浅谈钳工锤凹陷痕迹三维图像处理方法
2024-02-01隋文浩王载方
隋文浩,王载方
(中国刑事警察学院,辽宁 沈阳 110854)
随着三维共聚焦显微、白光干涉扫描、超景深三维立体显微技术等三维微观形貌采集技术的发展,三维图像的获取变得越来越容易。目前工具痕迹鉴定领域已有大量痕迹识别与鉴定工作在三维图像的基础上展开,可记录痕迹上各点空间位置信息的三维图像与工具痕迹主要研究对象的立体性特征不谋而合,使用三维形貌采集技术采集工具痕迹的三维图像基本实现了痕迹特征的数字化保存。
凹陷痕迹的二维图像存在分辨率较差、过于依赖合适的打光角度等问题,而三维图像直接提取了凹陷痕迹各点的深度信息,经过处理的三维图像可用于找到更多的鉴定可用特征,也可直接用于检材与样本痕迹的机器比对,相比二维图像具有更广阔的应用前景。
1 凹陷痕迹点云数据获取
1.1 凹陷痕迹制备
为获得具有重复性、标准的凹陷痕迹,设计制作了打击装置如图1,以两个长直导轨限制中间滑块水平自由度,滑块中间可固定锤具,底部使用可调平台承载承痕体以控制打击方向。装置最快落锤速度为3.5m/s,中间滑块总重1.5kg。
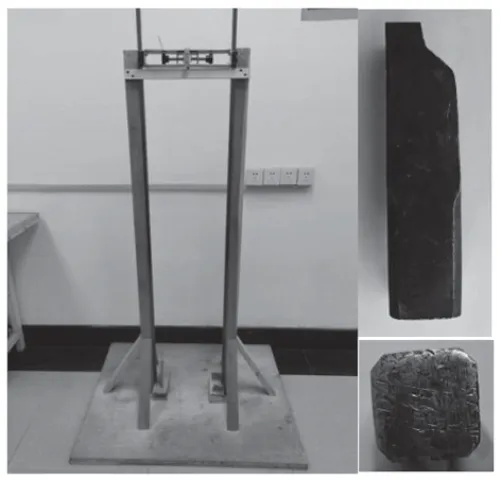
图1 标准打击装置
以99.994%纯度铅50×50×15mm为承痕体,使用德国Optronis公司CP70-2-M/C-1000型号高速相机,拍摄了人使用钳工锤打击铅块的过程,逐帧计算出打击速度为8.5m/s,并读取打击角度14.9°。同时使用该装置在3.5m/s打击速度下,在相同打击角度15°下,制备获得凹陷痕迹。
1.2 三维图像数据采集
使用奥地利alicona公司IFM G4自动变焦三维表面测量仪,在相同条件下对以上两个样本进行形貌采集。为降低图像处理阶段的计算量,采集中尽可能人工调整承痕客体在拍摄云台上的相同位置,进而使用相同拍摄路径对两个凹陷痕迹进行采集。并导出相应痕迹的三维形貌坐标数据文本文件,拍摄参数设置见表1。

表1 拍摄参数设置
对不同打击方式测得的三维形貌坐标数据作图如图2。
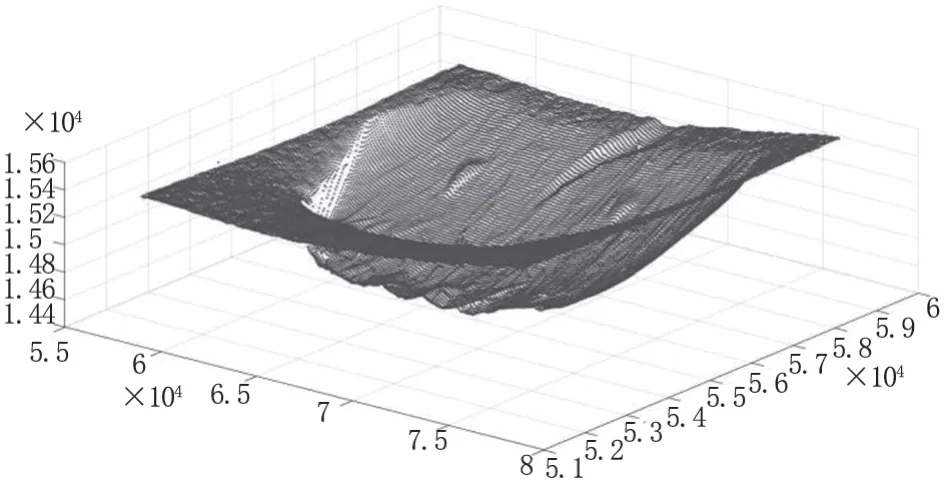
图2 原始空间坐标图像
2 三维图像处理
采用本实验室三维形貌测量仪采集到的图像其深度信息具有单值的特点,即每个采样点在空间坐标系中,不同(x,y)值对应了唯一的深度数值。使用matlab编写程序对深度图像进行处理时可仅对图像中的深度信息进行。
2.1 点云的补全与数学化表达
使用三维形貌测量仪采集到钳工锤打击痕迹的一组3×n形式的原始点云数据:
该三维形貌测量仪采集图像可能存在的缺陷:倾斜角超过80°的表面无法采集;光照强度过低或过高导致的缺失点;系统性采集缺失点。因此,在生成目标深度矩阵的同时可采用遍历算法将缺失点一并补全。最终获得深度矩阵如B:

图3 遍历补全图像算法流程图
2.2 滤波平滑图像
经补全后的图像中包含采集时系统噪声、采用最近临点赋值空缺点所引入的人工噪声以及凹陷痕迹中承痕客体自身粗糙度引入的噪声,故采用中值滤波对图像进行平滑处理,以去除干扰观察或机器比对的影响因素。
最终获得图像如图4。
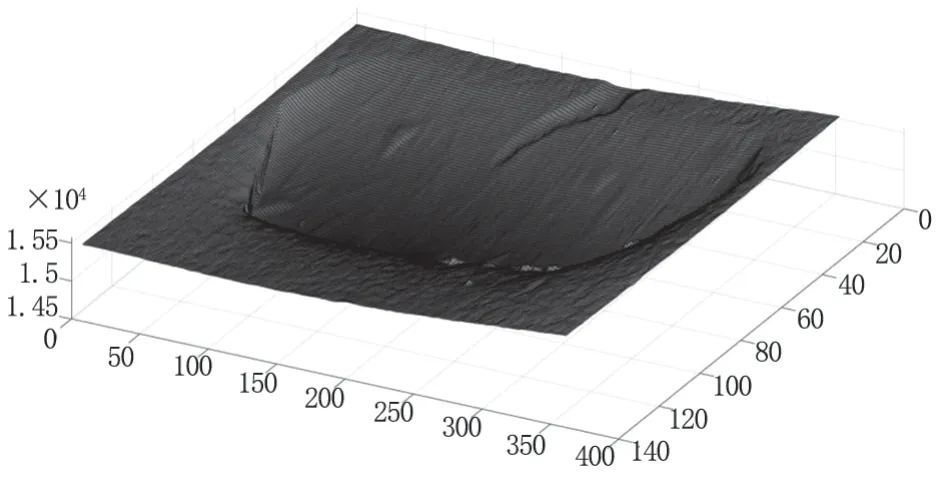
图4 处理后图像
2.3 点云位姿配准
为更好地使用本研究中所采集的凹陷痕迹三维图像,需要对相同打击条件下的三维图像进行刚性平、转动配准。
将导出的深度坐标点数据转化为点云,使用相干点漂移(CPD)算法实现点云配准,得到配准变换矩阵。在输出变换矩阵的同时,返回与不动点云配准后的转换后的点云,对配准后两点云作图如图5。此时,两组点云空间距离相近,已具备利用互相关测度计算相似度的条件。将配准后点云深度坐标重新返回矩阵B。

图5 配准后点云
3 互相关测度痕迹相似度
在计算三维数据间相似度时,多采用互相关测度,互相关测度能够很直观地反映两组间的相似程度。设人工手动打击的深度矩阵B1(x,y)与使用标准痕迹打击所形成的深度矩阵B2(x,y),对二者进行互相关测度计算,则互相关测度值可用公式(1)计算得出:
最终计算出两组数据相似度为0.648。
4 结语
(1)使用本文中的方法可有效处理凹陷类痕迹的三维图像,并进行简单的机器比对。
(2)本文使用高速相机拍摄下人使用钳工锤等锤具时的过程,得到相应凹陷痕迹三维数据,并与标准打击痕迹生成装置所生成的条件相似的凹陷痕迹三维数据进行了互相关测度计算。最终得到相似度较低,其原因分析为人手在进行锤具的打击时接触后瞬时速度较大,装置打击的瞬时速度较小,该问题是目前装置所难以实现的,但本文给出了该种比对方式的可行流程,在装置加入其他动力的情况下,应当可以按照本论文流程给出较高相似测度。
