基于PI建模和反步滑模控制的主动波浪补偿策略
2024-02-02张蒸忠洪逸帆顾邦平
张 琴,张蒸忠,洪逸帆,顾邦平,胡 雄
(上海海事大学物流工程学院,上海 201306)
当前世界各国都在加大对海洋资源的开发和治理[1],习近平总书记在《自然资源部南海局海洋科技创新发展规划(2021—2025)》中明确提出要重点实现突破“大型海洋平台起重机制造能力”的目标,大力促进海洋资源开发和海洋工程装备行业的发展,对于加快深远海基地建设有重要意义。海上风电是一种对海洋资源利用的一种有效方式[2],海上风机的装机容量逐年递增,海上风机零部件安装要求做到快速和精准,且要覆盖更广海域和海况,这对安装风机的工程设备提出了较高的要求[3]。波浪补偿对海上货物装载设备的精准安装及加快海上远洋建设有着极其重要的意义[4]。
海洋中的复杂波浪运动会对船舶造成升沉、艏摇、横摇、横荡、纵摇、纵荡等6个自由度的姿态变化[5]。其中,升沉运动是造成海上装配不稳和吊装失准的关键因素[6],会导致吊装补给作业时发生吊物碰撞危险,甚至会对人员的生命安全造成损害[7]。对船舶进行波浪补偿控制[8],可实现船用吊机、舷梯、栈桥在海况恶劣的情况下安全、平稳、有效地完成作业任务,对提升中国海洋资源的开发技术和船舶补给能力具有重要的战略意义[9]。中国在波浪补偿控制的研究起步较晚,但近年来在起重机和补给装置、补偿系统模型和控制策略的研究上有了显著进展。邱志成等[10]研究了一种具有波浪补偿功能的船用起重机,能有效防晃。石怀斌等[11]对起重臂上的斯图尔特(Stewart)并联补偿机构进行了运动学与动力学研究,通过仿真验证了此并联机构波浪补偿的可行性和范围,结果表明,Stewart平台可应用于船载起重机的波浪补偿。但是,该研究领域存在的模型不精确及系统有时滞问题,严重影响了控制精度,故研究面临着在复杂多变海况下建立精确补偿模型和设计合适控制算法的挑战。
机理法建模需要明确各环节的机理和参数[12],较难建立精确模型,且随着使用过程的磨损,组件参数会改变,机理模型产生偏差。特别地,针对存在迟滞现象的Stew art平台模型来说,机理法建立的模型精度不高,而采用实验测试法可以对整个系统进行分析,消除机理法对参数敏感的缺点。Duhem迟滞模型是以Duhem算子来描述非线性迟滞现象的,由5个控制参数构成的线性微分方程组成,可实现控制参数的在线调整[13]。麦克斯韦(Maxwell)模型认为力和位移之间的滞后是由库伦摩擦力引起的,而且M axwell模型的非线性迟滞特性可以由线性弹簧表达[14]。Preisach模型是通过对滞后曲线中某一点的位移进行插值来获得其他点的位移值[15]。Prandtle–Ishlinskii(PI)迟滞模型是以Preisach迟滞模型为基础建立的[16],由多个含有不同参数的play迟滞算子叠加构成,play算子的迟滞特性是由输入、输出信号及阈值决定的[17]。建立迟滞模型可以更好地描述系统的时变非线性,从而设计出精度高、响应快的系统控制器。
在控制方法中,因为在控制系统中存在许多不确定的干扰,所以需要采用相应的控制方法得到精准补偿。卢道华等[18]采用比例–微分–积分(PID)控制方法补偿小艇收放时的摇晃,实验证明,该方法提高了补偿系统的响应速度,但具有一定的滞后性。谷肖等[19]设计了由串联式起重臂与并联式波浪补偿机构组合的混联式补给装置,同时采用模糊PID控制方法,实现了目标船的位姿补偿。Zinage等[20]提出了一种基于深度强化学习的主动升沉补偿控制器,通过仿真验证了补偿器在不同海况下的工作能力和抗干扰能力。模糊PID将模糊控制和PID控制结合,深度强化学习则是在不断与环境交互中评判奖励值来训练模型,都有相应的效果,但是这两种方法的实现比较复杂。反步法是非线性控制器设计中的一种重要方法,其可将标量函数和控制器的设计过程系统化和结构化,可以控制相对阶数为n的非线性系统[21]。滑模控制本质上是一种非线性控制,即控制结构随时间变化[22],可以完全消除系统中确定界的匹配干扰,而反步法对于消除非匹配不确定的干扰具有良好的效果,两者相结合的反步滑模控制方法可以将两者的优点相结合[23]。
鉴于PI模型能够很好描述系统的迟滞非线性,本文首次对补偿系统建立了PI迟滞模型,提高了模型的精度。针对复杂多变海况下补偿控制的准确性需求,采用终端反步滑模控制方法进行闭环补偿,保证了快速性和准确性,同时算法简单,易于实现。
本文提出了基于PI建模和反步滑模控制的波浪补偿策略。首先,基于PI迟滞模型建立补偿平台模型;然后,以李雅普诺夫第二方法为核心,运用反步滑模控制方法设计系统控制律,对非线性补偿系统进行稳定性控制;最后在4~5级规则和皮尔森·莫斯科维茨(P–M)不规则船舶运动下,通过Matlab仿真比较不同控制方法的效果,并在Stewart并联浮式平台上进行验证。
1 Stewart并联平台系统PI迟滞建模
1.1 搭建Stewart系统的PI模型
本文采用Stewart串联浮式平台模拟船舶的升沉运动与相应的补偿运动,平台组成如图1所示。系统由上平台和下平台构成:下平台为6自由度波浪模拟平台,用来模拟实际船舶升沉运动;上平台用于波浪补偿的电缸控制系统,由工控机和电缸驱动补偿系统组成,电缸驱动补偿系统包括运动控制卡、伺服驱动器、电缸执行机构。平台通过工控机控制电缸动作补偿下平台的升沉运动,并通过激光传感器检验补偿精度。

图1 主动升沉补偿系统平台Fig.1 Platform of the electric cylinder active heave compensation system
由于数据采集和运动控制在数据传输时会产生时延,且在不同位移输入下的电缸动作会产生不同的时延,这些时延会造成系统控制效果变差甚至失稳,使用常规机理法建立的电缸数学模型已无法满足系统补偿控制精度要求,因此,本文研究了在不同升沉位移输入下的电缸时延问题,并建立了系统的模型,以达到系统高精度的补偿。
当浮式平台中的电缸伸缩时,对于同一个输入位移值,对应有多个连续的输出位移值,称为迟滞现象。迟滞现象具有多值映射性,即输入信号不变时,可能有两个或以上的输出量与之对应,即形成一种环形结构,称为迟滞环。图2为PI迟滞特性曲线图,一般迟滞特性曲线如图2中实线部分所示。图2中,x(t)、y(t)分别为迟滞模型或单个算子的输入、输出,t为时刻,ri代表play算子的阈值,i表示第i个play算子。

图2 PI迟滞特性曲线图Fig.2 PIhysteresis characteristic curve
PI模型是Preaisach模型的子模型,用斜坡函数特性代替Preaisach模型中具有阶跃函数特性的迟滞元,以逐点逼近迟滞特性,所以具有运算量小、结构简单、求逆方便等优点[24]。PI模型通过加权叠加不同阈值的线性play算子来逼近迟滞特性,且由于play算子是解析的,因此被广泛应用于各种控制系统,play算子如图2中的虚线所示。
单个play算子公式的表达式为:
式中:T为采样周期;ri为第i个算子阈值,其中,i∈[1,n],n为算子个数,n越大,模型的精度越高,但计算量也随之增大。为了将模型数据更快速的处理计算,可将单个算子写成式(2)形式:
不同的加权值wi和不同阈值共同组成不同的PI迟滞模型,其过程如图3所示,其中,F为加权叠加后的总输出迟滞模型。

图3 play算子加权Fig.3 Play operator weighting
当模型具有初始条件时,yri的初值yri(0)为:
图3中PI模型的数学表达式可表示为:
式中,wi为第i个p lay算子的加权值,w为权重向量,w=(w1,w2,···,wn),为阈值为r的算子输出。因此,式(4)代表PI迟滞模型,通过辨识参数w和r便可得到PI迟滞模型,在此采用递推最小二乘法来辨识。
1.2 递推最小二乘法辨识PI模型
最小二乘法由高斯最早提出用于预测行星运动轨迹,之后奥斯顿把最小二乘法应用到系统辨识中,该方法是最基本、最经典的辨识方法之一[25]。
一个2阶受控自回归模型可表示为如下形式:
式中,u(k)、y(k)分别为在离散时间点k处输入和输出的信号值,G(z)为被控对象的传递函数,其中,z为算子。G(z)常用形式如下:
b0b1a1a2z-1z-2
式中, 、 、 、 为需要辨识的参数, 、 为延迟算子。将式(6)写成差分方程形式为:
将式(7)改写成矩阵形式为:
式中, θ为待辨识的参数向量,h(k)为中间结果,数据向量φT(k)为离散时间点k处输入、输出的历史数据。将系统中的m个历史输入、输出数据代入式(8),建立m个方程组关系式,写成矩阵如下所示:
式中,Y为m个y的历史数据,H为m个的历史数据矩阵。
最小二乘法的核心是残差的平方和最小,因此取准则函数:
式中,e为实际值和迟滞模型输出值的残差,j为残差的标号,对式(10)求导可得:
由式(11)可以得到正则方程:
由此可以求得待辨识参数 θ:
为了解决式(13)的计算量较大和对矩阵求逆的复杂运算问题,推导得最小二乘法的递推形式,如下所示:
式中:N为递推次数;K N+1为比例系数;P N为中间结果,对应的是式(13)中的(HTH)-1;θN+1为递推辨识出的参数向量。将需辨识的参数初值和P矩阵初值赋予式(14),通过递推就能得到系统参数b0、b1、a1、a2,即可得到辨识后的PI模型,并对其进行控制。
2 基于反步终端滑模的控制策略
2.1 反步终端滑模法
反步控制法响应时间长,需要一段过渡时间才可以跟踪上期望信号;而终端滑模控制方法存在抖振现象,系统状态在滑模面上来回滑动。因此,本文采用反步控制和终端滑模相结合的方法提高系统的响应速度与跟踪精度。
设x1为补偿系统的位移,x2为速度,u为系统输入,将式(6)的传递函数化为状态方程:
基于式(15)建立的PI迟滞模型,根据李雅普诺夫稳定性,设计反步终端滑模控制方法,步骤如下:
1)引入第1个虚拟量,设补偿系统需要跟踪的期望值为x1d。则电缸系统的当前时刻补偿位移偏差e1为:
2)定义李雅普诺夫函数如下:
式中,V1为定义的第1个李雅普诺夫函数,对V1求导可得:
分析得,为了使系统稳定,V˙1需要小于0,定义滑模面s=e2=x2-x2d,e2为x2的跟踪误差,x2d为第2个虚拟变量,并设为:
式中, β、q、p为x2d的正系数,且q、p都为奇数,在此设β=1、q=3、p=3。
3)为证明以上设置能使系统稳定,定义第2个李雅普诺夫函数V2:
对V2求导,将式(19)和(15)代入可得:
式中,sgn(s)为s的符号函数,ε为一个正数,k为大于0的常数。将式(22)代入式(21)的滑模面的导数s˙中,可得系统的控制律如下所示:
2.2 李雅普诺夫稳定性证明
将 β=1、q=3、p=3代入式(19),可得期望升沉位移的变化率为:
将式(22)代入V1的导数式(18)中得:
由于ε和k大于0,则式(26)恒小于等于0,故由李雅普诺夫第二方法可知:x2渐进稳定,有x2收敛于x2d,使得式(25)中等于,可知小于0,进而由等于,可知小于0,因此,系统是渐进稳定的。此时控制量u为:
式中,s=x1-x1d-+x2。
故针对系统迟滞模型,即可根据李雅普诺夫稳定性设计控制量u,从而使波浪补偿控制系统稳定。
3 仿真分析与实验验证
3.1 波浪谱及船舶运动
基于PI迟滞模型和反步终端滑模控制法理论分析,进一步针对4~5级海况下的规则波和不规则波的船舶运动补偿控制做仿真实验及平台试验,验证主动控制补偿算法的有效性,并与单一使用反步法和滑模法、PID、强化学习进行比较。
海况是风力作用下海表面的运动状况,1802年英国海军博福特将军根据20 a的海况观测数据制作了风速级表,并首次制作了10级波级表,如表1所示,现已成为全球通用的国际海浪等级划分标准与依据[26]。

表1 海况等级表[26]Tab.1 Sea state class table[26]
3级波浪较小,4~5级海况下是大浪,6级狂浪会出现风暴波,不易开展海上作业,故本文通过船舶动力学AWQA软件生成某工程船在4~5级海况中规则波和PM不规则波下的船舶运动,并进行建模和波浪补偿控制研究。
3.2 搭建Stewart平台的PI模型
浮式平台存在迟滞特性,为了更好地对浮式平台电缸的迟滞输入、输出形式进行描述,本文采用PI模型来提高电缸的模型精度。取4个play算子,同时将上平台的电缸输入、输出数据中经过PI算子模型可以得到新的输入、输出形式,输入、输出关系如图4所示。
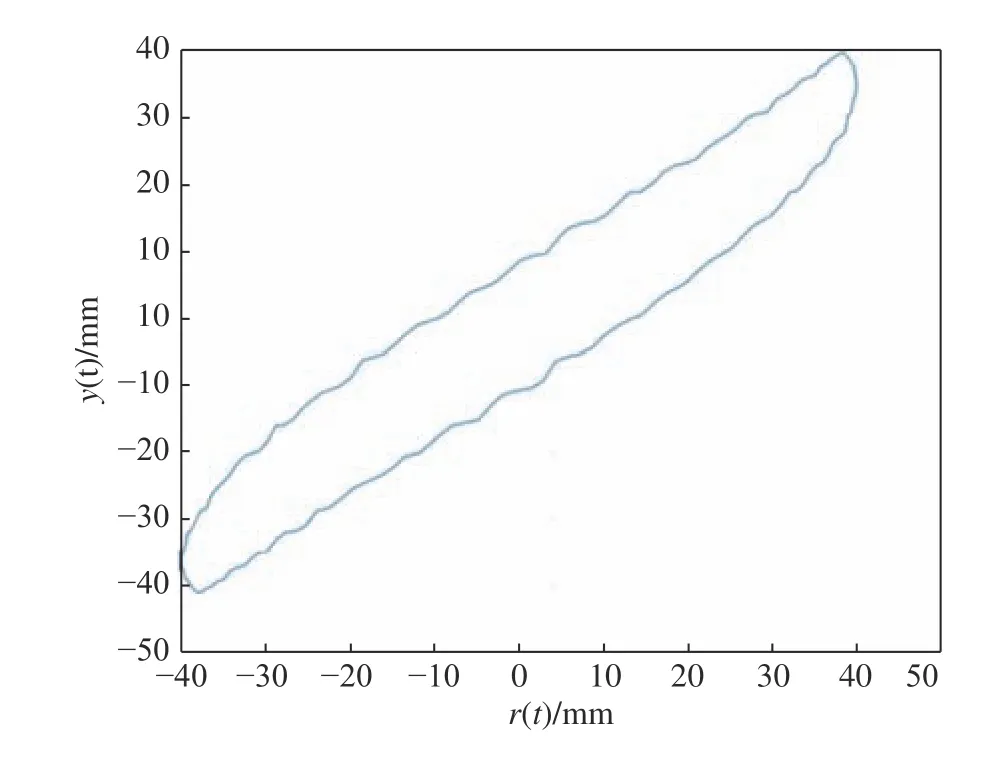
图4 浮式平台输入、输出关系曲线Fig.4 Floating platform input and output relationship curve
4个play算子下的新输出关系如图5所示,其中,y1、y2、y3和y4分别为4个算子的取值。
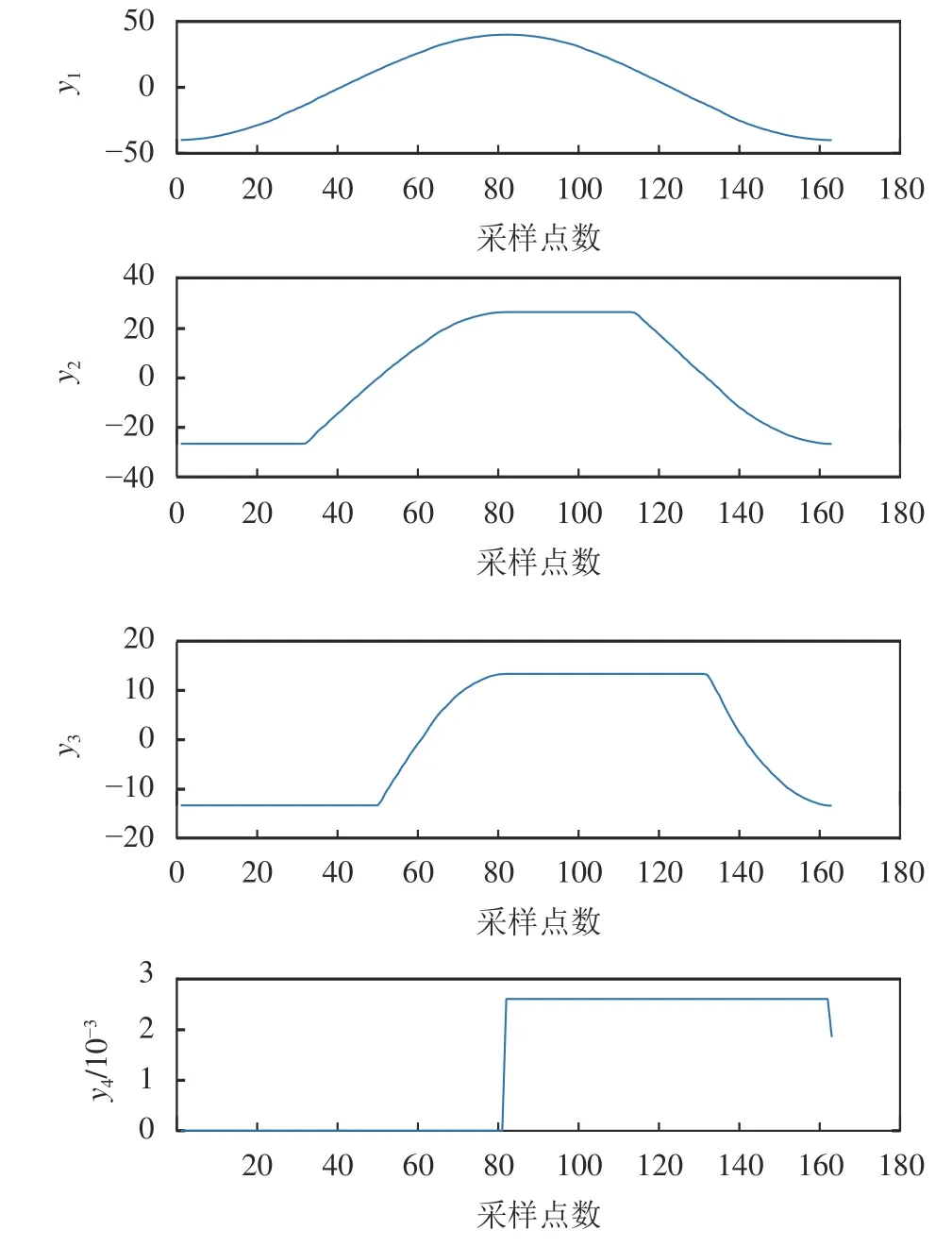
图5 4个play算子下的输出数据Fig.5 Output data under four play operators
利用式(4),计算w的数值。
模型参数w如下所示:
因此,系统传递模型如下所示:
将模型数据对应的控制率代入式(27)中,得:
采用递推最小二乘算法来对PI模型进行辨识,辨识结果如图6所示。在图6中,横坐标为采样点数,纵坐标为位移值,蓝线为浮式平台实际输出位移值,红线为辨识PI迟滞模型的输出位移值,橙线为两个模型之间的误差值。从图6中可以看出,经过PI迟滞模型可以让浮式平台的模型更精确,可计算得到模型的均方根误差eRMSE为0.796 8,有较高的精度。
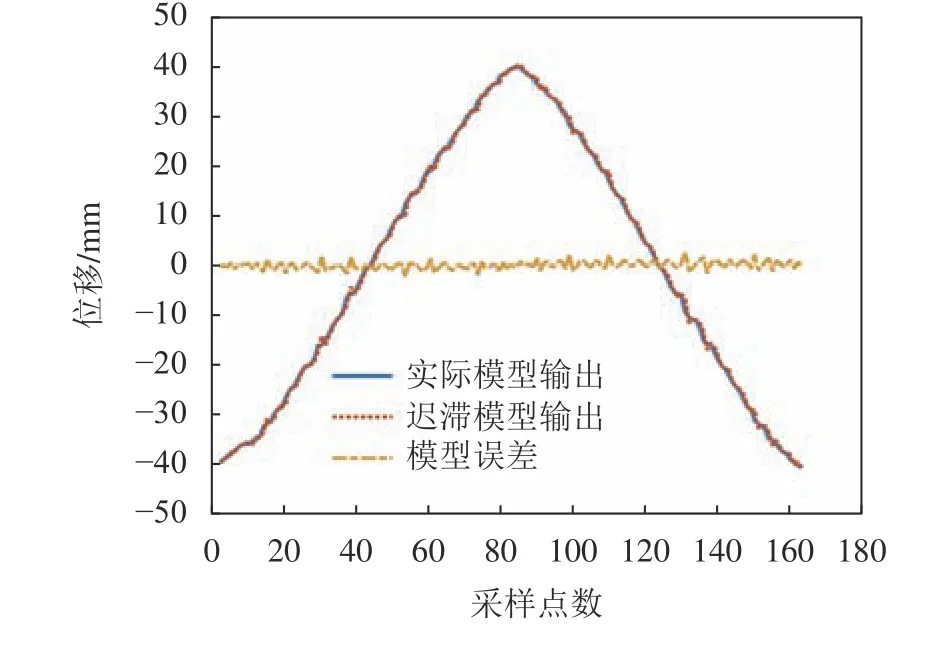
图6 递推最小二乘法辨识PI模型Fig.6 Recursive least squares identification of PI model
3.3 规则波下船舶运动的控制策略仿真
首先采用4级和5级海况下的规则波船舶运动的数据进行控制策略的仿真,选择幅值H为2 m和周期T为8s的4级规则海况、H为3.5m和T为1 0 s的5级规则海况,得到船舶运动数据。
用4级海况下的规则波船舶运动仿真数据做控制仿真实验,为了说明所提出反步终端滑膜算法的优势,分别采用PID控制、反步法、终端滑模法、强化学习和反步终端滑模来进行控制。PID是发展成熟及使用可靠的经典控制方法,拥有较好的鲁棒性和精度;反步法有精度高、计算量小等优点;滑模控制在稳定性和精度方面有优势,能较好地用硬件实现;强化学习是一种智能优化控制方法,通过自学习训练,可生成成熟的网络,实现多变环境下的自动适应控制。以上方法在波浪补偿领域应用广泛,具有代表性。与这几种方法对比,更好体现所提出方法的优势。图7为4级海况规则波下船舶运动补偿跟踪效果比较。
图7的结果表明,各种方法补偿4级海况规则波的效果各不相同,由图7中的放大部分可以看出:PID在控制的前3 s内有比较大的过冲,比期望值要大,虽然PID控制速度加快了,但实际输出产生了超调;而反步法和终端滑模法则稍落后于期望值,这表明系统响应不够快速;基于强化学习的控制方法误差较大且有抖振,可见对复杂系统有效的强化学习需要基于大量训练数据;而反步终端滑模法的控制效果较其他方法要好,在15 s内就能较好地跟踪期望值,虽然在期望值附近有较小的抖振,但误差一直较小。
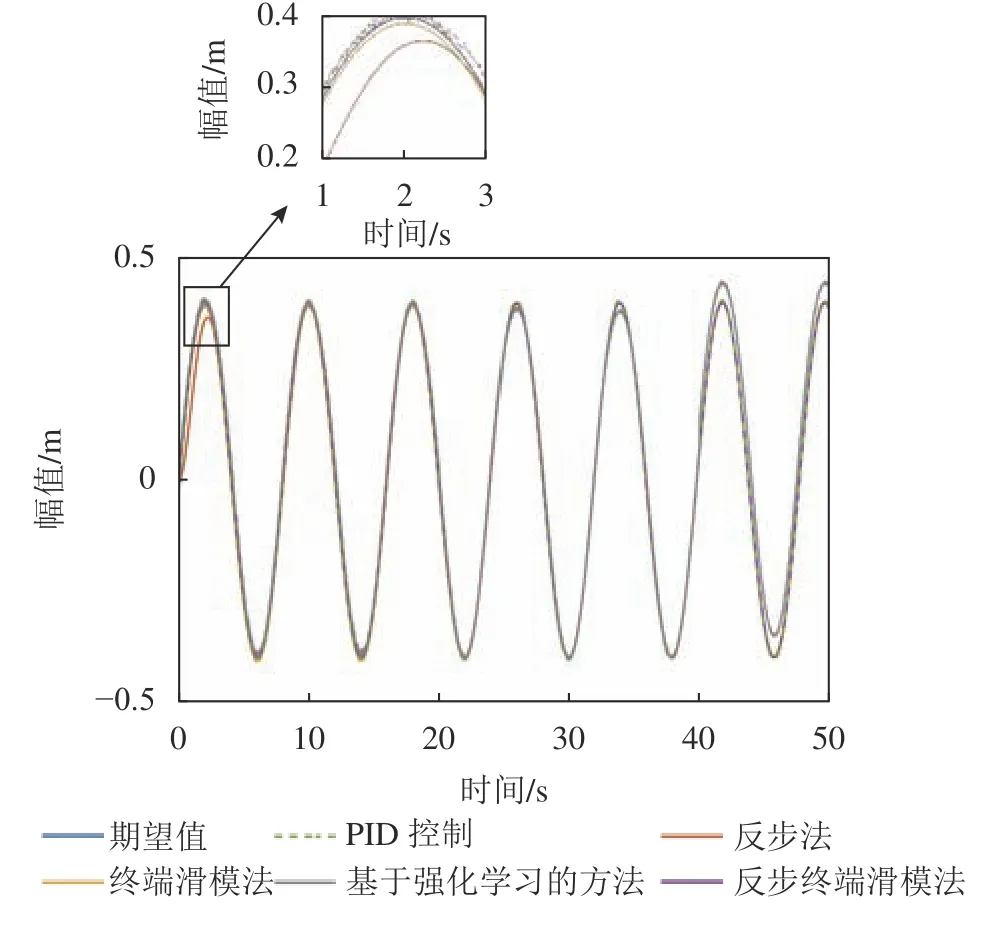
图7 4级海况规则波下船舶运动补偿跟踪效果比较Fig.7 Comparison of compensation tracking effects under four level sea state regular waves
图8为5级海况规则波下船舶运动补偿效果比较。图8的结果表明,5级海况下船舶运动的幅值比4级的大,各控制方法的效果也受海况影响而不同,从放大部分可以看出:PID控制仍然有过冲;反步法在3.10 s后才跟踪上期望值,比4级海况规则波下响应慢了0.10 s,但之后的控制补偿误差也基本无静差;终端滑模控制方法响应时间为5.00 s,在波峰处的补偿误差较大;基于强化学习的方法仍存在抖振,在波峰处误差很大;反步终端滑模控制方法响应时间只有0.15 s,响应速度快且补偿误差小。
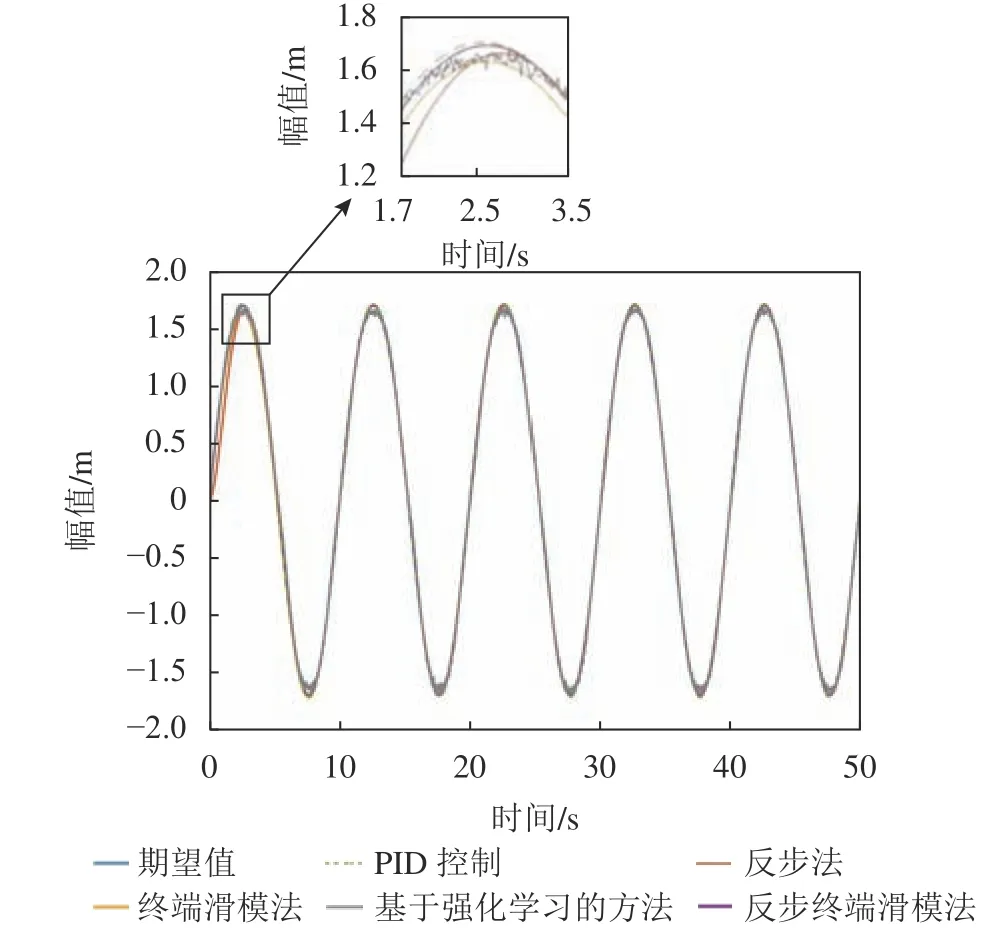
图8 5级海况规则波下船舶运动补偿效果比较Fig.8 Comparison of compensation tracking effects under five-level sea state regular waves
用均方根误差eRMSE和补偿精度δ来评估跟踪效果,其中,δ定义如下:
式中,L为采样点数。
表2为4级和5级海况规则波下控制方法的性能比较,从表2中可以看出,无论是4级还是5级海况,PID控制的eRMSE介于反步法和终端滑模之间,终端滑模控制方法的eRMSE虽然比反步法补偿误差小,但是 δ比反步法稍差。强化学习的eRMSE和 δ都不如其他控制方法,可见在单自由度模型中无法发挥强化学习的优势。反步终端滑模的eRMSE最小,补偿精度最高。对比4级和5级海况下补偿控制效果可知,5级海况下各种控制方法补偿的eRMSE变大,但反步滑模方法的 δ仍较高。所以综上可得:反步滑模法能够快速跟踪给定规则波下的船舶运动;同时,也拥有较高的控制精度,优于其他4种方法。
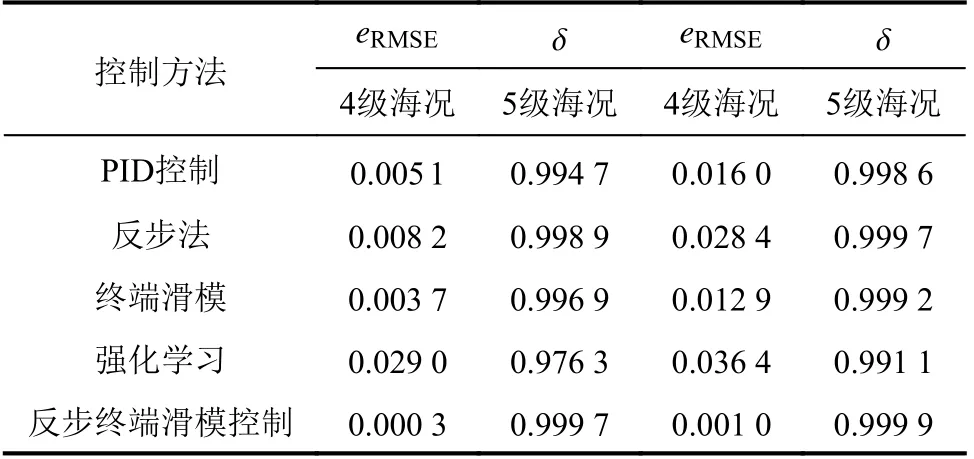
表2 4级和5级海况规则波下的控制方法比较Tab.2 Comparison of control methods under regular waves of level 4 and level 5 sea conditions
3.4 不规则波下船舶运动的控制策略仿真
通常使用海浪谱密度表达式来模拟真实的海浪情况,皮尔森·莫斯科维茨(PM)谱是莫斯科维茨根据北大西洋多年的海浪运动的观测数据进行了大量的波谱分析,经过相关处理得到的有因次的谱密度函数。由于PM谱是由广阔海域海浪运动测得,能很好表示不同海域下需补偿的波浪运动,所以本文使用PM谱进行仿真。
采用4级海况下的不规则波船舶运动仿真数据做控制仿真实验,不同控制方法对4级海况不规则波的跟踪效果仿真实验结果对比如图9(a)所示,图9(b)为0.00~20.00 s的局部放大图。
由图9(a)可知,5种控制方法都能对期望值进行跟踪。但是,从图9(b)中可以看出:PID控制在信号变化过大时有一定的超调,需要经过约4.00 s的时间后才能较好跟踪期望值;反步法在2.00 s后补偿误差值就能达到较小;终端滑模控制方法在25.00 s后跟踪上升沉位移,但补偿效果较差,且在波峰波谷处存在较大的抖振现象;基于强化学习的控制输出能跟踪船舶运动,但一直存有毛刺,可见没有训练出最优模型;而滑模反步法能在1.0 s内快速地跟踪期望值,但是输出值会存在一定的抖振。对比图7中4级海况规则波下船舶运动的补偿跟踪效果可以发现,控制方法对不规则波下的船舶运动补偿跟踪响应减慢。
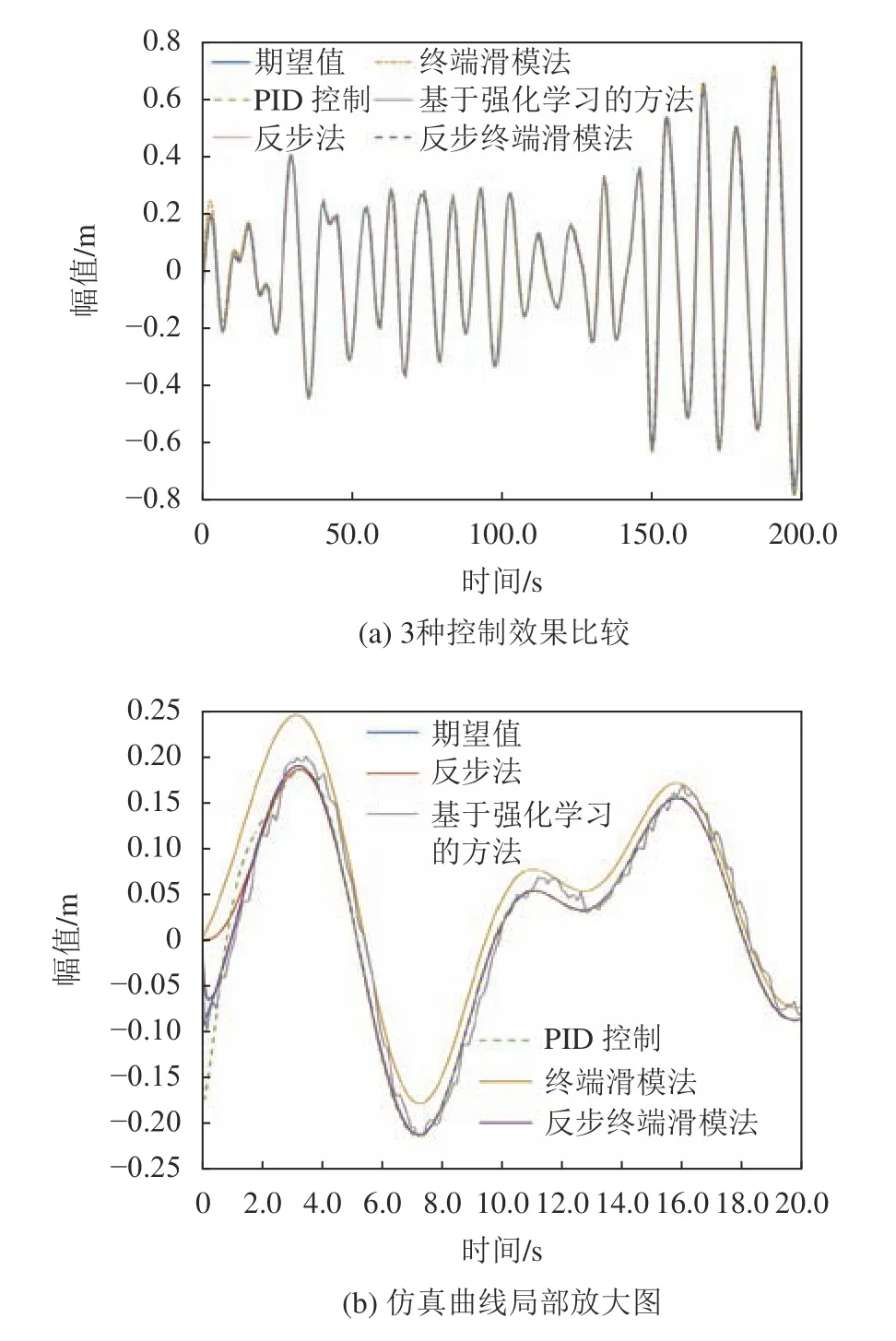
图9 4级海况不规则波下船舶运动补偿跟踪效果Fig.9 Comparison of compensation tracking effects under fourth-level irregular waves
采用5级海况不规则波下的船舶运动做控制仿真实验,不同控制方法对5级海况不规则波的跟踪效果仿真实验结果对比如图10(a)所示,图10(b)为0~20.0 s的局部放大图。
由于5级海况的幅值频率变化大,同时对比4级海况不规则波下船舶运动的补偿跟踪效果可以发现,5级海况下的跟踪补偿效果略有降低。由图10可见:因为期望值幅值变大,PID控制的跟踪效果也相应的变差,在7.0 s后才能较好地跟踪上期望值,其后跟踪误差大于4级海况;反步法响应时间为3.2 s,其后补偿误差值较小,比规则波下船舶运动的补偿跟踪速度慢且跟踪效果较差;终端滑模控制方法响应时间为20.0 s,在波峰波谷处存在较大的抖振现象,总体补偿效果较差,因此不适合在不规则波海况下做波浪补偿控制;基于强化学习的控制方法在5级海况之下还是会存在有毛刺的情况;反步终端滑模控制方法响应时间为0.7 s左右,可见其能快速、较好地跟踪期望值,适合于不规则波的补偿控制。

图10 5级海况不规则波下船舶运动补偿跟踪效果Fig.10 Comparison of compensation tracking effects under five-level irregular waves
表3为在4、5级海况下,不同方法的eRMSE和δ。比较不同方法的指标可得,反步终端滑模法的eRMSE相比PID控制、反步法、终端滑模法和强化学习分别减少了40%、62%、70%和77%。可见反步终端滑模法在控制精度上仍优于另外4种方法,虽然在5级海况时补偿精度有略微的降低,但是依然具有很好的补偿效果,与4级海况时的不规则波及规则波下的控制情况类似。
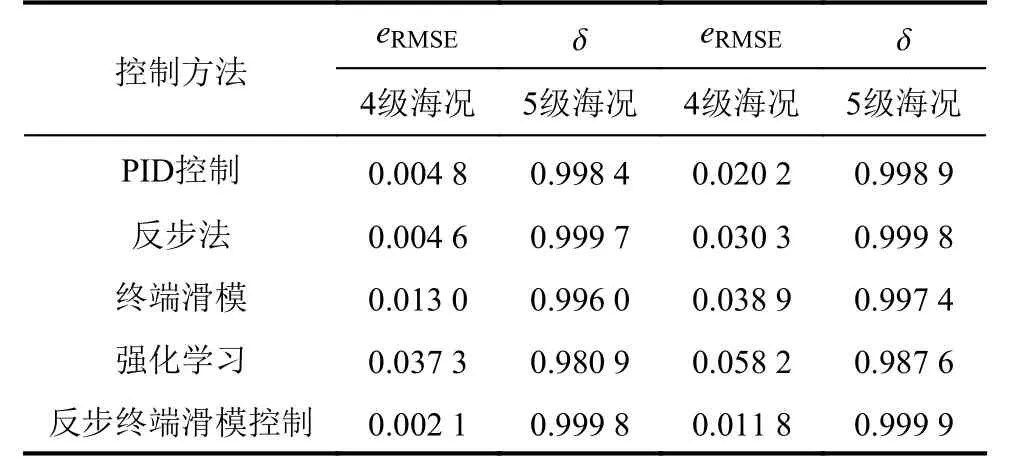
表3 4级和5级海况不规则波下的控制方法比较Tab.3 Comparison of control methods under irregular waves of level 4 and level 5 sea conditions
由规则波和不规则波下的船舶运动补偿控制仿真实验可得:PID控制具有快速性和超调矛盾的问题;反步法响应不够快速;终端滑模在波峰波谷处存在较大的抖振;强化学习的训练数据较少,模型不够精确;而反步终端滑模具有响应快、跟踪性能高的优点,能有效的进行波浪补偿。以上仿真实验需要经过硬件试验平台验证,才能说明建模和补偿控制方法在复杂多变海况下应用的可行性。
3.5 基于浮式平台的波浪补偿控制试验分析
本节在实验室的Stewart波浪补偿浮式平台系统上验证主动控制补偿算法在实际硬件上能否有效运行,鉴于平台条件所限,主要验证本文提出的反步终端滑模补偿控制算法和PID算法在4级海况规则波下的可行性与有效性。在工控机中编写反步终端滑模补偿控制算法C#语言程序,输出控制信号给主动升沉补偿系统平台动作,通过激光传感器采集实际补偿平台位移,用其与期望位移的差值比较来判断补偿效果。
Stewart平台升沉补偿系统的流程如图11所示,主要分为3个阶段:
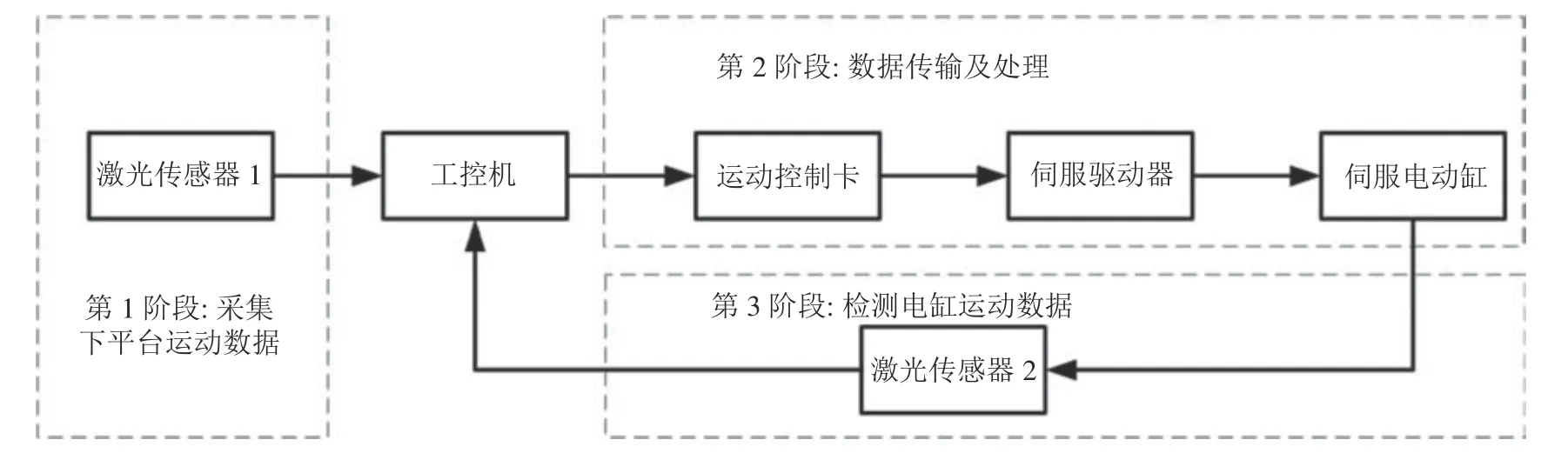
图11 电缸主动升沉补偿系统流程图Fig.11 Flow chart of the electric cylinder active heave compensation system
第1阶段:利用具有高精准性的激光传感器1采集下平台模拟的波浪数据,同时传输到工控机中。由此可以精确地检测到下平台的升沉位移信号。
第2阶段:在工控机上编写C#语言控制策略算法程序,通过外围组件互联(PCI)总线传输到运动控制卡上。运动控制卡接受指令并向伺服驱动器发送指令,使伺服驱动器带动电缸运动,以此补偿下平台的升沉位移。
第3阶段:由激光传感器2检测上平台电缸的补偿运动,得到补偿位移数据再传回工控机来检测补偿精度,形成补偿控制的闭环,进一步调整控制策略。
由于船舶运动模拟平台的量程限制,故将幅值按比例缩小10倍,因此在图1中的船舶运动模拟平台输入周期为10 s、幅值为40mm的正弦运动数据,同时按照图11中升沉补偿3阶段流程进行浮式平台的波浪补偿试验,两种方法对期望值的跟踪效果的试验结果如图12所示。

图12 反步终端滑模控制和PID控制在4级海况规则波下船舶运动的补偿效果Fig.12 Compensation effect of different control methods in level 4 sea state regular waves
对比图12和7可以看出,在试验平台上的补偿效果比仿真要差一些,在试验平台上反步终端滑模和PID补偿存在滞后,反步终端滑模滞后时间约为0.1 s,PID的滞后更大,这是由于无法消除的传输迟滞与电缸特性导致的。计算PID的补偿均方根误差有0.896 8,反步终端滑模补偿均方根误差为0.332 4,补偿精度达到0.972 9,有很好的补偿效果,可满足4级海况规则波下的船舶海上作业。
最新研究表明[27–28],单一海况规则波下的波浪补偿精度在90%~99%,本文研究4、5级海况下规则和不规则波船舶运动波浪补偿,仿真结果补偿精度在0.999 8以上。4级海况规则波下的船舶运动波浪补偿的硬件平台验证结果表明,补偿精度也达到了0.972 9以上,具有实际应用价值。
4 结 论
本文考虑了补偿系统的迟滞特性,建立补偿系统的PI数学模型,并提出了方便硬件实现的反步滑模算法对系统进行控制补偿,针对波浪补偿浮式平台的迟滞特性,对平台进行了建模和控制策略的仿真,结论如下:
1)所搭建的4个play算子的PI迟滞模型具有良好的精度,能够较好描述浮式平台的非线性迟滞问题的影响。
2)所提控制方法在4~5海况下的规则波谱和不规则PM谱下对某工程船运动的仿真和试验结果表明,运用反步终端滑模控制方法响应时间快,且补偿误差小,能达到0.972 9以上的补偿精度,可满足船舶海上作业的稳定性需求。
由于建模及补偿精度受采集数据的准确性及硬件条件的影响而有不同。未来将探索不基于模型的深度学习控制算法,并应用于3个自由度的船舶姿态运动补偿,来提高控制的精度和实用性。
