煤矿架空乘人装置PLC电气自动控制系统功能分析与设计
2024-02-13高希睿
*高希睿
(山西汾西宜兴煤业有限责任公司 山西 032300)
随着煤矿智能化建设的不断发展,架空乘人装置的高效集中控制逐渐成为了煤矿建设的重要方向,在基于PLC的架空乘人装置控制系统中,主要包括启停车模块、系统控制模块,本文从这两个模块出发,对基于PLC的架空乘人装置自动控制系统进行具体设计。
1.基于PLC的架空乘人装置概要设计
架空乘人装置的功能为:在矿井辅助运输中,将工作人员运输到指定位置,其使用环境如表1所示。
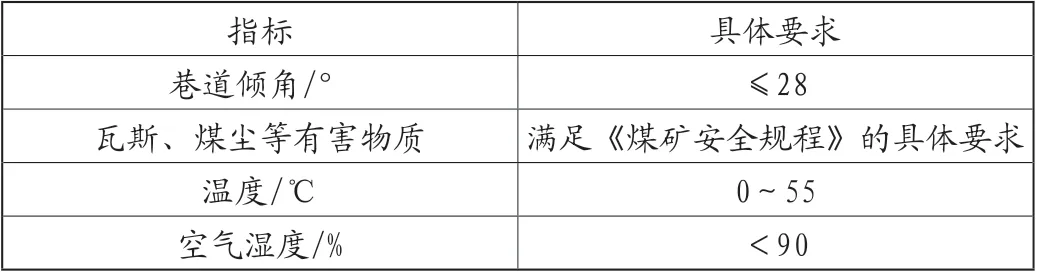
表1 煤矿架空乘人装置使用环境
煤矿架空乘人装置自动控制系统结构框架包括工控机、矿井环网、光电转换模块、以太网模块、二部电控柜、三部电控柜。煤矿架空乘人装置自动控制系统需要实现无人值守、智能化运行,因此需要结合PLC技术来实现对各个装置的管理与控制,PLC、红外感应装置共同完成人体信号捕捉,并调整装置状态,基于PLC的架空乘人装置系统控制流程,如图1所示。

图1 基于PLC的架空乘人装置系统控制流程图
同时,由于我矿主斜井架空乘人装置与主斜井皮带同巷布置,根据《山西省应急管理厅国家矿山安全监察局山西局关于中煤集团山西华润联盛黄家沟煤业有限公司“6·15”较大运输事故的通报》要求:在同一倾斜巷道中架空乘人装置与带式输送机、轨道提升系统同巷布置时,必须设置电气闭锁,两种设备不得同时运行。
2.基于PLC的架空乘人装置启停车程序设计
(1)手动、自动模式程序设计
基于PLC的架空乘人装置启停车程序应当具有手动、自动两个控制模式,其具体工作流程如下:①自动模式。系统默认为自动模式,在手动模式时,也可以通过按下“自动模式”按键直接切换到自动模式。此时,启动信号从乘车点红外传感器发出,红外传感器识别感应区内部的人员通行情况,如果识别到人员存在,则应当将信号传输到PLC主控器,根据自动模式下的程序设计进行架空人员运输作业。同时,在自动模式下,操作人员应当无法进行手动按钮操作,否则就很容易造成命令冲突。②手动模式。技术人员可以按下“手动模式”按键直接切换到手动模式。此时,技术人员可以通过观察,在合适的情况下按下操作台上的启停按钮,对架空乘人装置进行有效控制[1]。
(2)白天、黑夜模式程序设计
在当前的煤矿生产过程中,煤矿节能降耗、提升架空乘人装置使用率是非常重要的,基于PLC的架空乘人装置启停车程序应当具有白天、夜间两个控制模式,其具体工作流程如下:①白天模式。即正常工作时间段,主要指的是7点—24点这一时间段,此时,整个系统正常运行,当延时时间到达预定时间,同时人体红外线感应器检测到无人时,整个系统会自动进行调整,进行变频器多段速控制,将架空乘人装置的高速运行转换为低速运行状态。②夜间模式。即节能工作时间段,指的是0点—7点这一时间段,此时,整个系统处于夜间模式,红外传感器正常工作,当检测到有人员经过时,红外传感器会将信号传输到PLC主控器端口,主控器启动,进行人员运输。当延时时间到达预定时间,同时人体红外线感应器检测到无人时,整个系统会自动进行调整,与白天模式不同,会直接将架空乘人装置的高速运行转换为停止运行状态,能够在一定程度上节省能耗。
3.基于PLC的架空乘人装置保护程序设计
系统保护程序也是非常重要的,在煤矿架空乘人装置正常运行的过程中,经常会由于各种原因出现诸多机械故障,主要表现为越位、断轴、油温异常、泵站开关故障、架空乘人装置速度异常等。因此,制定相应的智能保护程序也是非常重要的,本文充分结合实际情况,对速度、液压站两个重要点位的安全保护程序进行分析与设计。
(1)速度检测与保护程序设计
在正常情况下,架空乘人装置的运行速度基本会按照预定速度执行,过快或者过慢基本都预示着系统自身存在一定问题,同时,速度大小还会对整个系统的安全性、效率造成比较明显的影响,因此,对其运行速度进行监测具有一定现实意义。速度检测主要通过编码器设备来实现,该设备主要固定在架空乘人装置驱动轮处、离驱动轮最近的托绳轮前,该装置会将采集到的速度信号转化为高速脉冲传递到PLC主控器上,当运行速度变化明显时,该智能控制器应当能够发出警报并停止装置运行。
编码器、高速计数器两者相互结合能够实现对速度的精准测量,并通过编码器向PLC主控器发送脉冲。其具体内容为:①编码器的原理与结构。编码器的原理为,其单圈转动后单位脉冲是给定的,在实际运行过程中,能够比较准确的测量编码器转一周的周长,因此,PLC只要记录编码器反馈的脉冲式,通过计算即可确定速度的具体数值。常见的编码器类型主要包括增量式编码器与绝对式编码器,本次研究选择旋转增量式编码器,其基本结构包括放大电路、码盘,放大电路包括发光管、接收管,能够实现对信号的放大处理,码盘包括A、B、Z三相脉冲。②高速计数器。本文研究所采用的计数器为精度较高、范围较大的高速计数器,S7-1200 Smart PLC提供有四个高速计数器,HSC0-HSC3。S7-1200 Smart高速计数器存在八种工作模式,主要包括具有内部地址控制的单相时钟计数器、具有外部地址控制的单相时钟计数器、具有正负时钟脉冲输入的双向时钟计数器、A/B正交计数器,以上四种类型每种都存在两个具体的工作模式。高速技术器的编写步骤为设置高速计数器的控制字节、写入初始值与预设值、使用HDEF指令定义高速计数器的编号与模式、链接相应中断并允许全局开中断、启动高速计数器、编写相应的中断程序。表2为高速计数器初始值与预设值。
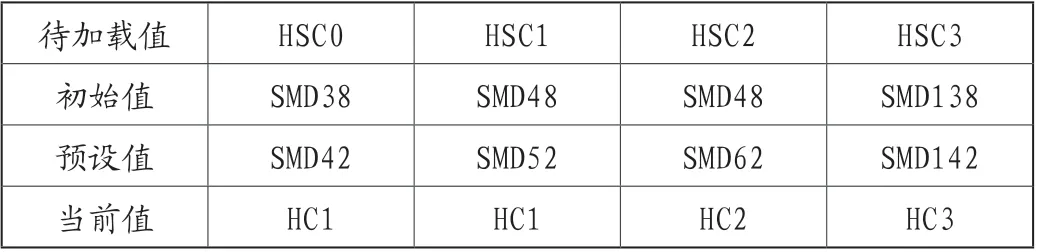
表2 高速计数器初始值与预设值
速度检测的具体程序设计思路如下:①调用“速度”子程序,设置控制字节“16#FC”,调用高速计数器,对当前值、预设值进行更新;②写入初始值;③调用0号高速计数器并启动,以3s为周期进行速度测量,并将脉冲数装入VD104寄存地址中,将转换后的转数装入VD104寄存地址中,将计算后的电机转数装入VD108寄存地址中,最后计算得出每秒电机速度。
(2)液压站油温、油位检测程序设计
液压站油温、油位检测需要经过计算才能实现,其具体逻辑公式内容为:OV=[(OSH-OSL)×(IV-ISL)/(ISH-ISL)]+OSL,其中,OV表示转换结果;OSH表示转换结果上限;OSL表示转换结果下限;IV表示转换对象;ISL表示转换对象下限;ISH表示转换对象上限。S7-1200智能编程软件能够提供相应的库指令,通过调用、写入能够实现高质量的信号采集作业。
油温、油位检测程序设计思路如下:①将OSH、OSL分别设置为150/0,ISH、ISL分别设置为27648/0,此时就可得到实际温度数值;②将温度实际值、预设值进行比较,区分其大小,当温度实际值>温度预设值时,应当进行报警处理。
4.基于PLC的架空乘人装置通信组态的分析与设计
(1)通信设计
基于PLC的架空乘人装置通信组态也是保证系统正常运行的重要结构之一,本文决定采用估计与PLC的Modbus串口通信,该方法具有传播形式的多样性,常见类型包括光纤传播、以太网通讯等,在本文所采用的西门子S7-1200 SMART PLC中,包括两种串行通讯接口,分别用于RS485、RS232两个标准。
西门子S7-1200 SMART PLC系统硬件包括一个CM 1243-5PROFIBUS DP主站模块、一个CPU 1214DC/DC/DC模块、一个SM1233数字量输入/直流输出模块、一个SM1231模拟量输入模块、三个ET200S分布式I/O分站、一个4DO×24VDC/0.5AST、一个TM-C120S终端模块。
RS485接口具体情况如下:①接线方式。RS485接口的3号、8号脚分别代表信号“+”“-”,一个主站可以对应多个从站,可以采取一对多的接线方法。②工作方式。在一般情况下,RS485主要为差分工作方式,即逻辑信号电平由双绞线两者的差表示。
RS232接口具体情况如下:接线方式。RS232需要两根数据信号线与一根信号地线完成连接,采用负逻辑,仅支持两个设备之间的点对点通信。
(2)通信协议
通信协议即数据之间的交换规则,主要包括站号、命令代码、数据、校验码。本文研究的通信协议为Modbus RTU通信协议,Modbus属于典型的单主站、无地址的主从通信模式。Modbus RTU信息帧格式包括起始、地址、函数、数据区域、控制五个基本元素,无明确的开始、结束字符,其具体元素信息为:①起始符。通常以3.5个字符长度的时间来代替。②地址码。表示设备在Modbus中的地址。③功能码。其功能为向从站指示执行某种具体操作,如读取数字量输出状态等。此外,Modbus RTU包含四种能量类型,其具体内容如表3所示。
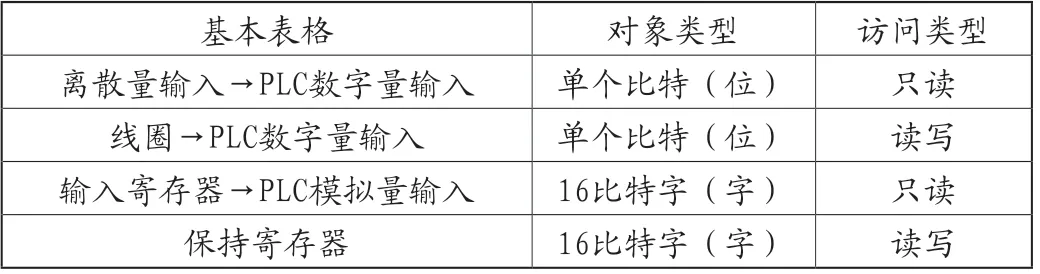
表3 Modbus RTU四种能量类型
在数据单元协议中,数据类型并无明确差异,都有着具体数据地址,需要t通过执行地址映射来确定数据类型,Modbus数据模型的寻址方式主要包括四种基本类型,即0xxxxx、1xxxxx、3xxxxx、4xxxxx,分别表示线圈、离散量输入、输入寄存器、保持寄存器,地址从1开始。在实际存储过程中,已经定义存储区域之后,还需要在Modbus中进行二次地址映射,根据自身需要进行自定义即可。例如,Modbus地址为00001-00128时,对应的S7-1200 SMART 数据区则为Q0.0-Q15.7。
PLC与磁力启动开关的通讯程序设计思路如下:①磁力启动开关协议与规定。当通讯地址不为0时,液压站磁力启动开关通讯方式选择采用Modbus RTU通信协议,标准协议规范包括故障查询区、测量值显示为只读区域、系统参数区、通讯控制区。②PLC的通信程序设计。首先,置位相关点位,启用主站初始化指令,读取数据装入字节,最后将存储区数据传送到HMI触摸屏进行显示与控制。
5.结论
综上所述,结合可编程控制器技术及煤矿架空乘人装置的实际需求,从启停车模块、系统保护模块两方面进行了具体软件与程序设计,相关单位在进行架空乘人装置设计时,可以适当参考本文的研究内容,相信能够在一定程度上提升自身软件设计水平,进而满足编程控制需要。