基于数据与模型联合驱动的波阻抗反演方法
2024-02-04桑文镜袁三一丁智强于越刘浩杰韩智颖
桑文镜,袁三一*,丁智强,于越,刘浩杰,韩智颖
1 中国石油大学(北京)地球物理学院,北京 102249 2 中国石化集团公司胜利油田物探研究院,东营 257000
0 引言
作为直接联系地震反射特征与储层参数特性的重要桥梁,波阻抗(AI)是反映地层弹性和岩性等性质的重要参数之一.波阻抗反演有机结合地震和测井等多元地球物理信息预测波阻抗参数,已经发展成为应用最为广泛和最为成熟的地震反演方法.准确预测波阻抗对岩性精细解释、储层参数预测、含油气性识别和井眼轨迹设计等油气勘探与开发工作具有重要意义(Connolly,1999;Latimer et al.,2000;van Riel,2000;Grana and Rossa,2010;王峣钧等,2021).目前,传统基于模型驱动的优化方法和近年来兴起的基于数据驱动的智能方法是波阻抗反演的两大类方法.
基于模型驱动的优化方法(简称模型驱动方法)使用明确的先验信息(如稀疏性和光滑性),建立表征地震波场传播规律与弹性性质之间物理关系的数学模型,通过求解最优化问题从地震数据预测出波阻抗.根据不同的介质模型假设,模型驱动方法可分为基于波动方程的反演和基于褶积模型的反演两类(张宏兵等,2005).后者实现相对容易,其进一步分为确定性反演和统计性反演两类(Grana and Rossa,2010;周单等,2022;张栋等,2023).按照地震和测井数据在反演中的参与程度,确定性反演大致经历了地震直接反演、测井控制下的地震反演和井震联合反演三大发展阶段.每个阶段的代表性方法依次有递推反演(Lindseth,1979)、稀疏脉冲反演(Debeye and van Riel,1990)和基于模型的反演(Yuan et al.,2015,2019)等.递推反演和稀疏脉冲反演通过预先求取反射系数间接预测波阻抗,其预测精度同时受限于地震数据品质和反褶积方法.基于模型的反演依赖于精确的初始模型(Francis,1997).传统基于层序地层格架约束的井插值初始模型不适用于地质构造复杂和地质体横向变化剧烈的工区.此外,井插值初始模型的可靠性也会随着其频带范围的增加而下降(Cerney and Bartel,2007).因此,如何提高初始模型与实际地质情况的吻合程度是保证基于模型的反演的准确性的关键所在.
基于数据驱动的智能方法(简称数据驱动方法)不再依靠严格的数学或物理假设,其综合多元地球物理数据模拟地震反演及正演过程,通过灵活使用一种或混搭多种机器学习算法,建立地震等数据到波阻抗的高维非线性关系.构建的智能模型在目标函数的迭代优化过程中,挖掘井震等数据之间的统计性规律,实现波阻抗的智能预测.目前,数据驱动方法采用的主流网络架构包括卷积神经网络、循环神经网络、生成对抗网络和时空卷积神经网络等(Alfarraj and AlRegib,2019;Mustafa et al.,2021;Smith et al.,2022;Wang Y Q et al.,2022;Wang Z X et al.,2022;Yuan et al.,2022;王竟仪等,2023;Meng et al.,2024).不同类型的神经网络采用以有监督学习、无监督学习和半监督学习为主的学习模式进行网络训练(Chen et al.,2022;Di and Abubakar,2022;Yan et al.,2022),并考虑使用贝叶斯近似量化分析波阻抗预测的不确定性(Di et al.,2022;Junhwan et al.,2022;Ma et al.,2022).除使用模型微调(Wang et al.,2021;Liu et al.,2023)和域自适应(Wang Q et al.,2022;Yoo et al.,2022)等迁移学习策略外,数据驱动方法通过引入地质和地球物理等领域知识进一步提高了其在实际波阻抗反演场景的适用性.例如,Das等(2019)和Ge等(2022)使用地质统计学模拟为数据驱动方法生成充足的训练样本.相对地质时间和岩相特征等地球物理知识以额外输入特征和目标函数的正则化项等形式嵌入到神经网络的训练过程(Di et al.,2022;Zeng et al.,2023),进一步提升了数据驱动方法的准确性、稳定性和地质合理性.现有研究也经常使用模型驱动方法中的低频模型改进数据驱动方法的预测效果(Wu et al.,2021;Zhang et al.,2021;Bi et al.,2022;Sun and Liu,2022;Yan et al.,2022).然而,目前引入数据驱动方法改进模型驱动方法的研究相对较少.Gao等(2022)介绍了一种卷积神经网络与全局优化算法联合的波阻抗反演方法.该方法首先基于卷积神经网络高效求解相对精确的波阻抗模型,指导多组变异差分进化算法的变异方向.之后进一步使用全局优化精细预测的二维波阻抗微调卷积神经网络,使其快速实现三维地震数据的波阻抗反演.
Yuan等(2022)研究表明数据驱动方法擅长恢复波阻抗的低频分量.该方法精确预测的低频分量可以替代井插值初始模型,提高模型驱动方法的波阻抗建模质量.由此,本文提出一种基于数据与模型联合驱动的波阻抗反演方法(简称数据与模型联合驱动方法).该方法引入基于循环神经网络的数据驱动方法到基于模型的反演这种模型驱动方法,以改善后者的波阻抗反演效果.具体地,该方法首先利用循环神经网络学习地震数据和井插值初始模型与波阻抗之间的复杂非线性关系,预测相对精确的波阻抗模型.之后引入循环神经网络预测的波阻抗的低频分量作为基于模型的反演的初始模型,以此加速基于模型的反演的收敛速度并改善反演质量.通过合成数据和实际数据测试说明了本文方法的有效性,可以获得比模型驱动方法和数据驱动方法分辨率更高和准确性更好的波阻抗模型.
1 方法原理
本节主要介绍基于模型驱动、基于数据驱动和基于数据与模型联合驱动三种波阻抗反演方法的基本原理.并介绍本文提出的数据与模型联合驱动方法与前两种方法之间的关联与区别.最后介绍本文评价波阻抗预测结果的两种指标.
1.1 基于模型驱动的波阻抗反演方法
基于褶积模型,二维地震数据可以表示为反射系数与子波矩阵在时间域的褶积:
S=WR+N,
(1)
其中,S=[s1,s2,…,sM]为由M道地震记录(sj,j=1,2,…,M)组成的观测地震数据;W为子波矩阵;R为反射系数;N为随机噪声.子波矩阵W与长度为L的地震子波w=[w1,w2,…,wL]T的关系可以表示为
(2)
在水平层状介质假设下,若任意第j道的第i个采样点位置的反射系数Ri,j满足|Ri,j|≤0.3(Oldenburg et al.,1983),则Ri,j与其邻近位置的波阻抗Zi,j和Zi+1,j满足:
(3)
其中,Zi,j和InZi,j分别为第j道的第i个采样点位置的波阻抗和波阻抗的自然对数(即对数波阻抗).将式(3)代入式(1)可得波阻抗与地震数据的关系为
S=WDlnZ+N,
(4)
其中,Z=[z1,z2,…,zM]为由M道波阻抗曲线(zj,j=1,2,…,M)组成的波阻抗模型;lnZ为对数波阻抗模型.D为差分矩阵,具体表达为
(5)
根据波阻抗与地震数据的关系(式(4)),在随机噪声N服从高斯分布的假设下,基于模型的反演求解波阻抗的目标函数Lmodel一般为
(6)
(7)

(8)

图1 基于数据与模型联合驱动的波阻抗反演方法流程
1.2 基于数据驱动的波阻抗反演方法
基于数据驱动的波阻抗反演方法通过以深度神经网络为建模工具,在地震和测井等数据的驱动下建立适应当前地球物理数据特征的波阻抗智能表征模型.考虑到某一深度或时刻的地球物理响应是其周围地层岩石性质的综合反映,因此地震和测井曲线都可以视为内部关联和局部依赖的序列数据(韩宏伟等,2022).相比于卷积神经网络擅长考虑多道地震数据(或多条测井曲线)的局部相关性,循环神经网络更擅于捕捉地震(或测井)曲线的内部依赖性和时间(或深度)累计效应.因此,本文使用双向门控递归单元(Bi-GRU)这种循环神经网络作为数据驱动方法(Yuan et al.,2022;Sang et al.,2023),相应的工作流程如图1a—d所示.该方法采用5个Bi-GRU和1个线性回归层建立波阻抗智能预测网络(图1c),以完成单道地震记录和低频波阻抗曲线到波阻抗曲线的非线性转换.Bi-GRU主要从输入的地震数据或上一层学习到的低水平特征中进一步提取与波阻抗相关的更高水平特征,且多个Bi-GRU的组合可增强神经网络的非线性表达能力.线性回归层对Bi-GRU提取的特征进行线性变换,将其从特征域映射到目标参数域.该数据驱动方法的目标函数Ldata为
(9)

1.3 基于数据与模型联合驱动的波阻抗反演方法
Yuan等(2022)研究表明数据驱动方法具有精确恢复低频波阻抗的优势,遵从神经网络低频优先学习的原则(Qin et al.,2020).其原因可能是优先恢复占波阻抗幅值主体部分的低频波阻抗是目标函数Ldata收敛到极小值的必要条件.为缓解低精度的井插值初始模型对模型驱动方法的负面影响,本文结合数据驱动方法准确预测低频波阻抗和模型驱动方法准确预测中高频波阻抗的各自优势,提出一种基于数据与模型联合驱动的波阻抗反演方法.该方法利用数据驱动方法预测的波阻抗模型的低频分量替代井插值初始模型,从而为模型驱动方法提供更为准确的初始模型,最终提高波阻抗反演精度及效率.数据与模型联合驱动方法的工作流程如图1所示,其主要包括准备测试数据集(图1a)、数据驱动方法的训练数据集生成(图1b)、波阻抗智能预测模型构建(图1c)、数据驱动方法预测初始波阻抗结果(图1d)和模型驱动方法预测最终波阻抗结果(图1e)五大步骤.
具体地,图1a—d为数据与模型联合驱动方法的数据驱动部分,该部分首先对数据集提取(伪)井位置的地震和测井数据构建训练数据集.训练数据集中训练样本由井旁地震道和测井插值的低频波阻抗曲线组成,标签为波阻抗曲线.尽管测井插值的低频波阻抗不够准确,但它能为数据驱动方法提供低频趋势控制.其次,数据驱动方法通过以Bi-GRU和线性回归层为骨架,建立以式(9)为目标函数的波阻抗智能预测网络.该网络模拟模型驱动的反过程,对地震数据、低频波阻抗、波阻抗之间内在的统计性规律进行深度挖掘和数学表征,在高维空间表达它们的非线性映射关系.数据驱动方法推广到测试数据集预测的波阻抗结果Zdata表达为
Zdata=F(S;Zprior;θ).
(10)
为了减少数据驱动方法预测波阻抗的中高频分量对于后续基于模型的反演的负面影响,本文仅使用数据驱动波阻抗结果的低频分量low(Zdata)作为本文方法在模型驱动部分的初始模型.该初始模型相比于井插值初始模型Zprior的低频信息更加丰富和精细,起到了校正Zprior的作用.再次,low(Zdata)引入基于模型的反演,开展数据与模型联合驱动方法的模型驱动部分(图1e).该部分利用从地震剖面上提取的统计性地震子波生成子波矩阵W,接着使用low(Zdata)作为式(6)正则化约束项中的测井先验信息.模型驱动方法在给定初始模型和地震子波的情况下,通过褶积模型正演合成地震记录,并利用以下公式计算合成地震记录与实际地震记录的残差及正则化约束项误差:
(11)
其中,Zdata-model为初始模型是low(Zdata)情况下模型驱动方法预测的波阻抗结果.通过使用梯度下降算法最小化目标函数Ldata-model,实现迭代修改波阻抗模型.最后,当迭代次数达到设定的最大值或模型正演得到的地震记录与实际地震记录达到最佳匹配时,获得最终的波阻抗模型并结束反演.
1.4 评价指标
为评估三种方法的反演效果,选取结构相似性(SSIM)和预测误差(Q)分别作为定性和定量评价指标.结构相似性从亮度、对比度和图像结构三种角度综合衡量两幅图像的相似性(Wang et al.,2004).在波阻抗反演问题中,结构相似性用于评价真实波阻抗和预测波阻抗之间的相似性:
(12)

(13)

2 例子
2.1 合成数据测试
为验证本文方法,本节使用Marmousi模型数据(图2)进行测试.图2a为速度模型导出的波阻抗模型,其上部发育三条断裂带,中部发育泥灰岩背斜,深部两侧有高阻抗楔形体.基于式(4),图2b为正演合成的主频为35 Hz的无噪地震数据.本文将0~16 Hz、16~60 Hz和60 Hz以上的波阻抗分量依次称为低频阻抗、中频阻抗和高频阻抗.图2c为图2a经过0~16 Hz低通滤波后得到的低频阻抗模型.对比图2a和2c可以看出,低频阻抗反映了波阻抗的整体变化趋势,二者的差异主要体现在后者缺少波阻抗的局部变化细节.图2a—c的时间采样间隔都为1 ms,大小都为750×737,即含有737道,每道包含750个时间采样点.图2中的水平黑线代表解释的层位,红线和竖直黑线分别代表4口伪井的波阻抗曲线和地震记录,用于生成模型驱动方法的井插值初始模型和数据驱动方法的训练集.4口伪井的共深度点(CDP)位置分别为91、271、451和631.
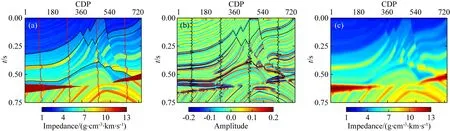
图2 基于Marmousi模型的合成数据
模型驱动方法应用于实际数据时经常使用井插值初始模型,而井插值初始模型在构造复杂和储层横向变化快等地质条件下难以提供准确的低频信息,导致预测波阻抗的误差较大.为说明井插值初始模型的局限性,本节首先采用合成数据进行测试.为模拟实际情况,利用4条波阻抗曲线(图2a红线)和3个层位(图2a黑线)进行内插外推建立的0~8 Hz井插值初始模型如图3a所示.图3a中蓝线为伪井位置对应的低频波阻抗曲线.波阻抗模型经过0~8 Hz低通滤波得到的初始模型如图3b所示.该初始模型在实际情况下难以获得,是一种理想化的初始模型.对比两种初始模型可以看到,仅依靠层位和有限的井曲线插值的初始模型的精度明显低于低通滤波初始模型.在目标函数Lmodel(式(8))的正则化参数λ设置为0.01和迭代次数设置为30次的情况下,模型驱动方法基于两种初始模型(图3a—b)反演的波阻抗结果分别为图3c—d.图3c—d与波阻抗模型(图2a)的SSIM分别为0.64和0.72,预测误差Q分别为0.80和0.29.对比图3c—d和图2a可以看到,整体上基于井插值初始模型的波阻抗结果(图3c)对于不同地层内的波阻抗差异刻画不够清晰,其预测精度不如基于低通滤波初始模型的波阻抗结果(图3d).进一步对两种波阻抗结果(图3c—d)进行0~16 Hz低频滤波,得到的低频阻抗分别如图3e—f所示.图3e—f与真实低频阻抗模型(图2c)的SSIM分别为0.75和0.94,预测误差Q分别为0.76和0.20.图3e—f比对应的初始模型(图3a—b)的低频信息更加丰富,说明地震数据的低频分量对恢复波阻抗的低频信息具有一定的贡献.但是,相比于图3f,图3e与真实低频阻抗模型(图2c)的差异仍然较大,说明提高模型驱动方法预测低频阻抗的准确性主要依赖于低频信息丰富且精确的初始模型.

图3 不同初始模型条件下模型驱动波阻抗反演结果
图4进一步探究了模型驱动方法的波阻抗反演效果与两种初始模型的截止频率的关系.截止频率越高,初始模型包含的低频信息越丰富.建立井插值初始模型时,仍然只使用4条波阻抗曲线(图2a红线)和3个层位(图2a黑线).图4a为不同截止频率情况下构建的低通滤波初始模型(记为Prior1)和井插值初始模型(记为Prior2)的SSIM组成的变化趋势线.其中,截止频率为8 Hz时(图4a黑圈)的井插值初始模型和低通滤波初始模型分别为图3a、b,二者的SSIM为0.64.图4a表明井插值初始模型与相同截止频率的理想初始模型的差异性随截止频率的增加而不断增大.图4b中绿线和红线分别表示模型驱动方法基于Prior1和Prior2反演的波阻抗的低频分量(0~16 Hz)与低频阻抗模型(图2c)的SSIM随初始模型截止频率的变化,蓝线和黑线分别表示模型驱动方法基于Prior1和Prior2反演的波阻抗的中高频分量(>16 Hz)与中高频阻抗模型(>16 Hz)的SSIM随初始模型截止频率的变化.从绿线和红线的对比可以看出,基于井插值初始模型(Prior2)比基于低通滤波初始模型(Prior1)预测低频阻抗的精度明显更低,表明初始模型的准确性对于模型驱动方法精确预测低频阻抗具有重要作用.此外,井插值初始模型的局限性还包括增大其截止频率只能缓慢提升低频阻抗的预测精度(图4b红线).图4b的蓝线和黑线说明增加两种初始模型的低频信息能稍微改善模型驱动方法预测中高频阻抗的效果.

图4 模型驱动波阻抗反演精度与初始模型截止频率的关系
图3和图4的测试说明了模型驱动方法基于井插值初始模型不能有效恢复构造复杂的Marmousi模型的绝对阻抗及低频分量.下面通过测试说明数据驱动方法具有精确恢复低频阻抗的优势,其预测的低频阻抗可以替代井插值初始模型,以作为一种新的初始模型提供给模型驱动方法.根据图1a—d所示的数据驱动方法工作流程,首先,抽取四口伪井位置的地震记录(图2b竖直黑线)、低频波阻抗曲线(图3a蓝线)和波阻抗曲线(图2a红线)作为波阻抗智能预测网络(图1c)的训练集.验证集为随机选取的其他四口伪井位置的数据,测试集由无噪地震数据(图2b)和井插值初始模型(图3a)组成.其次,波阻抗智能预测网络中每个Bi-GRU隐层状态变量个数设置为20,学习率设置为0.005,批尺寸设置为1,梯度下降算法使用自适应矩估计优化器Adam(Kingma and Ba,2017).再次,波阻抗智能预测网络基于目标函数Ldata(式(9))和反向传播算法等迭代300次后,训练损失和验证损失都收敛到极小值,保存此时得到的最佳网络模型.最后,应用波阻抗智能预测模型到测试集,预测的波阻抗结果如图5a所示.图5a与波阻抗模型(图2a)的SSIM和Q分别为0.61和0.62.图5b为图5a经过低通滤波后得到的0~16 Hz低频分量,其与低频阻抗模型(图2c)的SSIM和Q分别为0.76和0.56.图5a和图3c(或图5b和图3e)的对比表明,数据驱动方法相比于基于井插值初始模型的模型驱动方法整体预测误差更小,特别是对中下部的背斜和楔形体等构造恢复的低频阻抗更加接近真实低频阻抗.为进一步说明数据驱动方法更容易恢复低频阻抗,测试了16个不同训练集建立的智能模型预测的波阻抗效果.如图5c所示,这些训练集的井数量由4口逐渐增加到64口.图5c中红线表示数据驱动方法预测波阻抗的低频分量(0~16 Hz)与低频阻抗模型(图2c)的SSIM随着训练井数量的变化,黑线表示该方法预测波阻抗的中高频分量(>16 Hz)与相对阻抗模型(>16 Hz)的SSIM随着训练井数量的变化.图5c的红线说明整体上数据驱动方法预测低频阻抗的精度随着训练井数量的增加而上升,黑线说明增加训练井数量并不能明显改善该方法预测中高频阻抗的效果.其原因是训练井数量的增加提高了波阻抗预测网络的训练与建模质量,挖掘出更为准确的地震数据与波阻抗内在的统计性物理关系,从而主要改善了该数据驱动方法的波阻抗及低频分量的反演效果.此外,训练井数量的增加也使得训练集与测试集之间的分布差异减小,也可能提高了波阻抗预测网络的推广应用效果.图5c的红线和黑线都表现出一定的波动性,其原因可能是以训练井数量作为唯一变量时,波阻抗预测网络仍然维持上述4口伪井训练网络时的参数配置,使得该套网络架构及参数设置无法满足不同训练井数量情况下的建模效果都是最佳的,导致波阻抗结果的低频和中高频分量随着训练井数量增加而表现出波动上升的趋势.图5c的红线和黑线的对比表明数据驱动方法预测低频阻抗的精度明显高于预测的中高频阻抗.图5的测试表明数据驱动方法反演的波阻抗结果的频带范围低于测井标签的频带范围,若要利用数据驱动方法反演相对阻抗,则至少需要以频带更宽的(相对)波阻抗曲线作为标签训练神经网络.本文以绝对波阻抗曲线作为神经网络的标签的原因主要有两点:一是可以得到用于方法对比的数据驱动波阻抗反演结果;二是以该结果的低频分量作为本文方法模型驱动部分的初始模型,避免了另外使用相对波阻抗标签训练用于预测初始模型的神经网络.
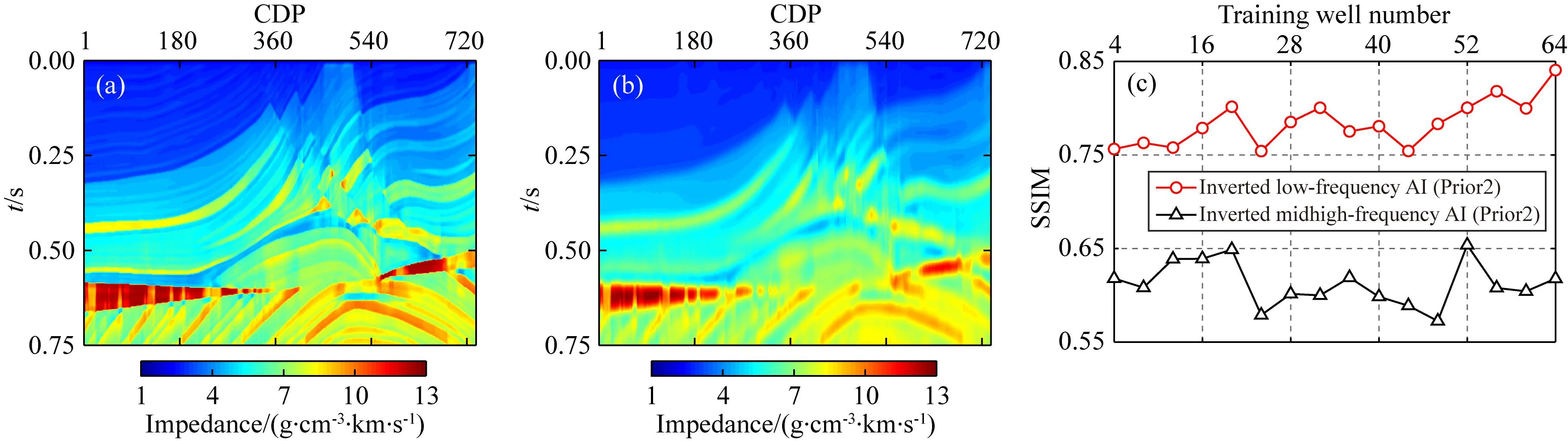
图5 数据驱动波阻抗反演结果
图3—图5的测试结果表明数据驱动方法比基于井插值初始模型的模型驱动方法预测波阻抗及其低频分量的准确性更高,而图5c的黑线和图4b的黑线对比则表明后者比前者预测中高频阻抗更加精确.因此,本文结合二者优势开展了数据与模型联合驱动方法的波阻抗反演测试.按照图1所示的工作流程,该方法分为数据驱动部分和模型驱动部分.数据驱动部分即为前面介绍的数据驱动方法,其波阻抗预测结果为图5a.图5a的中高频分量比其低频分量的反演质量要差,且在模型两侧的楔形体及中部断层区域预测结果的横向连续性相对较差.为降低这两种因素对于后续基于模型的反演的负面影响,本文仅使用数据驱动方法预测波阻抗的低频分量作为模型驱动部分的初始模型.该初始模型称为数据驱动初始模型(记为Prior3),其相比于井插值初始模型能够为模型驱动部分提供更准确的低频信息.模型驱动部分采用基于数据驱动初始模型的模型驱动方法,该模型驱动方法使用带有光滑特性的TK型正则化约束进一步降低数据驱动初始模型中的横向不连续性对于基于模型的反演的影响.目标函数Ldata-model(式(11))的正则化参数λ设置为0.01和迭代次数设置为30次时,基于模型的反演使用数据驱动初始模型替代井插值初始模型后,反演效率提高了约2倍.模型驱动部分预测的波阻抗结果如图6所示.图6a—b分别为Prior3的频带范围为0~8 Hz和0~16 Hz(即图5b)情况下,数据与模型联合驱动方法预测的波阻抗结果.图6a—b与波阻抗模型(图2a)的预测误差Q分别为0.61和0.57.图6a—b的0~16 Hz低频分量分别如图6c—d所示.图6c—d与低频阻抗模型(图2c)的预测误差Q分别为0.56和0.52.图6a—b(或图6c—d)与图5a (或图5b)的对比说明,本文方法相比于数据驱动方法的横向连续性得到了一定的改善.图6a(或图6b)、图3c和图5a的预测误差对比表明,数据与模型联合驱动方法比数据驱动方法和模型驱动方法预测的波阻抗更加接近真实模型.图6a、b(或图6c、d)的对比说明,频带范围更宽且更精确的数据驱动初始模型可以进一步提高数据与模型联合驱动方法的波阻抗反演精度.

图6 数据与模型联合驱动波阻抗反演结果
图7进一步对比展示了三种方法预测的波阻抗结果通过式(3)导出的反射系数的归一化振幅谱.图7中黑线为地震数据的振幅谱,红线、青线和蓝色虚线分别为真实波阻抗(图2a)、井插值初始模型(3a)和数据驱动初始模型(图5b)导出的反射系数的振幅谱,紫线、绿线和蓝色实线分别为模型驱动、数据驱动、数据与模型联合驱动方法预测的波阻抗导出的反射系数的振幅谱.模型驱动方法(紫线)和数据驱动方法(绿线)分别表现出低频预测不准和中高频预测不准的问题,而数据与模型驱动方法(蓝色实线)结合两种单一驱动方法的优势去弥补二者的各自缺陷,同时实现了不同频段波阻抗的精确预测,获得了更高分辨率的波阻抗结果.图8放大展示了Marmousi模型右下角部分的真实高频阻抗(>60 Hz)和对应的三种方法反演波阻抗结果的高频分量(>60 Hz).相比于真实高频阻抗(图8a),模型驱动方法和数据与模型联合驱动方法得到的高频阻抗(图8b、d)比数据驱动方法得到的高频阻抗(图8c)的准确性和分辨率更高,更加清晰地刻画了断层和背斜等构造内的地层界面位置.图8b、d基本相同是因为模型驱动方法和数据与模型联合驱动方法的波阻抗结果的高频分量主要来自于地震数据.

图7 模型驱动、数据驱动和数据与模型联合驱动方法预测的波阻抗导出的反射系数的归一化振幅谱对比

图8 三种方法预测的高频阻抗(>60 Hz)对比
为说明本文提出的数据与模型联合驱动方法具有更强的抗噪能力,最后测试了三种方法基于含噪地震数据的波阻抗反演效果.相比于无噪地震数据(图2b),含噪地震数据(图9a)包含的地质结构形态和边界等受随机噪声影响变得模糊不清.在目标函数Lmodel(式(8))的正则化参数λ设置为0.3的情况下,模型驱动方法基于含噪地震数据和井插值初始模型(图3a)迭代30次后得到的波阻抗反演结果为图9b.数据驱动方法直接利用基于无噪地震数据训练得到的波阻抗智能预测模型,测试含噪地震数据后得到的波阻抗结果为图9c.数据与模型联合驱动方法的数据驱动部分预测的波阻抗结果同样为图9c,之后图9c的低频分量(0~16 z)作为模型驱动部分的初始模型.设置目标函数L3的正则化参数为0.3,模型驱动部分经过30次迭代后得到的波阻抗结果为图9d.三种方法预测的波阻抗(图9b—d)相较于含噪地震数据(图9a)的信噪比明显提高,模型浅部断裂系统、深部背斜和两侧平缓地层等部位的波阻抗细节刻画较好.图9b—d和波阻抗模型(图2a)的对比说明,数据与模型联合驱动方法比模型驱动方法和数据驱动方法得到的波阻抗模型横向连续性更强且分辨率更高.图9b—d和图2a的预测误差Q分别为0.87、0.68和0.60.
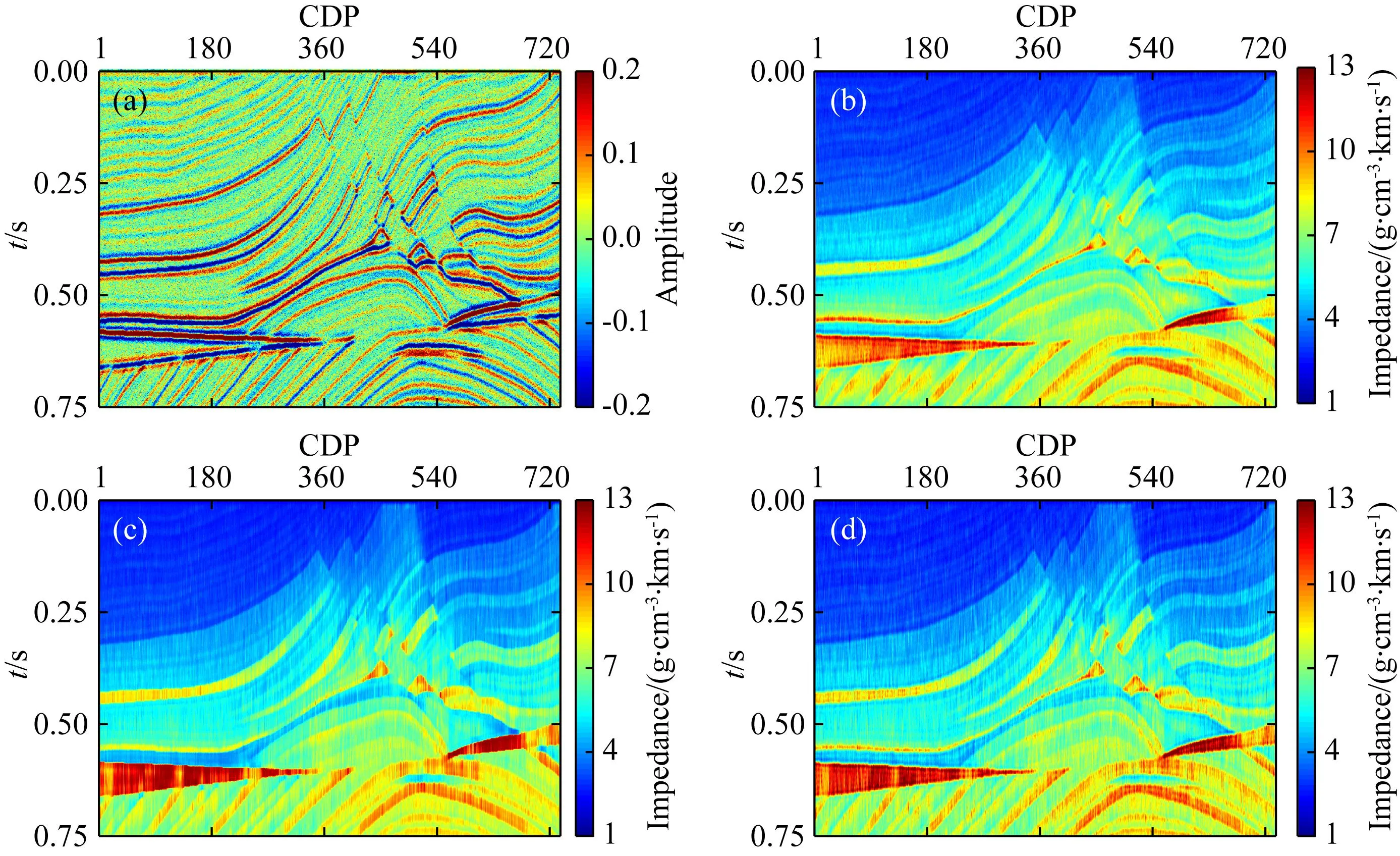
图9 三种方法的含噪数据测试结果对比
2.2 实际数据应用
最后,使用来自中国东部某油田的偏移叠加数据进行实际应用测试,进一步验证数据与模型联合驱动方法的有效性与优越性.该工区为以砂岩和泥岩为主要岩性的整装油藏.目标储集层埋深相对较浅,约1300~1500 m.储集层以上发育以“泥包砂”为主要特征的网状河和曲流河,储集层内发育以“砂包泥”为特征的辫状河流沉积.储集层发育心滩坝、辫状河道、河缘和河道间滩等沉积微相.从上到下,储层砂体逐渐增厚,泥岩夹层逐渐减薄.储层物性极好,平均孔隙度约为30%,平均渗透率约为1~2 μm2.
图10a为经过6口井(W1~W6)的连井地震剖面,其近似垂直于物源方向,储集层的地震传播时间范围约为1.2~1.3 s.该地震剖面含有141道,其空间采样间隔和时间采样间隔分别为12.5 m和2 ms.如图10a的虚线所示,6口井对应的CDP编号依次为31、62、75、85、113和128.图10a中的水平黑线代表解释的地震层位,层位之间的地震数据对应着以辫状河为主要沉积特征的储集层单元.受河流频繁变迁和断层的影响,储集层岩性横向变化快且非均质性强,垂向上砂泥岩薄互层交错分布.在地震剖面上表现为地震同相轴连续性整体较差,局部较零碎.图10b—c分别为从地震剖面储集层附近(1.15~1.35 s)提取的统计性子波及其振幅谱.通过声波时差和密度曲线计算获得6口井位置的波阻抗曲线,并基于统计性子波进行精细的井震标定.6口井合成的地震记录与对应的井旁地震道的平均相关系数为0.79.
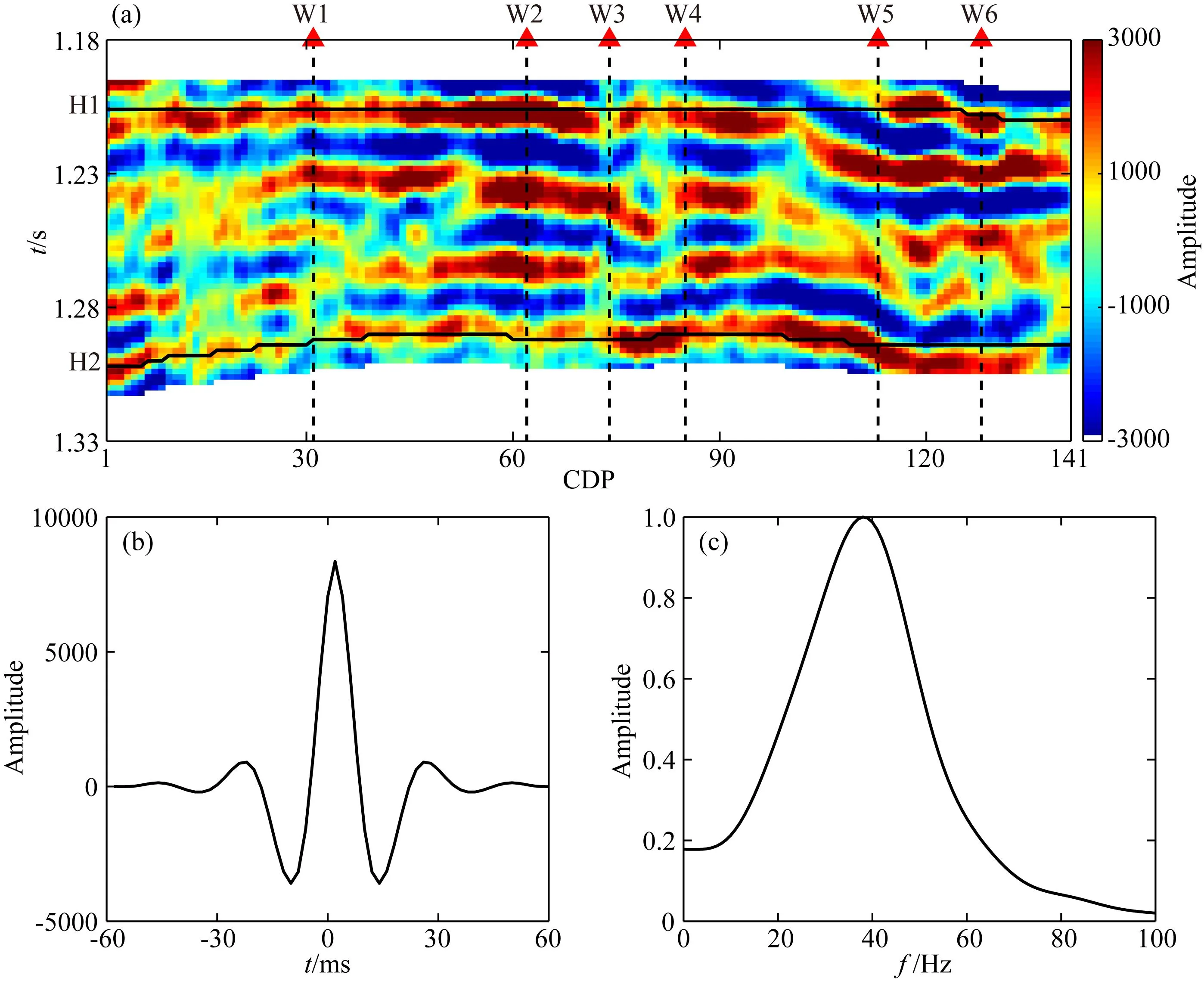
图10 实际地震数据
接下来,基于实际数据分别开展三种方法的波阻抗反演测试.模型驱动方法首先基于6口井位置的波阻抗曲线和地震层位建立波阻抗初始模型.反距离加权插值法建立初始模型容易产生“牛眼”现象,最终选用克里金插值法得到的初始模型如图11a所示.模型驱动方法基于井插值初始模型(图11a)反演的波阻抗结果如图11b所示.图11b整体上横向连续性较好,且吻合井位置的波阻抗变化趋势.由于井插值初始模型提供的光滑低频背景没有充分体现不同空间位置的低频阻抗差异,使得模型驱动方法在迭代过程中主要依靠地震数据匹配更新预测的波阻抗模型.最终,其预测的波阻抗结果(图11b)与实际地震数据(图10a)具有过高的相似性.数据驱动方法采用W5井作为测试盲井,其余5口井作为波阻抗智能预测网络的训练井.考虑到储集层与上覆地层的沉积环境存在较大差异,因此每口训练井只使用储集层附近1.10~1.32 s内的地震记录和波阻抗曲线参与网络训练.为减小高频阻抗对于网络收敛稳定性和收敛速度的影响,每口训练井的标签为原始波阻抗曲线经过0~120 Hz低通滤波得到.波阻抗智能预测网络(图1c)的输入为5口井位置的井旁地震道和井插值低频阻抗曲线,输出为预测的波阻抗曲线.经过300次迭代后,保存当前建立的网络模型.之后将波阻抗智能预测模型推广应用到由实际地震数据和井插值初始模型组成的测试集.若数据驱动方法相比于模型驱动方法的盲井测试精度更高,且波阻抗反演结果的纵横向分辨率较高,则认为数据驱动方法的波阻抗反演效果良好.根据以上的盲井验证和反演结果的分辨率评价准则,通过不断优化网络参数,直到寻找到最佳的波阻抗智能预测模型.其预测的储集层附近的波阻抗结果为图11c.盲井检验说明该预测结果相比于井插值初始模型更好地反映了储集层由浅到深的阻抗变化趋势,但纵向分辨率较低.最后,本文进一步使用数据与模型联合驱动方法进行测试.数据与模型联合驱动方法使用数据驱动方法预测的波阻抗的低频分量作为低频模型,之后开展基于模型驱动方法的波阻抗反演.其预测的波阻抗结果为图11d.图11d相比于实际地震数据和两种对比方法预测的波阻抗结果(图11b—c)分辨率更高,不同辫状河河道砂体之间的波阻抗差异刻画更加清晰.图12进一步对比了三种方法在W5盲井位置的波阻抗预测结果及相对误差.图12中蓝线和紫线分别为参考波阻抗曲线和井插值低频阻抗曲线.图12a—c中黑线、绿线和红线分别为模型驱动、数据驱动和数据与模型联合驱动方法在W5井位置预测的波阻抗曲线,三者与参考波阻抗曲线都具有一定的相似性,吻合波阻抗的低频变化趋势.但是,本文方法比其他两种方法的预测结果更加接近参考波阻抗曲线.图12d中黑线、绿线和红线分别为三种方法预测的波阻抗与参考波阻抗之间的相对误差.三种方法在W5井位置预测结果与参考结果之间的平均相对误差分别为7.8%、7.0%和4.1%,说明本文方法相比于另外两种对比方法在盲井(W5)位置具有更高的预测精度.
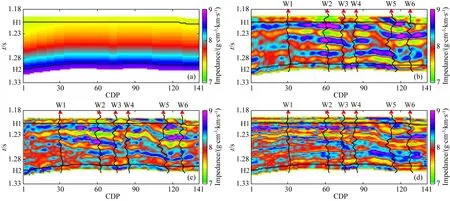
图11 三种方法的实际数据测试结果对比
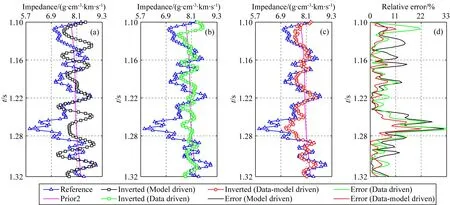
图12 三种方法在W5盲井位置的测试结果对比
3 结论
通过结合数据驱动方法准确预测低频阻抗和模型驱动方法准确预测中高频阻抗的各自优势,本文提出一种基于数据与模型联合驱动的波阻抗反演方法.数据测试得到的结论如下:
(1) 基于模型的反演这种模型驱动方法的反演精度依赖于初始模型.低精度的井插值初始模型包含的低频信息越少,越容易降低模型驱动方法反演波阻抗的效果与效率.
(2) 基于双向门控递归单元的数据驱动方法反演的波阻抗的频带小于其测井标签的频带.不同训练井数量的测试表明该方法优先拟合波阻抗的低频及中频分量,其高频分量预测效果相对较差.
(3) 数据与模型联合驱动方法利用数据驱动方法反演的波阻抗的低频分量替代井插值初始模型,为基于模型的反演提供精细且丰富的低频信息,提升了基于模型的反演预测波阻抗的准确性和分辨率.
(4) 本文方法更适用于横向变化较快的河流相储层,相比于其他两种方法可以更加清晰地刻画储集层内不同砂组的波阻抗差异.
本文方法预测高频阻抗的精度仍然受限于地震数据的频带范围和基于模型的反演的非线性拟合能力,需要进一步研究高分辨率波阻抗反演的新方法.未来还计划开展不同地区、不同成熟度的工区和不同储层类型的数据测试,以进一步探究本文方法的推广能力和适用条件.
