文证明了在提出的一致性算法下,多智能体系统的状态在有限的时间内能够解决包含控制问题。
2.3 异质多智能系统的输出一致性问题
在现实的复杂网络中,每个智能体的动态是不一样的,这类系统被称为异质多智能体系统。
(1)无领导者的异质多智能体系统输出一致性问题
异质多智能体系统的动态方程与输出一致性定义如下:
当智能体的状态不能直接测量得到时,提出了基于观测器的一致性算法:
(8)
包含上述参数的输出调节方程定义如下:
(9)
在上述提出的一致性通信协议和输出调节方程下,多智能体系统能够达到输出一致性。
(2)有领导者的异质多智能体系统输出一致性问题
领导者的动态方程如下:
(10)
当智能体的状态不能直接测量得到时,基于观测器的输出调节算法如下:
(11)
在上述提出的一致性算法下,利用稳定性理论、图论等方法,验证异质多智能体系统能够达到一致。仿真算例中的智能体通信拓扑结构与每个智能体的位置轨迹如图7和图8所示。

图7 智能体的通信拓扑结构Fig.7 Communication topology of the agent

图8 智能体集群的位置轨迹Fig.8 Position trajectory of agent cluster
3 海上无人系统集群智能控制技术
3.1 无人机间通信系统架构
无人机集群系统[17]在单架无人机系统的基础上增加了LTE通信模块,引入了正交频分复用(OFDM)和多输入多输出(MIMO)等关键传输技术,显著增加了频谱效率和数据传输速率,并支持多种带宽分配,频谱分配更加灵活,系统容量和覆盖也显著提升。无人机群编队通信系统框图如图9所示。

图9 无人机群编队通信系统框图Fig.9 Block diagram of UAV cluster formation communication system
3.2 无人机集群快速编队
设计基于给定有限时间分布式观测器为跟随无人机观测领航者的轨迹信息[18];针对环境感知情况,建立无人机集群感知决策机制。然后,根据决策结果对无人机集群编队进行切换。

(12)

然后,基于式(12)所获取的领航者无人机位置信息,设计每个跟随者无人机的控制器输入设计如下:
(13)

引入无人机之间角度偏差信息,可以实现各种复杂编队队形。通过将环境感知结果进行分类处理,建立不同编队对感知结果的对应关系。在无人机群集编队飞行过程中,根据感知结果进行编队切换,其中切换信号由领航者根据通信网络拓扑关系发送给邻近无人机,无人机依次传输发送切换信号,接收到切换信号的无人机根据切换信号信息进行相应的编队模式切换。
4 海上探测示范应用
海上地区拥有丰富的海洋资源和生物多样性,海洋观测是国家战略急需,基础设施安全探测是国家稳定的基石,迫切需要发展信息化、智能化、无人化观测技术[19]。通过应用无人系统机动组网与智能控制技术,提高海上探测的效率和准确性,对于科学研究和资源开发具有重要的意义。
4.1 无人系统机动组网实施
无人系统在海上观测中具有自主性、灵活性、高效性等特点,既能够适应海上海域复杂的海洋环境,又满足达到快速机动的要求[20]。因此,提出了一种无人系统机动组网实施方案,通过多智能快速组网算法,实现对海上海气界面现象过程的快速观测。
观测示范关注海区西起西沙群岛,东至东沙海域,南至15°N,北至北部陆坡区。研究使用多台观测设备进行联合观测,包括浮标装载抛投装置、气象站、波浪传感器、ADCP和漂流浮标等。
观测区域北部是一个复杂的海洋环境,涉及多种中尺度过程,包括涡旋、边界流等。这些中尺度过程具有统计特征,如图10所示。可以通过对大量观测数据的分析和处理,进行有效的统计描述和数值模拟,海上探测应用中的观测参数主要包括海面风、温、湿、压、海流与波浪等。
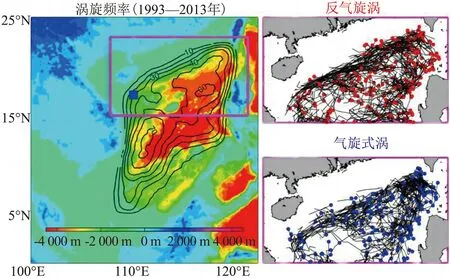
图10 海上北部中尺度过程统计特征Fig.10 Statistical characteristics of mesoscale processes in the northern of the sea
4.1.1 海气界面快速机动组网观测网络架构
海气界面快速机动组网观测网络示意如图11所示,该观测网络包括多台观测设备,如暖流浮标、抛弃式探空仪和无人机(艇)等,通过多智能快速组网算法进行联合观测。在观测任务开始前,需要根据具体的观测需求和海洋环境条件,确定合适的观测设备和路线,并进行目标分配和资源调度。

图11 海气界面快速机动组网观测网络示意Fig.11 Ocean-atmosphere interface fast mobile networking observation network
各个观测设备分别完成观测任务并采集数据,通过数据传输和处理,最终生成全局的海气界面资料。其中,海上浮标可以对海洋暖涡、表层流场等进行连续观测;船载测量设备可以对海水温度、盐度和流速等参数进行高时空分辨率的采集;无人机则可以提供高空间分辨率的影像数据,帮助研究人员更好地了解海气界面的形态和变化。
与传统的观测方法不同,海气界面快速机动组网观测网络具有机动性和灵活性,可以根据实时的环境变化,调整采集路线和观测设备,尽可能提高观测效率和准确性,从而实现对海气界面快速、全面的观测和预测。该观测网络的成功应用为海洋环境研究和保护提供了有力的技术支持。
4.1.2 无人系统机动组网通信实现
在海气界面快速机动组网观测网络中,通信组网是实现各个观测设备之间数据传输和信息交换的关键技术之一,远距离通信组网中各设备间的数据链路如图12所示。为了实现海上自主接入快速组网和数据自动传输技术,提出一种基于任务协同观测的多智能体快速组网算法,对无人系统海洋自组网技术的实现主要包括任务层、数据层、组网层、传输层以及感知层的技术研究。

图12 远距离通信组网Fig.12 Long-distance communication network
通信组网的研究方案主要包括:
① 通信技术选择:针对不同的观测设备和应用需求,需要选择合适的通信技术。例如海上浮标可以采用卫星通信或VHF无线电通信,船载测量设备可以采用激光通信或蓝牙通信,无人机则可以采用4G或5G通信等。
② 通信协议制定:采用基于AIS通信协议、树形分层拓扑结构和任务的多种簇首算法,完成数据链路的传输,实现各个观测设备之间的互联互通。
③ 网络拓扑结构设计:针对特定的观测任务和环境条件,设计mesh网络拓扑结构,以实现快速组网和数据传输。
④ 数据传输和处理:采用大数据组件的Lambda架构对数据交互、分析与存储,实现数据层的数据管理[21]。
基于任务协同观测的多智能体快速组网方案如图13所示。
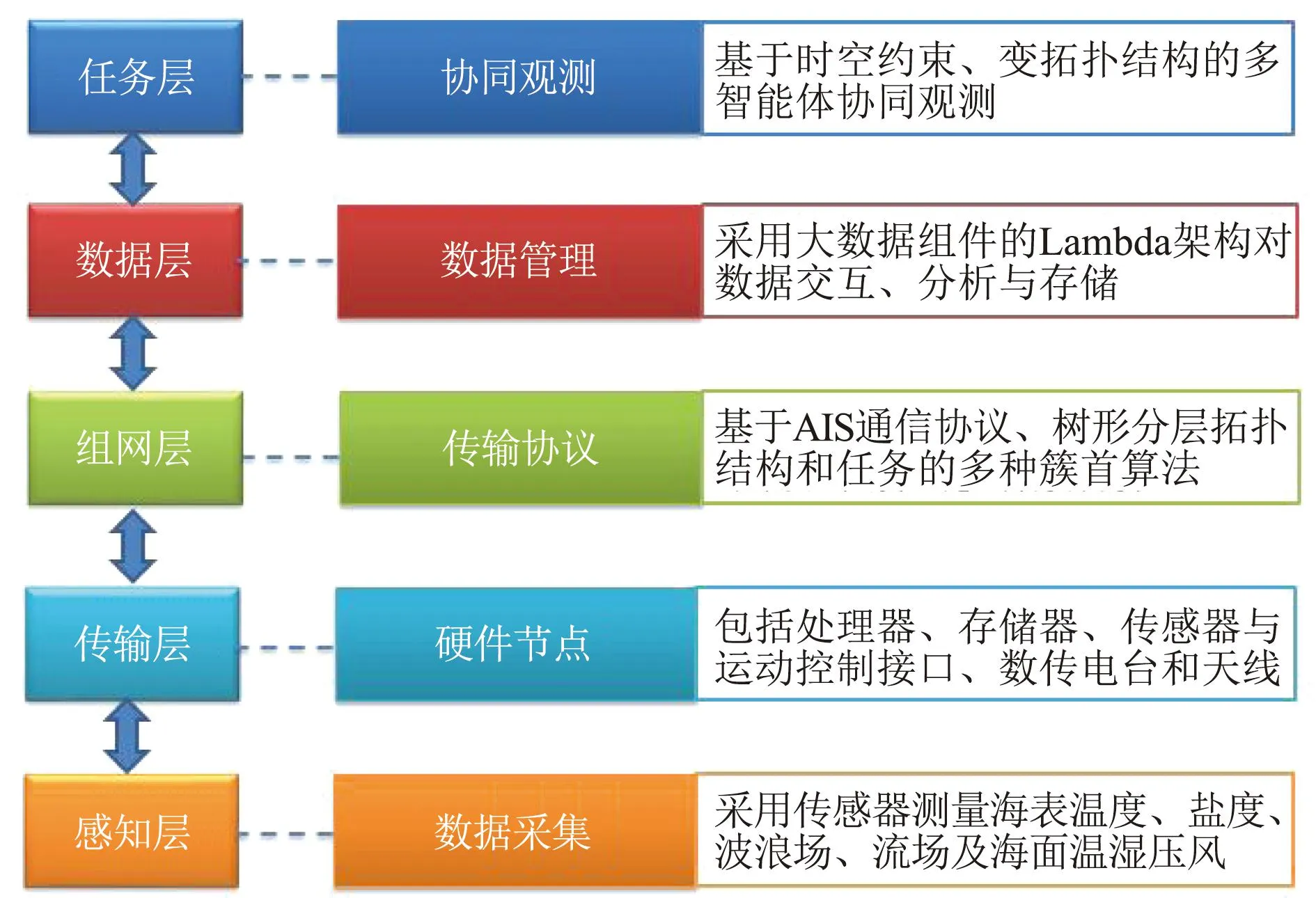
图13 基于任务协同观测的多智能体快速组网方案Fig.13 Fast multi-agent networking scheme based on task collaborative observation
通信组网可以帮助各个观测设备进行联合观测和数据共享,从而加强设备之间的协作和提高数据传输效率,提高整个观测网络的效率和准确性,为海洋观测和监测系统的开发和应用提供重要的技术支持。
4.2 应用与测试
4.2.1 开发新一代异构多智能体快速机动协同组网海气界面观测系统
自主开发了多智能体协同控制平台,包括无人机、无人艇和波浪滑翔器等,实现了平台间的多模通信组网数据接口、控制单元和数据传输处理硬件及软件的协同操作。使得不同智能体平台之间可以自主地进行协同组网,并且能够自动变换拓扑结构,实现海上独立快速移动智能体多模异构自主组网,创造了新的海气界面观测模式。在上海金山近海实验基地对异构多智能体快速机动组网观测系统进行了全面测试和验证,其各项性能和指标均达到了海上极端环境下的使用要求。
多智能体机动协同组网观测系统测试如图14所示。

图14 多智能体机动协同组网观测系统测试Fig.15 Multi-agent mobile collaborative networking observation system test
新一代异构多智能体快速机动协同组网海气界面观测系统已经在多个实际场景下得到了应用测试,包括海洋和大气环境的监测、海洋生态系统的研究、气象和海洋灾害预警等方面。
该系统通过多种传感器收集海温、海流和压力等数据,实现了对海洋环境变化的实时监测和分析,在海洋环境监测、气象灾害预警和海上交通中有广泛的应用,提供了更准确的数据支持。在海洋、气象、环境等多个领域都有着巨大的潜力和应用价值。
4.2.2 组网观测应用示范现场——多智能体暖涡观测
暖涡是指在海面上形成的水温比周围海域高的区域,通常由暖流或洋流带来的海水运动或者由气流和地形导致的地形汇聚所形成。暖涡对海洋环境、海洋生态系统和海洋物理过程有着重要的影响,因此进行暖涡观测对于研究海洋环境变化具有重要意义。
多智能体暖涡观测是利用多个智能体平台(如无人机、无人艇和波浪滑翔器等)协同作业,对目标区域的暖涡进行高效、全面的观测。如图15所示,这些智能体平台配备了温度传感器、水流速度与方向传感器等多种观测设备,可以同时对多个参数进行实时监测记录,并将数据传输到组网中心站点进行处理和分析。

图15 多智能体暖涡观测应用情况Fig.15 Application of multi-agent warm eddy observation
实验结果表明,该系统能够实现快速响应、自适应控制和高效协作。利用提出的多智能体协同编队控制策略,实现了设备之间的协同与协作以及海洋数据的高效采集和处理,其在复杂极端环境下无人系统智能探测平台主要技术参数对比如表1所示。

表1 复杂极端环境下无人系统智能探测平台主要技术参数对比Tab.1 Comparison of main technical parameters of unmanned system intelligent detection platform in complex extreme environment
无人系统智能探测平台采用混合式传感融合物体识别、自适应通信组网等多种先进技术,还应用于港珠澳大桥海底隧道健康监测系统等场景,并取得了显著的成果,展现出重要的实际应用价值。
5 结束语
本文重点介绍了在海上探测示范应用中实现的无人系统机动组网与智能控制技术,以及其在海洋环境复杂多变的情况下所面临的挑战和应对方案。这些技术的成功应用,不仅推进了海洋科学的前沿研究,也为我国在海上资源开发和保护、海上安全等方面提供了强有力的支持。未来将继续深化相关技术的研究和应用,以更好地服务国家海洋事业的需求和社会发展。
