迈向责任的分配正义:自动驾驶交通事故的归责逻辑
——基于语境主义的视角
2024-02-01张晒
张 晒
(安徽大学 社会与政治学院, 安徽 合肥 230601)
一、 问题的提出
当前, 人工智能突飞猛进, 促进了自动驾驶技术的飞跃发展。 自动驾驶在很大程度上改变了所涉主体的权责形式和利益格局, 尤其是改变了驾驶事故责任的主体结构, 从而对责任分配提出新要求, 并带来一个新的分配正义问题, 即自动驾驶交通事故责任的正义分配[1]。 “如何确定责任主体问题, 不仅涉及司法实践领域, 更与哲学上的道德判断有关, 也与逻辑上的责任界定有关。”[2]从哲学上的道德判断来讲, 自动驾驶交通事故责任应该如何正义分配? 对于这一问题,国内外学术界从不同的角度展开了一些研究。
自动驾驶起步之初,一些研究者对自动驾驶交通事故责任的正义分配一度表现出悲观情绪。比如,玛强特等[3]就认为,在自动驾驶场景中,无论是部分自动驾驶还是完全自动驾驶,自动驾驶系统与驾驶员之间的责任分配都会异常困难;哪怕自动驾驶的事故场景确定是由技术问题导致,由于自动驾驶系统往往涉及多个不同生产商,即存在多个潜在责任方,这会进一步加剧责任分配的困难。
随着自动驾驶的进一步发展,研究者们对自动驾驶交通事故责任的正义分配的研究态度发生了转变。在一些研究者看来,自动驾驶交通事故责任的正义分配关键取决于人工智能的自动驾驶系统能否或应否作为道德主体[4]。如果人工智能的自动驾驶系统不能作为道德主体,那么,自动驾驶系统就不能承担相应事故责任,进言之,自动驾驶交通事故责任分配就无从正常展开。围绕自动驾驶系统能否或应否作为道德主体产生了很多争论。有研究者认为,自动驾驶系统不具有“自由意志”和“电子人格”[5],“不具备人类所拥有的道德决策和反思能力,也不具备人类的道德地位”[6],“无法复制、模拟和超越人类主体性”[7-9],因而无法承担交通事故责任。也有研究者持相反的观点,认为在大数据及算法的精确控制下,自动驾驶系统具有人类思维、辨认与控制能力及行为选择权[10],“常常像人类一样思考”[11],是超脱于人类指令存在的独立意思表示主体[12],可以赋予自动驾驶系统人工智能法律人格或直接法律人格,为其设立责任基金账户,由其独立承担事故责任[13-14]。两派的观点针锋相对,至今尚未形成定论。
在另一些研究者看来,上述争论无关紧要。潘恩荣等[15]打破了以上僵局,他们在对人工智能的两种技术设计思路——“人工的智能”(AI)和“智能增强”(IA)——进行区分的情况下,提出基于AI(机器取代人类)思路的人工智能应用出现伦理问题时应问责设计者,基于IA(智能增强)思路的人工智能应用出现伦理问题时应问责使用者。参照此观点,在自动驾驶交通事故中也可以让其他主体来代表或代替自动驾驶系统扮演道德主体角色。比如,有研究者认为,可以由自动驾驶汽车所有人或使用人来代替自动驾驶系统承担责任[16];还有研究者认为,相较于消费者(自动驾驶汽车所有人或使用人),生产商(包括研发者与生产者)处于控制危险的最佳位置,可以将自动驾驶系统的责任转移给生产商,即“系统控制,生产商负责”[17-18]。进言之,可以直接赋予生产商以严格责任或者以是否通过监管机构审批为标准区分生产商的事故责任[19]。总之,将自动驾驶交通事故责任分配聚焦于强人工智能的自动驾驶系统能否或应否作为道德主体上,对解决自动驾驶交通事故责任分配问题并没有实质意义。
在人类能够代表或代替自动驾驶系统承担事故责任的观点支持下,一些研究者又在国际自动机工程师学会(SAE)对汽车自动化进行六级划分的基础上引申出自动驾驶交通事故责任划分方案,认为自动驾驶系统属于其背后民事主体(汽车生产者)侵权的工具,主张通过分析和论证不同道路交通参与主体注意义务的不同和对机动车支配程度的不同来确定责任主体进而分配责任[20-22]。具体来说,在半自动驾驶状态时,要么由自动驾驶汽车使用者承担责任,要么由自动驾驶汽车生产商承担责任,要么由二者共同承担责任[5];在处于完全自动驾驶状态时,自动驾驶系统完全掌控机动车运行,负担所有注意义务,应当承担所有事故责任[23]。即便是对乘客或人类驾驶员课以严苛的注意义务或谨慎驾驶义务,要求承担过失责任,也极为勉强,甚至不合乎道德理性[24]。
以上观点受到另一些研究者的质疑,他们指出,根据国际自动机工程师学会建立的对汽车自动化的六级划分标准对自动驾驶侵犯责任进行划分有一定的参考价值,但也存在商榷之处:其一,在自动驾驶的Level 3~Level 4中,由于驾驶员不同于机器,信号接收延时、接收时误操作等状况都可能发生,从而导致引发事故的责任分配很难进行[2]。其二,由于人工智能的深度学习能力使智能汽车在自动驾驶中对现场的预测和作出决策可能超出生产商的预见,造成的损害后果难以直接归因于生产商[25]。其三,在自动驾驶中,由于预测人机互动方式的内在复杂性和机器产品的相对自主性,让生产商尽到充分注意义务进而承担完全责任很困难[26],而且,会加重生产商的负担,不利于自动驾驶发展[25]。其四,忽略了机动车所有人和使用人存在分离的情况,进而忽视了此种情况下应该由汽车所有者、驾驶员与汽车生产商共担责任的事实[23]。客观地讲,四点质疑也很中肯。
针对完全自动驾驶情况下生产商担责过重而影响自动驾驶发展的质疑,有研究者提出应根据其社会有用性容许其危险性,将注意义务在行为人、受害人和社会之间作出合理配置,把原来由生产商或使用者承担的注意义务分配一部分给社会或受害人[25]。这具有启发性,但缺乏道义基础,难以获得社会支持。
为此,有研究者进一步提出,解决自动驾驶事故责任分配问题,需要构建超越道义论和功利主义算法的自动驾驶道德算法[27-29],即参与方在碰撞中形成基于最大化最小值算法决策的道德关联,相应地产生各种形式的责任[30]。这一观点用正义的标尺衡量并分辨了自动驾驶中各参与主体的事故责任,有一定的道义基础和现实应用价值,但实际上各个主体在无知之幕下根本无法公允地论辩如何设计自动驾驶算法[31];况且,其本质还是在对人的生命安全和身体健康进行量化[32],没有同等地对待事故中每一个主体的生命安全,违背直觉正义。一言以蔽之,根据最大化最小值算法决策进行事故责任分配也背离了正义。
综上所述,既有研究展现了学术界对自动驾驶交通事故责任的正义分配的积极关注和深度思考,不乏理论启迪意义和现实借鉴价值,但也存在明显不足,主要表现在:第一,围绕自动驾驶交通事故责任分配所做的研究更多地停留于就事论事层面和一般性的问题与对策层面,着重于讲述“应该怎么做而非为什么要这样做”的逻辑,相对缺乏伦理层面的思考及相应的理论建构,即使个别研究从伦理层面借用罗尔斯正义论对自动驾驶交通事故责任正义分配进行了探索,但也面临着与正义相悖的困境。第二,缺乏从总体上对自动驾驶交通事故责任分配进行宏观思考。自动驾驶交通事故责任分配牵涉面广,影响深远,有必要将其放在当下宏阔的时代背景以及未来长远的发展趋势中进行整体性谋划和研究。基于此,本文将吸收既有研究成果,并站在时代与社会发展的高度,选取合适的理论视角对自动驾驶交通事故责任的正义分配进行宏观上的理论建构。
二、 社会语境、意义与正义:自动驾驶交通事故责任分配的理论框架
语境主义正义理论家沃尔泽[33]论述道:既有的分配正义的各种理论总是这样描述分配过程,“人们向(别的)人们分配物品(goods,也译作善)”,将分配的焦点“集中在代理人和物品的领受者身上”,而不是集中在物品即善上;然而,现实情况并非如此,现实情况是,“人们构思和创造出物品,然后在他们自己当中进行分配……构思和创造优先于(物品)并控制分配(物品)”。对沃尔泽的这段话作进一步分析,可以阐述为两点:①正义分配不是任意的,而是依据人们所共享的关于“善”是什么,以及它们的用途何在的观念摹制出来的,即分配是由“善”的意义所决定的;②“善”的意义是产生于社群的文化背景(语境)当中的,即“善”的意义是由社群的文化背景(语境) 所决定的[34]。反过来可以浓缩为一句话:善所处的社会语境决定了善的社会意义进而决定了善的正义分配。
沃尔泽的语境主义正义论对于自动驾驶交通事故责任分配具有重要的启发价值。换言之,语境主义正义论可以运用到自动驾驶交通事故责任的分配上。由此,本文的理论预设为,自动驾驶交通事故责任是社会诸善中的一种。作为社会诸善之一的自动驾驶交通事故责任会面临不同的社会语境,不同的社会语境会赋予自动驾驶交通事故责任不同的社会意义,而不同的社会意义则决定了自动驾驶交通事故责任会形成差异化分配原则。这是自动驾驶交通事故责任正义分配的理论逻辑。据此,形成本文的理论框架,见图1。
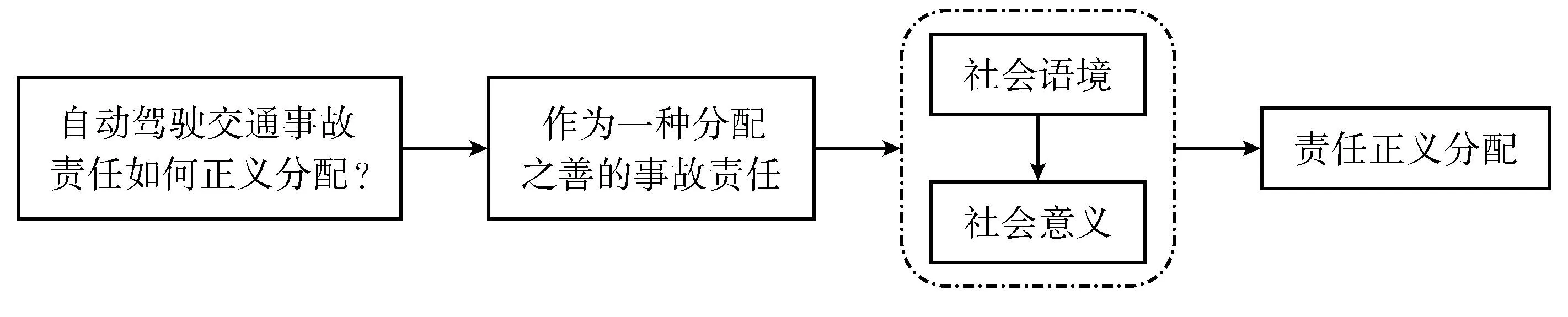
图1 自动驾驶交通事故责任正义分配的理论框架
三、 不同“社会语境”中事故责任的不同“社会意义”
“社会虽然是以相互联系的‘构成性的自我’而组成的一个有机整体,但是,整个社会并非‘不可分割的铁板一块’或‘整齐划一’的整体,而是被不同的社群进行了区隔或划分”[35]87,即表现为不同的领域。在不同的领域中会产生或存在不同的善,这也意味着不同的善会面对不同的社会语境(1)文化背景与社会语境既可以是一体两面的关系,也可以是从属于关系。就前者来说,将文化背景看成一个整体,作为一个整体的文化背景就是一个社会语境;就后者来说,将文化背景看成是由不同的领域或部分所构成的有机体,构成文化背景的不同领域或部分就是主体所处的一个个社会语境,社会语境涵括在文化背景当中。不管是哪一种,文化背景与社会语境的关系都可以表示为文化背景决定或生成社会语境。虽然人类社会分成了不同的文化背景,即不同的国家或民族拥有不同的文化背景,但不同的文化背景之间并不是完全相斥和对立的,而是拥有程度不同的“共同道德”,即“厚的共同道德”和“薄的共同道德”。由于拥有“共同道德”,因此,生活在不同文化背景中的主体仍然可以处于相同的社会语境当中,从而对特定善拥有“共享理解”,进而特定的善在不同文化背景中呈现出相同的社会意义。或处于不同的社会语境当中。而且,“物品(善)并没有残忍的‘自然的’意义,它们仅仅是通过某种解释和理解的过程,获得了‘观念和创造’的意义”[36]。换言之,善本身不具有“意义”,善所拥有的“意义”来自于善所处的社会语境,进言之,它表现为特定的群体对特定的善的“共享理解”,即“特定的人群因出生环境、成长经历、直面情景等大致相同而形成的能够相通的情感和认知”[35]118。因此,不同的社会语境除了赋予不同的善以不同的形态和名称之外,更重要的是会让不同的善拥有不同的社会意义。即使对于同一种善而言,其所面对的社会语境也会发生变化。当社会语境发生不同变化时,同一种善也会跟着被赋予不同社会意义。一言以蔽之,在不同社会语境中,不管是不同善还是同一种善,其社会意义都是不同的。
自动驾驶交通事故责任是一种分配之善。自动驾驶交通事故责任会面临两个不同层面的社会语境,分别为宏观层面的社会语境——因与社会中其他善相区分而生成的社会语境,以及微观层面的社会语境——因面对不同主体而生成的社会语境。以下分析这两个层面的社会语境及其决定的事故责任的社会意义。
1. 宏观社会语境及其决定的事故责任的社会意义
从宏观上看,作为分配诸善之一的自动驾驶交通事故责任(设为善A)所处的社会语境与社会中其他善所处的社会语境是不同的。在此,不妨选取分配诸善之一的人类手动驾驶交通事故责任(设为善B)作为比较分析的例子。如果将善A所处的社会语境看作语境A,那么,可以将善B所处的语境看作语境B。由于语境A与语境B是不同的,所以,处于语境A中并由语境A所决定的自动驾驶交通事故责任的意义(设为意义A)与处于语境B中并由语境B所决定的人类手动驾驶交通事故责任的意义(设为意义B)也是不同的,见图2。
语境A究竟是一种什么样的语境?分析语境A需要聚焦两个核心元素,即“人工智能”与“自动驾驶”。当前,人工智能的飞速发展使人类进入到一个新的时空当中,没有任何人能够完全脱离或拒斥人工智能的影响,人们再也回不到前人工智能时代。尽管有很多人还不适应人工智能对其生活带来的影响,但他们对于这种影响是无能为力的。人工智能的飞速发展也带动了自动驾驶的发展。随着人工智能向纵深发展,自动驾驶也将成为取代人类手动驾驶的必然选择。自动驾驶成为一种历史的必然,没有任何力量能够阻挡自动驾驶发展的历史潮流。虽然基于人工智能的自动驾驶对车辆的控制能力要强于人类手动驾驶对车辆的控制能力,但基于人工智能的自动驾驶还是不能完全避免失控或误操作的风险,这意味着自动驾驶的风险还是存在的。这样一来,人们是带着对自动驾驶的谨慎乐观的心情来迎接自动驾驶。这就是自动驾驶交通事故责任所处的社会语境。
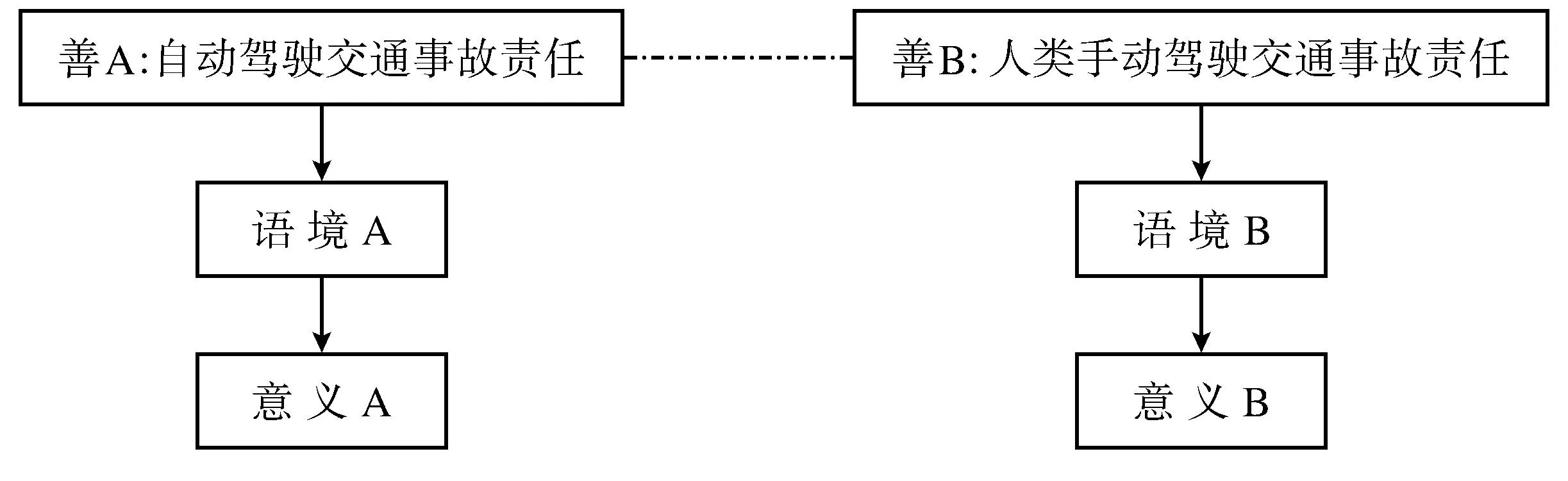
图2 不同宏观社会语境决定的交通事故责任的不同社会意义
这样的一种社会语境决定了善A的社会意义。 如前所述, 善A的社会意义实质上是人们对善A产生的“共享理解”。 具体来说, 对于善A, 人们的“共享理解”是, 通过对人进行协调性的心理触动和整合性的利益调适, 促进人与人之间、人与机(自动驾驶)之间更好地融合发展。 这便是善A的社会意义。 在此, 还是以善B为例。 人类手动驾驶交通已经有几百年的历史, 发展中造成了无数交通事故, 对人们的生命财产安全造成了的巨大损失。 面对手动驾驶, 人类迫切需要新的驾驶方式来取而代之。 这是善B所处的社会语境。 按照这样的语境, 人们对善B产生的“共享理解”是, 通过对人进行事后的惩戒和威慑, 减少交通事故从而保证交通秩序和社会和谐稳定。 这也是善B的社会意义。 显而易见, 善A与善B不同的社会语境决定了二者拥有不同的社会意义。
2. 微观社会语境及其决定的事故责任的社会意义
从微观上看,作为分配之善(A)的交通事故责任不会总是处于同一社会语境中,而是会处于变化着的社会语境中。变化着的社会语境源于善A会面临着不同的主体,自动驾驶交通事故涉及的主体主要包括自动驾驶系统、生产商、汽车所有人、乘客、行人、政府等。相应地,就形成善A面对的六个社会语境,分别称之为语境1、语境2、语境3、语境4、语境5、语境6等。由于语境1与语境2、语境3、语境4、语境5、语境6是不同的,所以,处于语境1中并由语境1所决定的善A的意义,与处于语境2中并由语境2所决定的善A的意义,与分别处于语境3、语境4、语境5、语境6中,并由其各自所决定的善A的意义也是不同的,分别将它们设为意义1、意义2、意义3、意义4、意义5、意义6,见图3。
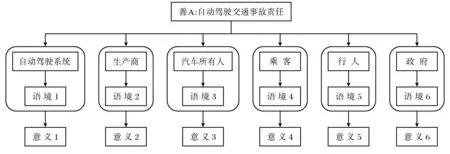
图3 不同微观社会语境决定的交通事故责任的不同社会意义
我们来看善A即自动驾驶交通事故责任所面对的六个语境及相应的意义。
语境1及相应的意义1:支持自动驾驶的智能系统是由人工设计和生产的,并不具备像人一样的主体地位。不过,“虽然自动驾驶算法不具备主体地位,但其在驾驶中的决策主导性至少部分地替代了人的主体性和能动性”[37]。其表达的意思是,自动驾驶并不完全是由人主导和支配的,自动驾驶具有等同于甚至在某些方面超越于人的功能,能够按照自己的理性和意志运行。由这样的语境,可以得出意义1,即对于自动驾驶系统而言,自动驾驶交通事故责任是特定行为导致的后果。
语境2及相应的意义2:一般来说,在生产自动驾驶汽车的过程中,生产商会本着尽可能地让不同的主体都满意的目标来生产出安全行驶的自动驾驶汽车。但生产商并不能保证自动驾驶汽车始终按照预先设计好的程序运行,即自动驾驶汽车不出现任何的差错和闪失。由这样的语境,可以得出意义2,即相对于生产商而言,自动驾驶交通事故责任是类似于生产成本的一种特定的社会成本。
语境3及相应的意义3:汽车所有人(有时也是不操控自动驾驶汽车的驾驶人)对自动驾驶汽车拥有所有权和使用权,自动驾驶汽车行驶产生的各种后果与汽车所有人存在不可分割的关系。由这样的语境,可以得出意义3,即相对于汽车所有人而言,自动驾驶交通事故责任是其必须认领的自我附属性损失。
语境4及相应的意义4:乘客乘坐自动驾驶汽车在获得自动驾驶带来的便利的同时,会希望自身的生命财产得到安全保障。但是,只要乘坐自动驾驶汽车,就会面临无法预料的风险,这种风险是乘客在乘坐自动驾驶汽车时予以默认和接受的。由这样的语境,可以得出意义4,即相对于乘客而言,自动驾驶交通事故责任是其为获得特定的便利条件而不得不接受的负担或付出。
语境5及相应的意义5:行人在行进的过程中,都希望自身的生命财产是一直安全的,不希望遇到任何的危险。然而,只要生活在地球上,风险就是避免不了的。道路上的行人时刻有可能面临着来自自动驾驶交通事故造成的伤害。由这样的语境,可以得出意义5,即相对于行人而言,自动驾驶交通事故责任是其在没有获得利益时却要额外遭遇的主观上避免不了的风险和负担。
语境6及相应的意义6:作为政府,需要引导包括自动驾驶在内的科学技术事业的发展。在发展自动驾驶事业的同时,既要为生产商提供良好的营商环境,也要保障人民群众的生命财产安全。由这样的语境,可以得出意义6,即相对于政府而言,自动驾驶交通事故责任是其工作内容的题中之义和必要构成。
综上所述,作为人类社会中诸善之一的自动驾驶交通事故责任在面对着不同的社会语境——包括宏观上因其区分于其他善而形成的社会语境和微观上因其面对不同的主体而生成的社会语境时——会拥有不同的社会意义。
四、 不同“社会意义”决定的事故责任的差异化分配原则
善的社会意义决定善的分配原则。由于拥有不同的社会意义,自动驾驶交通事故责任的正义分配自然拥有不同的分配原则。如前所述,自动驾驶交通事故责任分别在宏观上因与其他的善所处的社会语境相区分而表现出不同的社会意义,在微观上因面对不同的主体及其生成的不同社会语境而表现出不同的社会意义,因此,自动驾驶交通事故责任的分配由两个层次上不同的社会意义所决定的分配原则所构成,分别将这两个原则称为第一原则和第二原则。在理念和作用上,第一原则统领第二原则,第二原则在第一原则的支持下发挥着作用。
1. 面向宏观语境的社会意义决定的第一分配原则
首先来分析第一分配原则。对于第一分配原则的推导,还是回到自动驾驶交通事故责任的社会意义上。由于自动驾驶交通事故责任与手动驾驶交通事故责任等善拥有不同的社会意义,自动驾驶交通事故责任就与手动驾驶交通事故责任等善的分配原则不一样。如前所述,对于人类命运共同体来说,自动驾驶交通事故责任的社会意义不是别的,而正是通过对人进行协调性的心理触动和整合性的利益调适,进而促进人与人之间、人与机(自动驾驶)之间更好地融合发展。这样的社会意义决定了,自动驾驶交通事故责任的分配需要恪守两点原则。
第一,不能采用过严的制裁性原则, 而宜采用适度的宽容性原则——采用过严的制裁性原则会打击自动驾驶生产商的积极性和创造力, 不利于自动驾驶事业的发展和社会的进步。 第二,不能采用单一的事后追究的原则, 而宜采用事前警示与事后追究相结合的原则——单一的事后追究原则起不到更好地预防自动驾驶交通事故的作用。 第一原则的两个方面在自动驾驶交通事故责任分配中发挥引领作用, 是自动驾驶交通事故责任分配需要坚持的一个统领性的原则。 它或许比较抽象, 但却能够在具体的分配实践中落地和执行。
2. 面向微观语境的社会意义决定的第二分配原则
在分析完第一分配原则之后,再来分析第二分配原则。第二原则事实上并不是一个单行原则,而是一个系统性原则,它由六个分支内容构成,包括自动驾驶交通事故责任面对的六个主体生成的不同社会意义所决定的分配原则。依照前述的六个主体的顺序,对第二原则的构成进行分析。
(1) 对称性分配原则。 对于自动驾驶系统来说, 自动驾驶交通事故责任的社会意义是, 自动驾驶交通事故责任是自动驾驶系统特定行为导致的后果。 如果没有自动驾驶特定的行为发生, 交通事故就不会产生。 自动驾驶系统理应为自己的特定行为买单。 因此,自动驾驶交通事故责任应该采用对称性原则分配给自动驾驶系统。 所谓对称性分配原则, 就是指自动驾驶系统对于引起特定的事故发挥了多大的作用, 就应该承担与之相对应的责任, 既不可以多一点, 也不可以少一点。
(2) 恰适性分配原则。对于生产商来说,自动驾驶交通事故责任的社会意义是,自动驾驶交通事故责任是类似于生产成本的一种隐性社会成本。既然是一种成本,那就意味着会亏损。当自动驾驶发生交通事故时,这个隐性社会成本就会转变为显性社会成本。对于生产商来说,成本当然是越低越好,但又不可能低到不存在。因此,自动驾驶交通事故责任应该采用恰适性原则分配给生产商。所谓恰适性分配原则,就是根据生产商自身的实际承担风险能力,分配分量合适的即不会对生产商实现持续生产构成较大威胁的责任给生产商。
(3) 还原性分配原则。 对于汽车所有人来说,自动驾驶交通事故责任的社会意义是, 自动驾驶交通事故责任是其必须认领的自我附属性损失。 既然对自动驾驶汽车拥有所有权, 那么, 汽车所有人就需要对自动驾驶汽车的行为负责, 进而需要对自动驾驶汽车因其特定的行为而产生的特定后果负责。换言之, 自动驾驶汽车的行为产生什么样的后果, 汽车所有人就需要承担什么样的后果。 这就好比一个人养了一只小动物, 小动物给别人造成伤害后, 小动物的主人应该对小动物伤害人的事件负责任。 因此, 自动驾驶交通事故责任应该采用还原性原则分配给汽车所有人。 所谓还原性分配原则, 就是将自动驾驶系统需要承担的责任完整地转移给汽车所有人, 由汽车所有人来代替自动驾驶系统承担相应的事故责任。
(4) 共担性分配原则。对于乘客来说,自动驾驶交通事故责任是其为获得特定的便利条件而不得不接受的负担和风险。不乘坐自动驾驶汽车,乘客自然就不会与自动驾驶交通事故责任产生直接的联系。选择乘坐自动驾驶汽车,乘客就与自动驾驶汽车形成了一个利益和命运共同体,需要与自动驾驶汽车共同面对可能发生的各种事故和风险。利益与风险同在,因此,自动驾驶交通事故责任应该采用共担性分配原则分配给乘客。所谓共担性分配原则,就是将自动驾驶交通事故责任分配一部分给乘客,至于分配多少责任由乘客的数量来决定。
(5) 包容性分配原则。对于行人而言,自动驾驶交通事故责任是其在没有获得利益时却要额外遭遇的主观上避免不了的风险和负担。既没有获利,还要承担风险与负担,这对于行人来说是非常不公平的。然而,一项崭新的社会事业要实现快速发展,在很大程度上是需要社会大众给予一定的支持并分担风险的。既然如此,自动驾驶交通事故责任应该采用包容性分配原则分配给行人。所谓包容性分配原则,就是让行人对自动驾驶产生同情和理解,从而自愿地象征性承担一点自动驾驶交通事故责任。行人分担责任具有特殊的意义,适当分配即可。
(6) 兜底性分配原则。对于政府来说,自动驾驶交通事故责任是其工作内容的题中之义。政府存在的一个重要目的就是为社会的发展保驾护航,为社会发展过程中存在的一些困难和产生的复杂问题进行兜底。自动驾驶交通事故责任虽然与政府不存在直接关系,但却是政府躲不开、绕不过的。换言之,自动驾驶交通事故责任是政府必须承担的。因此,自动驾驶交通事故责任应该采用兜底性原则分配给政府。所谓兜底性分配原则,一方面是指在分配自动驾驶交通事故责任时,政府的格局要大,起到带头担当的作用;另一方面是指对于自动驾驶交通事故责任分配中其他主体难以承担即分配不完的剩余责任,政府要主动认领。
五、 差异化分配原则下自动驾驶交通事故责任的分配机制
正义分配原则确立后,接下来就是按照原则对自动驾驶交通事故责任进行分配。然而,正义分配原则只是为具体的分配实践提供了一种抽象的价值指引,如何按照抽象的价值指引对自动驾驶交通事故责任进行分配并不容易。
在自动驾驶交通事故责任分配中,六个主体地位平等,也缺乏一个能够拥有完全公正性和理性能力的裁决力量。换言之,没有一个超越所有主体并能够按照六个分支原则来对自动驾驶交通事故责任进行公正分配的主体。由此,在差异化原则下建立自动驾驶交通事故责任的分配机制至关重要。
1. 成立分配共同体
自动驾驶交通事故责任的分配机制首先需要成立一个分配共同体。自动驾驶交通事故责任相当于一个完整的蛋糕摆在六个主体面前,分配交通事故责任实质上就是切蛋糕。切蛋糕关乎每一个主体的切身利益,只有每个主体都在场,才能保证分配的公平公正。然而,由于六个主体中的部分主体(如乘客、行人)涉及到的人数较多,而在分配时又不可能让每一个乘客和行人都参与其中,这就需要从乘客和行人当中选取合适的代表来代表乘客和行人参与到分配共同体当中[38]。
另外,作为六个主体之一的自动驾驶系统并不像其他五个主体一样拥有话语表达能力和理性辩论能力,这就导致自动驾驶系统无法作为一个独立的主体参与到自动驾驶交通事故责任的分配共同体中,而是需要由其他的主体来代表(在人工智能发展到高级阶段后,如果机器人能够像人一样进行正常思考和话语表达,自动驾驶系统可以直接参与)。然而,由于生产商只是设计和生产了自动驾驶系统却不对自动驾驶系统拥有所有权,而汽车所有人对自动驾驶系统拥有所有权却没有设计和生产自动驾驶系统,这又使得生产商和汽车所有人都不能作为自动驾驶系统的合适代表参与到分配共同体当中。那么,在六个主体之外选择和确认一个合适的主体来代表自动驾驶系统参与分配共同体就是唯一的选择。由于自动驾驶是一个非常专业的问题,作出与自动驾驶相关的判定离不开自动驾驶相关领域的专家,因此,从事自动驾驶相关领域研究的专家无疑是合适的人选。
2. 以协商执行原则
由六个主体即代表自动驾驶系统的专家、生产商、汽车所有人、乘客、行人、政府等,组成的自动驾驶交通事故责任分配共同体,必须严格按照由第一原则和第二原则组成的分配原则来对自动驾驶交通事故责任进行分配。
由于第一原则是总体性原则,并不会对六个主体的利益构成偏向性的影响。因此,对于第一原则,分配共同体只需要明确其中的要义。其要义是,第一原则是对自动驾驶交通事故责任进行分配时需要坚持的价值主线。尽管自动驾驶交通事故责任的分配会面对六个不同的主体,但在向六个主体分配责任时都应该恪守这一原则。具体来说,对于自动驾驶交通事故只要不是六个主体主观刻意造成的,在向六个主体分配事故责任时,尽可能不进行制裁而是宽容对待。即使六个主体中个别或部分主体的主观刻意行为造成了自动驾驶交通事故发生,也不能对其进行严厉制裁,而是多给予悔过自新的机会。此外,向六个主体分配自动驾驶交通事故责任,主要也是进行事前警示,提醒各个主体各尽其责,共同为自动驾驶发展作出贡献。
构成第二原则的六个分支原则与各个相关主体的利益密切相关。运用每个原则对自动驾驶交通事故责任进行分配会直接影响相关主体的利益,因此,在运用六个分支原则对事故责任进行分配时,每个主体都需要发表自己的观点。在此,以六个分支原则中的对称性分配原则为例。对于自动驾驶系统来说,是按照对称性分配原则来分配责任给自动驾驶系统。那么,分配多少责任才与自动驾驶系统应当承担的责任是相对称的,对此,分配共同体中代表自动驾驶系统的专家可以首先进行陈述,其他主体则表达各自的看法。按照对称性分配原则,既不会完全采纳专家的意见和建议,也不会完全听从其他主体的意见和建议,而是综合六个主体的意见和建议,运用投票表决形成共识,并作为对称性分配原则的执行指令。
当运用其他五个分配原则即恰适性分配原则、还原性分配原则、共担性分配原则、包容性分配原则、兜底性分配原则,进行自动驾驶交通事故责任分配时,同样需要六个主体共同讨论,从而形成共识即分配执行指令。
需要指出的是,兜底性分配原则实质上不需要六个主体进行过多的讨论。当分配共同体围绕其他五个原则进行充分的讨论进而将相应的责任分配给五个主体之后,剩下的责任都需要由政府来认领和承担。这也是兜底性分配原则的本意和初衷。但是,这并不意味着政府要对自动驾驶交通事故责任进行大包大揽。对于能够运用五个原则分配好的责任,政府没必要予以承担。
六、 结 论
自动驾驶的发展既给人类社会带来便利,也给人们对自动驾驶交通事故责任的正义分配带来难题。一些发达国家围绕自动驾驶交通事故责任的认定进行了一些立法上的探索,学术界聚焦于自动驾驶交通事故责任的正义分配并开展了一些理论上的探讨,取得了一些成果,但并没有为自动驾驶交通事故责任的正义分配提供一个统领性的框架。本文在吸收既有研究成果的基础上,借鉴语境主义正义论的理论资源对自动驾驶交通事故责任分配问题进行了较为深入的研究。
根据语境主义正义论,作为社会诸善之一的自动驾驶交通事故责任会面临不同的社会语境,不同的社会语境会赋予自动驾驶交通事故责任不同的社会意义,不同的社会意义又决定了自动驾驶交通事故责任会形成差异化分配原则,即由第一原则和第二原则共同构成,第一原则统领第二原则。第一原则表现为,在分配自动驾驶交通事故责任的过程中,不能采用过严的制裁性原则,而宜采用适度的宽容性原则;不能采用单一的事后追究的原则,而宜采用事前警示与事后追究相结合的原则。第二原则包括针对自动驾驶系统的对称性分配原则、针对生产商的恰适性分配原则、针对汽车所有人的还原性分配原则、针对乘客的共担性分配原则、针对行人的包容性分配原则、针对政府的兜底性分配原则。在差异化原则的引导下,由代表自动驾驶系统的专家、生产商、汽车所有人、乘客、行人、政府等组成自动驾驶交通事故责任分配共同体进行充分的讨论,从而形成面向各个主体的分配共识和执行指令,进而实现自动驾驶交通事故责任的正义分配。
本文从语境主义的视角为自动驾驶交通事故责任分配构建了一个整体性的正义理论框架,这是一种理论创新。相对于既有研究所提供的各种事故责任的认定方法,按照本文的正义理论框架所展开的责任分配,事故所涉主体都能够得到公正的对待,事故责任能够得到相对公平的分配,既不会影响相关主体乃至整个社会对责任的正义分配秩序的信任,也不会影响自动驾驶事业的发展。总的来说,本文所开展的研究为自动驾驶交通事故责任的分配提供了一个新思路。
