电动垂直起降飞行器气动布局分析(五)
2024-01-31符长青
符长青
固定翼无人机气动布局类型
对固定翼无人机的空气动力展开分析,我们可以发现,整架固定翼无人机受到的空气动力就是外部件受到的空气动力之和,升力主要由机翼提供,所有外部件都会产生阻力。
无人机气动布局的概念与总体结构布局的概念截然不同。固定翼无人机总体空气动力形态布局称作气动布局,是指机翼、尾翼等翼面如何布置在机体上而成为一个整体。气动布局与无人机外形构造、动态特性及其所受的空气动力密切相关,关系到无人机的飞行特征及飞行性能,尤其对无人机飞行中的平衡性、稳定性、操纵性和机动性起到关键作用。而固定翼无人机的动力装置、机载设备、外挂任务载荷等设备的布置,则称为固定翼无人机总体结构布局。
固定翼无人机任务需求不同,其总体结构设计和飞行性能要求也不同。因此,气动布局形态各异,别具特色。现代固定翼无人机气动布局包括很多类型,其中最常见、可作为复合无人机基础气动布局的类型有五种:常规气动布局、飞翼气动布局、鸭翼气动布局、串列翼气动布局和三重翼气动布局,如图1所示,这些气动布局都有各自的特殊性及优缺点。气动布局选用是一个综合考虑、仔细分析和折衷处理的过程。
常规气动布局
自从莱特兄弟发明第一架固定翼飞机以来,飞机设计师们通常将固定翼飞机的水平尾翼和垂直尾翼放在机翼后面的机身尾部。这种气动布局一直沿用到现在,是现代固定翼有人机和固定翼无人机最常用的气动布局,被称为常规气动布局。它技术最成熟,理论研究已经非常完善,生产技术成熟而稳定。与采用其他类型气动布局的飞机相比,采用常规气动布局的飞机的各项性能比较均衡,但仅仅是均衡,没有特别出色的地方。

飞翼气动布局
飞翼气动布局也称无尾气动布局,与常规气动布局相比,其型阻可减小60%以上,改善了维修性。飞翼无人机只有机翼,没有水平尾翼和垂直尾翼,其雷达反射波很弱、气动效率高、空机重量轻、升阻比大、隐身性能好、结构简单、全生命周期成本低,但机动性差、操纵效能低。如果无人机无垂尾,航向存在静不稳定问题,推力矢量技术可解决此问题。
飞翼无人机左右两侧各有一个副翼,每个副翼由上下两片翼面组合而成。两片翼面可以分别向上或向下偏转,也可以合起来同时向上或向下偏转。当无人机需要转向时,一侧副翼的两片翼面张开,产生的阻力增加,无人机得到偏转的力。如果无人机两侧副翼翼面张开相同的角度,产生的阻力均增加,起到减速板的作用。如果副翼上下两片翼面一起偏转,一侧副翼的两片翼面向上偏转,另一侧副翼的两片翼面向下偏转,能使无人机倾斜。如果左右两侧副翼同时向上或向下偏转,则发挥升降舵的作用。这种多功能舵面由左右两个副翼构成,主要保持或改变无人机的航向,所以又被称为阻力方向舵。
鸭翼气动布局
鸭翼气动布局是指常规布局中的水平尾翼位于主翼前方。因此,鸭翼气动布局没有水平尾翼,好处是前翼的较小翼面可实现同样的操纵效能。而且前翼和主翼可以同时产生升力,而不像水平尾翼那样,平衡俯仰力矩时多数情况下会产生负升力。在大迎角状态下,前翼只需减小产生的升力,即产生低头力矩,从而有效保证大迎角下抑制过度抬头。
在同等条件下,采用鸭翼气动布局的无人机较采用常规气动布局的无人机具有更好的机动性。当无人机需要完成上仰、小半径盘旋等高强度机动动作时,鸭翼无人机前翼和主翼的翼面都会产生强大的涡流,两股涡流相互偶合,相互增强,产生比固定翼无人机更强的升力。鸭翼无人机因有前翼而不易失速,有利于保证飞行安全。缺点是,起降性能不好,在大迎角下,诱导阻力较大,鸭翼无人机失速早于非鸭翼无人机。
串列翼气动布局
串列翼气动布局包含前后两个固定机翼。相比于鸭翼气动布局,串联翼气动布局的前翼面积较大。

采用串列翼氣动布局的无人机在合理布置两个固定机翼相对于重心上下位置的情况下,其前后机翼的上下反角差既能有效改善前翼翼尖涡流对后翼气动特性产生的不利诱导效应,又可以改善双翼面布局的整体气动特性,使得串列翼无人机的升阻比超过常规单翼面布局的无人机,提高了无人机气动效率。
串列翼构型的最大优点是,机翼翼展小,刚度好,诱导阻力小,机翼结构也因升力均摊和机翼整体结构高度、宽度的增加而更易于设计。缺点是,前后两个机翼之间会出现相互干扰,如前翼下洗气流的作用会对后翼气动特性产生影响,后翼同样会对前翼气动特性产生影响。前后两个机翼之间的相互干扰作用因两翼之间的水平距离、垂直距离,两翼之间的翼差角度不同而不同。
三重翼气动布局
在常规气动布局的基础上,三重翼气动布局增加了一个水平前翼,即拥有前翼、主翼和水平尾翼。与鸭翼气动布局不同的是,三重翼气动布局的前翼不能转动,只能产生涡流。三重翼气动布局综合了常规和鸭翼两种气动布局的优点,不仅能得到更好的气动特性,还可进一步提高飞行性能。三重翼无人机与具有相同外形尺寸的固定翼无人机、鸭翼无人机相比,其最大起飞重量大幅增加,增加了约50%,操纵效能高,配平阻力小,迎角特性佳,可以提高飞行安全性,以及大大改善无人机起降性能。缺点在于增加的前翼会使零升阻力和空机重量增加,高速和小迎角下的阻力比固定翼无人机大,稳定性变化幅度较大。
复合无人机总体结构组成
复合无人机是固定翼无人机加装升力旋翼系统后构成的一种复合结构体。它能够以旋翼无人机模式垂直起降,又能以固定翼无人机具有的较高飞行速度进行巡航。
固定翼无人机是复合无人机的基础,当其常规气动布局、飞翼气动布局、鸭翼气动布局、串列翼气动布局和三重翼气动布局增加旋翼系统后,将形成多种不同的构型。比较常见的构型有五种:固定翼旋翼构型、倾转旋翼构型、倾转机翼构型、单旋翼构型和倾转电动涵道喷气发动机构型。这些构型所使用的升力旋翼系统也有多种类型,如开放螺旋桨、涵道风扇、开放螺旋桨加涵道风扇、倾转电动涵道喷气发动机。而涵道风扇包括全涵道、半涵道和自适应涵道风扇等多种结构型式。其中,半涵道分为上半涵道和下半涵道两种不同类型。如此多的气动布局排列组合所形成的构型与燃油发动机、电动机、氢动力系统、油电混合发动机等不同动力装置组合,必然会形成一个庞大的复合无人机家族。由此可见,复合无人机的各种总体结构类型必然会如春天里一个巨大花园中的鲜花一样,百花盛开、争奇斗艳、万紫千红。

现以固定翼无人机加装多个固定旋翼系统所构成的复合无人机(见图7)为例,阐述复合无人机的总体结构。本例复合无人机总体结构由机翼、机身、尾翼、起降装置、发动机、电动机、推力螺旋桨和升力螺旋桨等部件组成。其中,推力螺旋桨安装在机身尾部,其位置固定不变。除了加装的4副升力螺旋桨和4台电动机以外,复合无人机的其余主要部件与固定翼无人机相同。换言之,复合无人机就是固定翼无人机加装旋翼系统或倾转电动涵道喷气发动机系统后,才具有垂直起降和悬停能力。
空气螺旋桨有开放螺旋桨、涵道风扇两种类型。升力螺旋桨和推力螺旋桨都是空气螺旋桨,两者的工作原理、整体结构和气动特性等要素均相同。唯一区别是,当两种螺旋桨旋转工作时,旋转平面与地平面之间的相对角度不同。升力螺旋桨的作用是为无人机提供升力,以克服无人机受到的重力,确保无人机能够向上飞行或在空中悬停,升力螺旋桨的旋转平面基本上是水平的。推力螺旋桨安装在无人机机身尾部,拉力螺旋桨安装在无人机机身最前端,两者分别为无人机提供前飞的推力和拉力,以克服无人机向前飞行的空气阻力,确保无人机向前飞行,两者的旋转平面基本是垂直的。
复合无人机飞行原理
复合无人机的飞行过程分为垂直起飞、上升过渡、巡航飞行,下降过渡、缓速下降、地效悬停降落六个阶段,如图8所示。
垂直起飞
全部升力螺旋桨和电动机启动,为复合无人机垂直起飞提供升力。此时,推力螺旋桨不工作,复合无人机具有旋翼无人机的飞行特性。
上升过渡
复合无人机依靠升力旋翼系统产生的升力,稳定悬停在特定高度,同时推力旋翼系统启动,产生前飞的推力。该阶段的飞行特性较为复杂,在开始前飞时,升力旋翼系统和固定翼共同为无人机提供升力。随着前飞速度的增加,升力螺旋桨逐步降低转速,减小升力负担比例,使升力负担逐步转移到固定机翼上。无人机前飞速度越快,固定机翼产生的升力越大,当前飞速度达到固定机翼可以产生前飞所需的全部升力时,即升力与重力平衡时,所有升力旋翼系统中的电动机关机,停止工作。复合无人机进入巡航阶段。
巡航
在巡航阶段,复合无人机具有固定翼无人机的主要特性,获得了固定翼无人机的优异飞行性能。固定机翼为复合无人机水平飞行提供全部升力,并承担全部最大起飞重量。
下降过渡
复合无人机逐渐降低前飞速度,同时升力旋翼系统中的所有电动机启动,升力螺旋桨为无人机提供向上的升力。随着前飞速度的降低,固定机翼产生的升力减小,升力螺旋桨增加转速,增大升力负担比例,使升力负担逐步转移到所有升力螺旋桨上。
缓速下降
在该阶段,推力螺旋桨停止工作,升力螺旋桨为无人机提供全部向上的升力。此时,复合无人机的垂直下降方式与典型多旋翼无人机垂直下降方式相同。
地效悬停着陆
地面效应是一种使飞行器诱导阻力减小的流体力学效应。相比于巡航阶段,复合无人机在地效悬停降落阶段能获得更高的升阻比。当复合无人机下降到距离地面很近(1~2m)悬停时,地面效应出现,升力会陡然增加。复合无人机利用地面效应,着陆前短暂悬停后再降落到地面,提高了着陆安全性。
从复合翼无人机飞行过程可知,在巡航阶段时,复合翼无人机最大起飞重量由固定翼全部承担。而多旋翼无人机在整个飞行过程中,旋翼系统承担全部或大部分最大起飞重量。
复合无人机气动布局的特点
为了设计出一种既具有固定翼无人机优异飞行特性,又能垂直起降的无人机,人们进行一系列理论研究与分析后,开始在实践中采取多种气动布局组合使用的方案,以融合固定翼无人机和旋翼无人机这两种不同构型的优点,使复合无人机既具有无人直升机的飞行特性,又具有固定翼无人机的飞行特性。
当旋翼轴处于垂直位置时,复合无人机类似于无人直升机,具有垂直起降、空中悬停、原地回转、侧飞、后飞和低空树梢高度飞行等能力,此时它的单位功率起飞重量接近典型无人直升机。当旋翼轴处于水平位置时,复合无人机相当于固定翼无人机,在巡航阶段实现高速飞行。
当然,任何事物并非完美无缺,都要一分为二。虽然复合无人机兼具了旋翼无人机和固定翼无人機的众多优点,但是其技术复杂度大于旋翼无人机技术与固定翼无人机技术之和。升力旋翼系统对复合无人机性能产生的影响主要有以下几方面。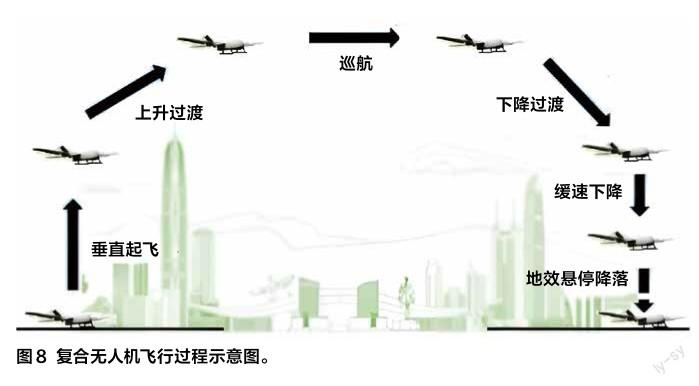
1.复合无人机的载重能力取决于升力旋翼系统所产生的升力大小。
2.升力旋翼系统的可靠性决定了复合无人机起降阶段的安全性。
3.在巡航阶段,升力旋翼系统的部件会增加飞行阻力。
4.与固定翼无人机相比,复合无人机具有飞行速度低、耗油量较大、航程较短等缺点。
5.与旋翼无人机相比,复合无人机的垂直起降、空中悬停性能,稳定性和安全性往往会略逊一筹,特别是由于受到固定翼系统结构尺寸的限制,升力旋翼直径比较小,影响气动效率和飞行效率。
6.倾转机翼会导致复合无人机的迎风面积增加,造成升力旋翼系统在工作时产生较大的阻力,导致结构重量增加。
7.在巡航阶段,升力旋翼系统的死重会降低复合无人机的飞行速度、续航能力和载重能力。
8.复合无人机的旋翼与固定翼、旋翼与机身、旋翼与尾翼、旋翼与动力装置等主要部件之间存在很强的非线性气动干扰,会对飞行稳定性和安全性产生较大影响。在设计研制过程中,技术人员需要采取措施减小这类干扰。
9.为了实现不同飞行阶段的功能,倾转旋翼无人机必须控制旋翼轴倾转,在过渡飞行阶段时,具有明显的张力矢量控制特性。各个通道之间存在强耦合,使倾转旋翼飞行控制技术成为一个关键难点。
现在,复合无人机获得了很多突破性进展,较无人直升机具有更高的飞行效率、更低的噪声水平、更快的飞行速度、更远的航程、更长的续航时间,而且克服了固定翼无人机不能垂直起降、悬停,以及需要机场跑道进行一定距离滑跑才能起降等缺点。
复合无人机发展速度之快是人们无法想象的,其应用已深入到社会诸多领域。值得一提的是,为了解决现代大城市地面交通拥堵越来越严重的问题,近年来人们非常重视诸如电动垂直起降(eVTOL)复合无人机方案设计、开发实践、应用拓展等工作,从而促进了复合无人机智能化水平不断提升,优势越来越明显,发展速度越来越快,应用范围越来越广。
傾转旋翼和倾转机翼两种构型的结构与性能对比
只要某种方式或机械装置改变了空气螺旋桨的旋转平面与地平面之间的夹角,那么,同一个空气螺旋桨既能在无人机垂直起降和悬停时扮演升力螺旋桨的角色,又能在无人机前飞时扮演推力或拉力螺旋桨的角色。基于这种构思,倾转旋翼和倾转机翼两种不同构型的设计方案应运而生。
实际上,在人类航空技术发展史上,倾转旋翼构型设计方案早已成功应用到基于固定翼有人机和直升机的复合有人机上。例如,美国贝尔公司和波音公司联合设计制造的V-22“鱼鹰”有人机采用了倾转旋翼构型设计方案。该机机翼固定不动,在起降和悬停时,安装在机翼两端的两副螺旋桨及发动机同时向上倾转,此时螺旋桨旋转平面与地面平行,作为升力螺旋桨。随着V-22“鱼鹰”进入平飞状态,安装在机翼两端的两副螺旋桨及发动机又逐步向下倾转,恢复原位,此时螺旋桨旋转平面与地面垂直,变成拉力螺旋桨。
V-22具备直升机的垂直升降能力,也拥有固定翼飞机飞行速度较快、航程较远、耗油量较低的优点。在图9中,V-22自动完成了从垂直起飞到水平飞行的姿态转换。巡航过程中, V-22在超过70%的时间里采用固定翼飞机模式飞行,最大飞行速度可达650km/h。
相较于倾转旋翼构型设计方案,倾转机翼构型设计方案是螺旋桨安装在机翼上,当螺旋桨需要倾转时,整个机翼连同螺旋桨一起倾转。
在V-22问世之前,美国已经研制出倾转机翼有人运输机XC-142,详见图10。该型运输机于1964年9月首飞,安装了4台T64-GE-1型发动机,机组人员为2名,最大起飞重量20t。它的主翼和水平尾翼均能倾转,一副旋翼安装在机尾,以保证机身的整体平衡。
为实现垂直起降,复合无人机经常选用倾转旋翼和倾转机翼两种构型。相比于倾转旋翼构型,倾转机翼构型具有以下优势和劣势。
优势
1.在垂直起降、空中悬停时,倾转机翼构型的旋翼下洗气流不会被处于水平状态的机翼所拦截,减小了升力损失。
2.在飞行过渡阶段,倾转机翼无人机的飞行过程比倾转旋翼无人机短。
3.倾转机翼无人机只需一套倾转机构即可完成全部旋翼的倾转,而倾转旋翼无人机的每个旋翼系统分别需要一套独立的倾转机构。由此可见,倾转机翼无人机倾转机构的复杂度低于倾转旋翼无人机。
劣势
1.由于机翼面积大,在悬停时,倾转机翼无人机对气流具有较高敏感性。
2.倾转机翼构型安装有多个旋翼系统,需要承载尺寸更大的倾转机构才能完成倾转。
3.倾转机翼无人机的悬停效率、升力效率比倾转旋翼无人机低,因此倾转机翼无人机的单位功率有效载重小。
4.倾转机翼构型的噪声比倾转旋翼构型大。
电动垂直起降飞行器常规气动布局分析
为了得到一种飞行速度更快、飞行高度更高、任务载荷重量更重、节能省电的电动垂直起降飞行器,人们绞尽脑汁,在不同气动布局的固定翼无人机上,加装多个旋翼系统,设计出多种不同构型的电动垂直起降飞行器。
电动垂直起降飞行器常规气动布局的定义是:具有常规气动布局的固定翼无人机加装了多个由电动机驱动的升力旋翼系统,以及适合人员乘坐的座舱、座椅和相关设备。
在目前全世界开发的几百种电动垂直起降飞行器设计方案中,大多数设计方案(约占设计方案总数的60%)采用了常规气动布局。主要原因是,在航空器发展史上,固定翼有人机和固定翼无人机的常规气动布局是一种久经历史考验的布局。几代人的充分研究和大量实践给现在的电动垂直起降飞行器常规气动布局设计奠定了坚实基础。论文和书籍分享了大量有关固定翼无人机,无人机空气动力、操纵品质、总体结构设计和负载特性的研究和讨论。因此,在采用常规气动布局的电动垂直起降飞行器设计和研制过程中,人们可以借鉴较多的历史实践经验和理论著作。这是一个非常难得的有利条件,值得珍惜和利用。
电动垂直起降飞行器采用常规气动布局时,需要考虑升力旋翼系统尾流对固定翼气动特性的影响及其电动机对周围气流的加速作用。采用常规气动布局的电动垂直起降飞行器有固定翼旋翼、倾转旋翼、倾转机翼和单旋翼四种构型。其中,固定翼旋翼构型采用了两种相互独立的旋翼系统即升力旋翼系统和推力旋翼系统,向上的升力与向前的推力基本解耦,因此在姿态转换阶段具有较好的稳定性和操纵性。倾转旋翼和倾转机翼两种构型需要考虑机翼与旋翼之间、旋翼与旋翼之间互相产生影响等众多因素。因为非线型更强,所以配平难度更大的单旋翼构型与直升机相比,既没有解决单点失效的安全性问题,也没有解决旋翼带来的噪声问题,因此在行业中颇为受冷。
总之,与采用非常规气动布局的电动垂直起降飞行器相比,采用常规气动布局的电动垂直起降飞行器具有较高的气动效率,良好的稳定性和操纵性,可以提高安全性和可靠性。缺点是其重心布置的灵活性较低,乘客和货物在电动垂直起降飞行器机身内的移动会受到限制,而且机载设备布置的自由度较低。
采用常规气动布局的电动垂直起降飞行器案例
S4电动垂直起降飞行器
乔比航空公司(Joby Aviation)是一家由美國风险资本投资的初创企业,成立于2009年,总部位于美国加利福尼亚州圣克鲁斯市,拥有扎实的技术实力和非凡的产品开发策略。2018年,乔比航空公司自主研制的S4电动垂直起降飞行器进行了第一次试飞,飞行时间为15min。在起飞和降落时,S4电动垂直起降飞行器的噪声比直升机低很多,是目前能满足城市空中交通噪声水平低于88dB的电动垂直起降飞行器之一。
历经十多年研发和多次重大技术迭代,S4电动垂直起降飞行器计划在大规模生产时,最终实现机上无驾驶员飞行,即全自主飞行,未来有可能在城市空中交通(UAM)领域率先实现商业化运营。
1.设计特点
S4电动垂直起降飞行器采用常规气动布局设计,是一种倾转旋翼飞行器,不过它的固定翼有一个与大多数后掠翼设计方案不同的显著特点,即采用了前掠翼设计方案。这种前掠翼设计方案可解决电动垂直起降飞行器推力中心与重心之间不重合而产生的小扭矩问题。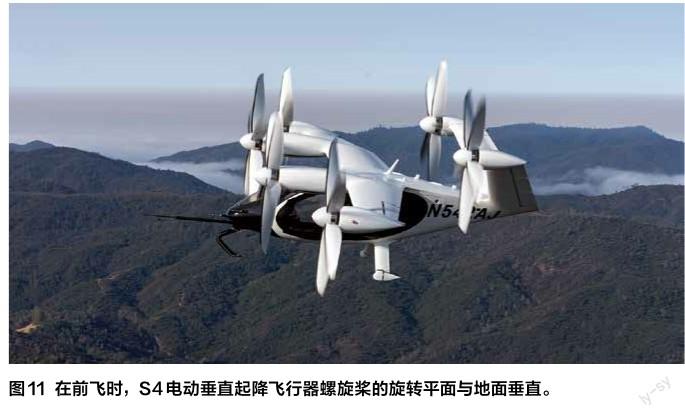

该机装配了6副可倾转高强度螺旋桨,因此可以像多旋翼无人机那样进行垂直起降和空中悬停。4副可倾转螺旋桨安装在固定翼上,其中,2副位于机翼中部,当螺旋桨倾转时,电动机舱固定不动,一个连杆机构带动螺旋桨倾转;另外2副位于机翼翼尖,螺旋桨及整个电动机舱一起倾转。机身尾部的V形尾翼顶端安装了2副可倾转螺旋桨,螺旋桨及整个电动机舱一起倾转。每副螺旋桨桨距都是可变的,其直径达2.9m,拥有5片桨叶,每片桨叶的桨尖均向下内翻一个角度,构成反面翼尖。研究显示,采用反面翼尖后,S4电动垂直起降飞行器具有更好的悬停性能,在巡航阶段也具有更高的飞行效率,同时能显著降低噪声。每副螺旋桨由两台额定功率为70kW/台的电动机驱动,为螺旋桨工作提供一层冗余。
S4电动垂直起降飞行器能够在仪表或可视飞行规则下飞行,采用了前三点轮式可伸缩起落架,拥有一个可供乘客观赏壮观景色的大窗户,机身使用了大量复合材料。
2.技术数据
S4电动垂直起降飞行器机长6.4m,翼展11.6m,最大起飞重量 2171kg,乘员5人(4名乘客和1名驾驶员),最大航程278km,巡航速度242km/h。动力装置为分布式电推进(DEP)系统,使用锂镍钴锰氧化物电池,该电池占最大起飞重量的35%,即电池组重量达到760kg,动力系统占最大起飞重量的19%,负载占最大起飞重量的21%,其他所有部件重量占最大起飞重量费25%。目前,世界上质量最好的动力电池能量密度为170Wh/kg左右。而乔比航空公司电池组的能量密度为235Wh/kg,这是该公司取得的一个非同寻常的巨大成就。
波音公司研制的电动垂直起降飞行器
波音公司总部设在美国华盛顿州西雅图市,是世界著名的飞机制造商之一。极光飞行科学公司(Aurora)是波音公司的子公司,成功开发了一种新型双座电动垂直起降飞行器,名为PAV,如图12所示。
PAV电动垂直起降飞行器于2019年在美国弗吉尼亚州成功完成第一次试飞,试飞科目包含起飞、空中悬停、降落,试验全程不到1min。首飞测试了该机在起降全过程中的自动或自主飞行能力。未来,PAV电动垂直起降飞行器将继续进行测试,以实现自主客运货运服务。
1.设计特点
PAV双座电动垂直起降飞行器采用常规气动布局设计,是一种固定翼旋翼构型。固定安装在机身两边支架上的8副升力螺旋桨为PAV垂直起降提供升力,固定安装在机身尾部的1副推进螺旋桨为前飞和巡航提供推力。动力能源全部采用电池,所有螺旋桨由电动机驱动,以减少污染排放和降低噪声,达到绿色静音飞行的目的。先进的机身整合了动力系统和机翼系统,可实现高效悬停及前向飞行。
2.技术数据
该机机长约8.53m,固定翼翼展9.14m,航程约80km,乘客为2人。
(未完待续)