光子TOA与自转频率误差对Crab脉冲星脉冲TOA估计的影响
2024-01-30朱鸿旭
朱鸿旭
(西安开放大学,西安 710048)
0 引言
脉冲星是一种具有超高的密度、温度与压力,极强磁场,且自旋超稳定等特质的自然天体,被誉为天文和物理研究的天然实验室。通常来说,脉冲星具有射电波段到Gamma射线的波段的电磁辐射。由于脉冲星自旋非常稳定,故可以将它的自旋情况作为一个稳定的频率源。由于计时需要一个稳定的频率源,故脉冲星所具有的特质非常适合用于计时,并进一步地用来导航。
Crab脉冲星是研究脉冲星计时与导航相当重要的一颗脉冲星。它是公元1054年超新星爆发的产物[1],相较于毫秒脉冲星,Crab脉冲星比较年轻,目前仍在不断发生各种内部物理过程,导致其自旋相对不稳定,需要按月更新自旋参数。但Crab 脉冲星具有流量很强的全波段辐射,即使是微小卫星也可用Crab脉冲星作定轨[2],更便于在脉冲星计时与导航的理论验证阶段观测、分析。故国内外的X射线脉冲星导航试验都将其作为重要的观测源进行观测研究,例如我国的X 射线脉冲星导航试验卫星(X-ray pulsar navigation-1,XPNAV-1)即将其作为主要的探测目标[3]。
由于脉冲星信号是自然天体辐射的频率源信号,相较于卫星导航系统,其信号不易受到人为干扰,更有利于近地和深空的自主导航需求[4]。在地外由于几乎不存在光电离,同时小面积探测载荷即可探测X射线辐射光子,因此利用X 射线信号进行脉冲星导航具有更强的可行性。近年来,美国国家航空航天局(National Aeronautics and Space Administration,NASA)的X 射线计时和导航技术站探测器(Station Explorer for X-ray Timing and Navigation Technology,SEXTANT)团队利用其中子星内部组成探测器(Neutron Star Interior Composition Explorer,NICER)对X 射线脉冲星展开为期2 年的计时观测,其得到的长稳计时精度目前已达到10-14量级,已经接近原子钟的长稳水平[5]。若展开进一步观测,脉冲星的计时精度有望进一步提升1~2个数量级,超过了常见原子钟的计时精度,充分显示出X 射线脉冲星在计时与导航领域的巨大潜力。其他一些国家也进行了地外脉冲星观测实验[6-8]。与此同时,我国的“天极”伽玛暴偏振探测仪POLAR,XPNAV-1,硬X 射线调制望远镜(hard Xray modulation telescope,HXMT)等都进行了X 射线脉冲星导航试验[9-11]。以上试验均取得了扎实而丰硕的成果,从各个层面不断验证了X 射线脉冲星计时及导航应用的原理。最近我国的龙虾眼X 射线探测卫星成功在轨运行,也必将为X 射线脉冲星导航的未来发展注入新的动能[12-13]。
对于我国已进行的脉冲星计时与导航观测试验而言,HXMT与XPNAV-1卫星具有一定的代表性。“慧眼”(Insight)硬X 射线调制望远镜(HXMT)卫星是我国首个空间天文卫星,自升空以来,对黑洞、脉冲星等高能天体与伽马射线暴等天文现象展开了一系列的重要科学观测。该卫星搭载了HE,ME,LE(高、中、低能)三个主要载荷用于展开观测,探测器总面积超过6 000 cm2,观测能段为1~250 keV。XPNAV-1是由中国空间技术研究院(China Acadency of Space Technology,CAST)设计研制。XPNAV-1的发射解决了中国研制的探测器“看得见”脉冲星的问题。该卫星搭载了掠入射Wolter-I聚焦型X 射线探测器,探测器面积为30 cm2,观测能段为0.5~10 ke V。显然,面积更大的探测器更有利于获得更好的观测数据。但对于脉冲星导航在未来航天任务中的实际应用而言,考虑到卫星上其他载荷的存在,X 射线探测器要符合低成本、轻量化的需求,难以通过持续增大探测器面积的方式提升观测效果[14]。在观测面积上的不足可部分通过算法弥补,如武达亮[15]提出利用超分辨率匹配估计检测脉冲星观测轮廓的畸变和相移的方式改善轮廓信噪比;王奕迪等[16]提出单探测器也可通过分时段观测不同脉冲星的方式作脉冲星导航,提高了导航性能;杨嘉慧等[17]提出利用基于变分模态分解的改进容积卡尔曼滤波的方式进行脉冲星导航,一定程度上规避了测量噪声不确定带来的影响;李璟璟等[18]提出可以利用脉冲星作分布式导航,更好地利用弱脉冲星信号和小面积探测器。因此,小面积探测器作脉冲星计时导航试验同样具有重要现实意义。分析随机误差对不同面积的探测器X 射线脉冲星计时观测的影响,对于验证X 射线脉冲星计时与导航原理有着同样重要的积极作用。
脉冲星自身自旋极其稳定,若脉冲星信号在宇宙传播过程中遇到的干扰均被精确量化,到达时间(time of arrival,TOA)转换模型足够完善,归算过程采用的太阳系星历表与获得脉冲星星历采取的星历表相同且精度也足够高,同时接收机的噪声温度非常低,那么衡量脉冲TOA 测量精度的量——脉冲TOA 测量误差应当极小,甚至趋近于0[19]。显然,上述情况在实际计时与导航观测中难以出现,需要提供高精度历表或及时更新有关参数。考虑到脉冲星导航技术将来主要用于探月[20]、探火[21]以及其他深空自主导航环境[22],或特殊情况下的自主导航,因此地面上注数据有限,需要卫星在空间自主维持时间尺度,自主更新脉冲星星历参数。目前有关算法研究较为丰富,如王禹淞等[23]、刘劲等[24]、王奕迪等[25]分别提出可利用太阳或其他恒星辅助脉冲星导航;武达亮等[26]采用复合测速的方法充分利用脉冲星信息,提升了导航精度;熊凯等[27]提出可以充分利用星间链路与脉冲星观测信息作组合导航。以上算法均取得了良好的预期效果。
然而,上述脉冲星自主计时导航算法需要优质的观测数据与高精度的脉冲星星历先验数据作支撑。由于星载空间有限,难以无限制地通过加大观测面积的方式实现计时与导航需求,而脉冲星计时导航观测也无法无限制地通过增长观测时间的方式达到预期效果[28],脉冲星星历误差的存在同样会显著降低探测器的观测效果。故需要尽可能在脉冲星全自主计时、导航前上注高精度的脉冲星星历,同时合理安排载荷模块,使得在允许的观测误差条件下尽可能将载荷小型化。因此,为了对后续观测的载荷模块提出更科学的指标性需求,有必要对脉冲TOA 估计中的误差进行量化分析,以便更好地实现在空间利用脉冲星自主维持时间基准、自主导航的远期目标。
对脉冲TOA 估计过程具有影响的误差源种类多样,如太阳系天体位置、转换模型、脉冲星的位置等[29]。而在误差源中光子TOA 的测量误差与脉冲星自转频率的误差对脉冲TOA 估计具有直接而重要的影响。为确定二者对脉冲TOA 测量精度的影响,本文首先将仿真生成含有不同大小随机误差的太阳系质心(solar system barycenter,SSB)处Crab脉冲星光子到达时间(光子TOA)的脉冲光子,采用含有不同大小自转频率随机误差的Crab脉冲星星历,通过历元折叠建立积分脉冲轮廓。将积分脉冲轮廓与标准脉冲轮廓作互相关,得到含有不同仿真误差的脉冲TOA。将含有误差的脉冲TOA 与不含有误差的Crab 脉冲星模型参数预报的脉冲TOA 作差得到脉冲TOA 测量误差。分析不同大小的光子TOA 随机误差与Crab脉冲星自转频率误差带来的Crab脉冲星脉冲TOA 测量误差,并进一步评价估计其对Crab脉冲星计时与导航可能带来的影响。
1 带有随机误差的光子TOA建模
探测器在SSB处接收X 射线脉冲星辐射光子的过程,可数学抽象为一个具有时变速率的非齐次泊松过程[30]。令Crab 脉冲星的流量密度函数为λ(t),λ(t)即为该非齐次泊松过程的强度函数,可表示为
式(1)中,λb表示背景光子流量密度,λs表示Crab脉冲星光子流量密度,h(φdet(t))表示标准脉冲轮廓,上述参数可由仿真条件确定;φdet(t)表示探测相位,其中φ∈(0,1]。则此时在一个时间间隔Δt内探测到一个光子的概率为
探测到多个光子事件的概率为
其中Mt代表(0,t)收到的光子总数。在确定的时间间隔(ts,tr)内对λ(t)作积分,即为该段时间内探测器接收光子数量服从的泊松分布参数,令λ=,则
由于该过程具有独立增量,其均值和方差皆为λ,同时在一个周期内λ(t)均为已知量,且光子TOA 关于强度函数(即λ(t))服从均匀分布,因此一个周期内的光子TOA 均可由泊松抽样获得。但结合实际观测[31]可知,探测器在Crab脉冲星的一个周期内甚至未必能探测到一个光子事件。由于Crab脉冲星的自转存在缓变,在10 min量级内可对相位函数φ(t)作二阶泰勒展开,即由
计算得出[32],其中υ0代表初始频率,t0代表仿真起始时刻,ο(·)表示高阶无穷小。式(5)能较好拟合Crab脉冲星的自转相位。而λ(t)与φ(t)具有直接的函数关系,故在若干个周期内对λ(t)作积分、抽样,同样能够获得符合光子探测过程的仿真光子。在仿真观测时间内不断重复抽样过程,即可获得一段时间内的光子TOA 仿真数据。为提高抽样效率,本文选取的抽样时间间隔固定为1 s,此时抽样与积分产生的误差不会对光子TOA 精度带来明显影响。上述过程所得到的光子TOA 为不含有随机误差的光子TOA。
由上述过程模拟生成时间间隔(ts,tr)内光子TOA 的步骤如下:
1)计算仿真ts的脉冲星自转相位φ(t)与自转频率υ(t);
2)以ts的自转速率计算标准脉冲轮廓一个bin所代表的时长Δt与(ts,tr)内bin的个数n;
3)按式(1)计算ts至tr内所有bin起点的λ(t),在(ts,tr)内求级数(离散积分):λ=,其中λ(t)i代表第i个bin起点的λ(t);
4)以λ为参数作泊松抽样,确定(ts,tr)内的光子个数k;
5)光子对应的λ(t)此时服从均匀分布U(0,λ),作k次抽样后获得每个光子对应的λ(t),再内插获得光子TOA。
在实际的光子TOA 的测量过程中,其时刻记录一定存在系统误差与偶然误差。系统误差是由于测量或观测过程中的固有偏差或系统偏移引起的。它通常是由于仪器的缺陷、校准问题以及环境条件等因素导致的。对于光子TOA 测量而言,系统误差通常包括星载原子钟误差、探测器灵敏度、最小分辨率(如:时间分辨率)误差、探测器读出时间延迟、探测器本底噪声、探测效率、量化误差(±1)、舍入误差等[33],其对光子TOA 测量结果产生持续性的偏离,即每个光子TOA 测量值都相对真值有一个固定偏差。星载原子钟误差往往具有不对称性或者其他非均匀分布特征,但在星载原子钟误差得到上注信息校正,且观测时间较短时,系统误差可认为由原子钟误差之外的其他因素累加引起。系统误差具有复杂的随机性,难以准确描述和建模。但由于系统误差往往表现为在一定范围内变化,为简化数据处理和统计分析的数学模型,其对测量结果产生的固有偏差或系统偏移影响可假设为无偏且服从均匀分布,以便于后续对其进行进一步的数据分析与参数估计[34]。光子TOA 测量时产生的偶然误差则是由卫星在空间中受到的外部干扰(如:电磁干扰、太阳风、稀薄大气)、卫星的位置偏差、光子TOA 记录算法误差、仪器记录过程中产生的误差等多个不确定随机因素叠加引起。根据中心极限定理,当许多独立随机变量相互作用时,它们的和趋于正态分布。而探测器的装配误差项既包含系统误差,又包含偶然误差[35]。为控制变量,分别量化分析系统误差与偶然误差对轮廓与脉冲TOA 测量精度带来的影响,现将tMi加入服从均匀分布U(-EU,EU)的误差tEU,或加入服从正态分布的误差tEN。对于第i次仿真观测,得到的第j个无额外误差的光子TOA 为tMij。 加入系统误差的光子TOA 为
对于第m次仿真观测,得到的第n个加入随机误差的光子TOA 为
本文系统误差参数EU与偶然误差参数EN的取值范围均为{0,1,10,100,500,1 000}(单位:μs)。
2 Crab脉冲星X 射线脉冲TOA 误差分析过程
2.1 生成流量密度函数
要生成光子TOA,首先需要标准脉冲轮廓来提供高精度的脉冲星流量密度函数。NASA 发射的罗西X射线计时探测器(Rossi X-ray Timing Explorer,RXTE)卫星提供了Crab 脉冲星标准脉冲轮廓数据,被认为是Crab脉冲星观测的标准数据[36]。该轮廓由多年累积数据获得,平滑程度好,信噪比高,适用于提供流量密度函数,生成光子TOA 仿真数据,如图1所示。
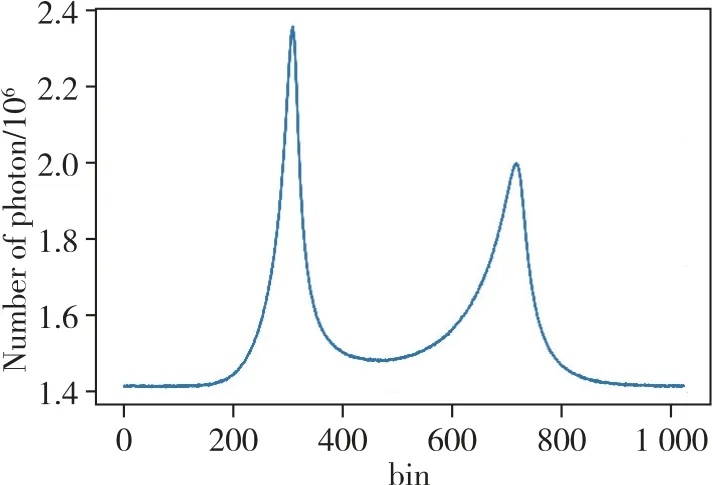
图1 RXTE提供的Crab脉冲星标准积分轮廓Fig.1 Crab pulsar standard pulse profile provide by RXTE
图1中,横轴代表子相位间隔(bin),表示将一个自旋周期平均分成M份构成的相位间隔。对于RXTE提供的Crab脉冲星标准积分轮廓而言,M=1 000。纵轴代表落在各个区间内的光子个数,这里用百万光子表示。
仿真同时需要确定观测条件。作为我国典型的两颗X 射线脉冲星观测卫星,HXMT 的探测器总面积约是XPNAV-1的200倍。而对于实际观测数据而言,HXMT 的有效光子探测效率同样约为XPNAV-1的200 倍,且背景光子占比略低于XPNAV-1[37],更有利于得出更高质量的科学观测数据。但对于脉冲星导航的远期实际应用而言,小型化的载荷更具有实用价值,便于探测器展开深空自主导航。故对于两种类型的探测器的分析同样重要。鉴于此,本文参考HXMT 与XPNAV-1 的硬件参数[31]与实测数据设定仿真采用的硬件条件与光子流量,旨在模拟不同探测器观测Crab脉冲星时的性能和误差特性。
脉冲星的自转频率存在缓慢的变化,甚至有时会出现自转突变(glitch)现象,导致脉冲星自转角速度突然增大,故脉冲星信号并不是严格的周期信号。尤其是模拟光子数量较大且模拟观测时间较长时,不能认为脉冲星信号是理想的周期平稳信号。模拟脉冲星信号的频率缓变特性,对于周期折叠、周期搜索、脉冲TOA 估算和长时间导航等算法的验证具有重要意义。在不考虑glitch现象时,确定脉冲星自转频率的一、二阶导数即可获得较好的模拟效果,这里参照文献[38]设定仿真采用的Crab脉冲星星历参数。
假设卫星同时搭载了大面积探测器a与小面积探测器b,在参考历元时刻卫星接收到了上注数据,获得了最新的脉冲星星历,部分校正了星载原子钟钟差,与此同时两个探测器同时对Crab脉冲星展开观测。由于仿真起始时刻钟差、星历得到了地面上注数据的校正,故可认为卫星仿真观测时的测量误差都是无偏的。采用的仿真条件如表1所示。
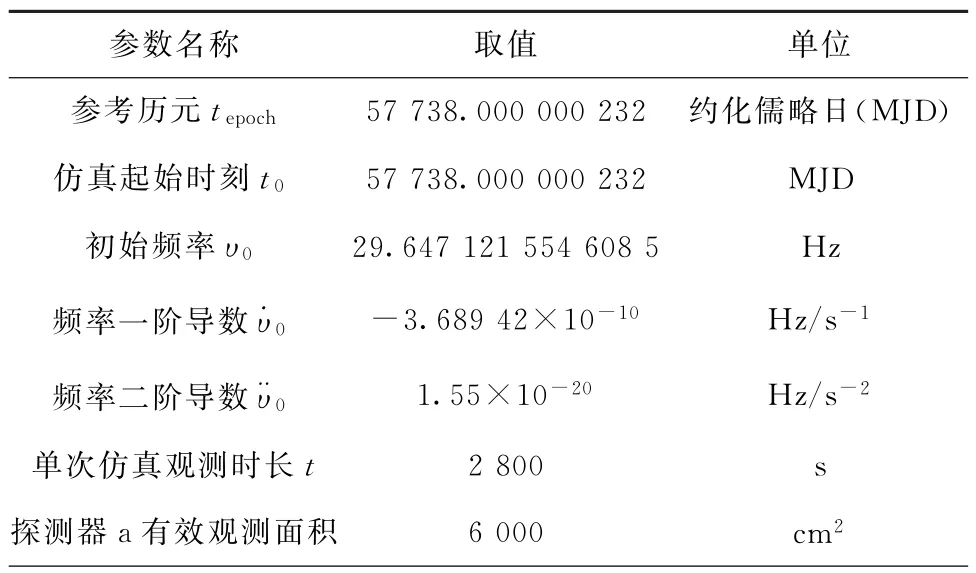
表1 仿真条件Tab.1 Simulation conditions
2.2 考虑自转频率误差的积分脉冲轮廓折叠
通过光子TOA 序列获得脉冲TOA 的方法,整体而言可分为历元折叠与非历元折叠两大类[39]。由于本文的仿真条件已知Crab脉冲星星历,且具有一定的光子流量。故通过历元折叠与时域相关的方式计算脉冲TOA 效率最高。进行历元折叠时,需要将光子累积到同一周期后得到积分脉冲轮廓,再与标准脉冲轮廓进行互相关处理方能得到该组观测的脉冲TOA。通常历元折叠的方法又可分为两种,一是搜寻到脉冲星自转频率后,逐个计算光子TOA 对应的相位并归算到所在的bin,统计每个bin中的光子数,构造直方图获得脉冲轮廓;二是直接利用精确的脉冲星星历,折叠出以脉冲星星历的参考历元时刻tepoch为相位起点的脉冲轮廓。由于仿真条件包括了脉冲星的自转频率及tepoch,故采取第二种方法作历元折叠。具体做法为在对某组仿真观测进行历元折叠时,将该次观测第一个光子SSB处TOA 时刻作为起点(即积分脉冲轮廓的相位零点),利用式(5)与公式
可以计算出该组观测每个光子SSB处的TOA时刻,同时可得到对应的Crab脉冲星自旋相位φi1,φi2,…,φij,…。其中i表示第i次观测,j表示该次观测的第j个光子。将该次观测的所有光子的相位都减去该次第一个光子相位φi1,去掉整周期后获得了归一化自旋相位的小数值,即为该光子所对应积分脉冲轮廓的相位值。根据文献[40],脉冲星计时与导航宜取bin的个数为2的次幂。即将一个自旋周期等分为若干份,获得若干个长度相等的子相位间隔。本文分别采取bin 数为M1=256,M2=512进行计算,以期获得更精确的脉冲TOA 测量误差。将子相位间隔与该次观测所有光子的相位值建立轮廓关系,即为无Crab脉冲星自转频率误差的积分脉冲轮廓。
如前文所述,由于Crab脉冲星的内部仍有一定的物理过程[41],同时还存在着长期演化现象[42]。这些物理过程可能导致脉冲星的自转频率漂移、自转频率波动甚至glitch现象的发生,这些误差都对Crab脉冲星的自转频率引入了不确定性,尤其构成了短期的频率误差。由于上述误差为系统误差,故可近似等效为服从均匀分布。仿真时令其相对误差ρ服从,本文自转频率误差参数的取值范围为:ER= {0,10-8,10-7,5×10-7,10-6,5×10-6},是无量纲的系数。设某次仿真为含有自转频率误差的仿真,则该次仿真的初始频率υ0E可表示为
对获得的光子按照不同的ρ进行历元折叠,可获得含有Crab脉冲星自转频率误差的积分脉冲轮廓。为控制变量,本文对存在不同大小的EU、ER与存在不同大小的EN、ER分别进行仿真。对每个误差参数组各进行100次仿真观测,得到共计13 200组仿真观测数据。
2.3 计算脉冲TOA测量误差
将得到的各组标准脉冲轮廓和积分脉冲轮廓进行互相关处理,获得观测脉冲TOA,对观测脉冲TOA 作多项式拟合项修正,可部分提升脉冲TOA测量精度,提升程度约为0.01 bin[43]。由于本文采用的仿真起始时刻即为参考历元时刻,故观测TOA直接减去参考历元时刻即为脉冲TOA 测量误差。
由于RXTE 提供的标准脉冲轮廓采用的bin数M=1 000,而获得脉冲TOA 测量误差时采取的标准脉冲轮廓与积分脉冲轮廓所采用的bin数须相同[44],故需要利用M=1 000的标准脉冲轮廓生成M1=256与M2=512的标准脉冲轮廓。此时,可以采用逆插值的方式直接生成,但逆插值的方式会导致轮廓损失较多的高频信息。这里本文采取按照探测器a的仿真参数,EU,ER与EN均为0,实验1 000 次获得的仿真光子按照上述方式进行历元折叠所产生的轮廓作为互相关运算采用的标准脉冲轮廓,如图2所示。
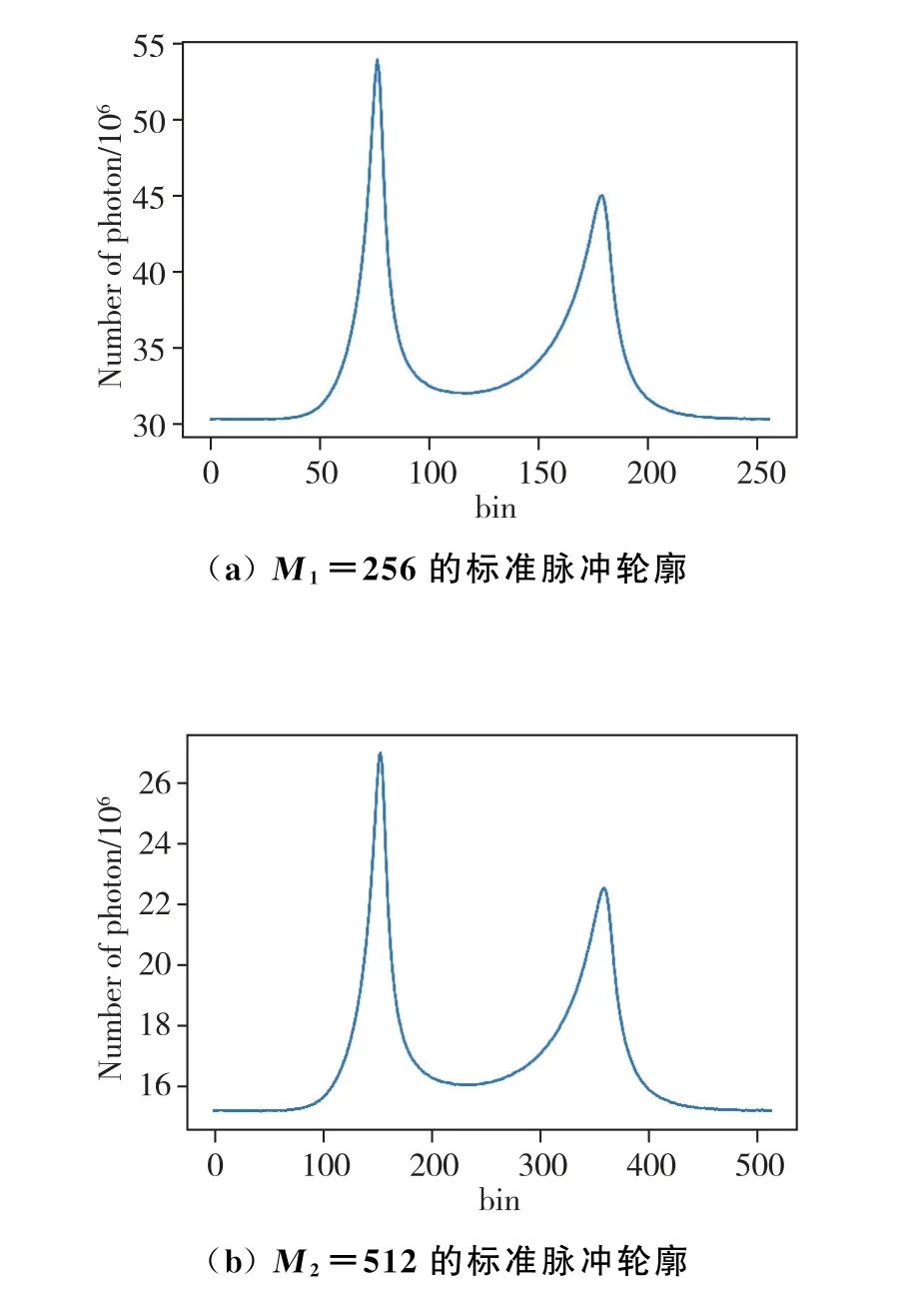
图2 互相关运算采用的标准脉冲轮廓Fig.2 Standard pulse profile for cross-correlation
3 仿真结果与分析
3.1 仿真结果
将不同的误差参数组组内的100个积分脉冲轮廓取平均值,获得该误差参数组平均积分脉冲轮廓。图3、图4中,黑色曲线是EU,EN均为0μs的平均积分脉冲轮廓,红色曲线是考虑光子TOA 的系统误差,EU=1 000μs时的平均积分脉冲轮廓,蓝色曲线是考虑光子TOA的偶然误差,EN=1 000μs时的平均积分脉冲轮廓。横轴代表bin,其中M2=512;纵轴代表落在各个区间内的光子个数。分图(a),(b),(c),(d),(e),(f)分别对应取图示的光子TOA误差参数时,自转频率误差参数ER取0,10-8,10-7,5×10-7,10-6,5×10-6。图3、图4分别代表探测器a与探测器b的结果。
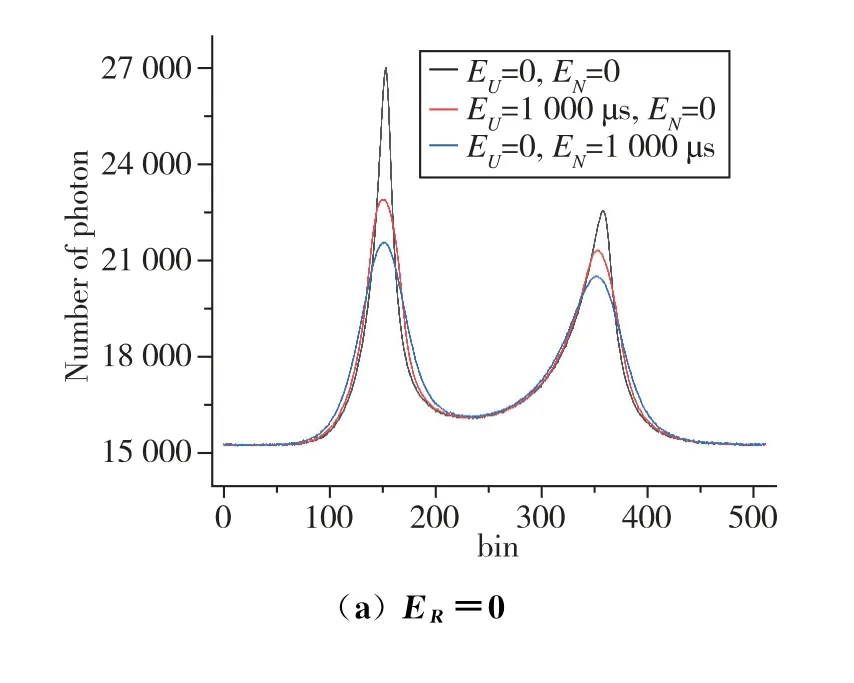
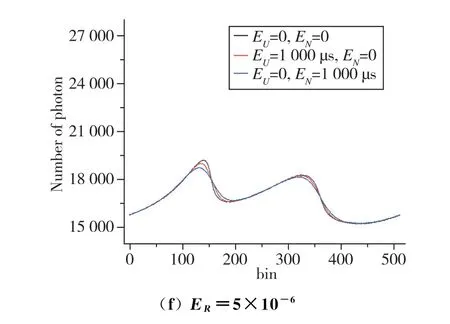
图3 探测器a平均积分脉冲轮廓Fig.3 Average integrated pulse profile of Detector a
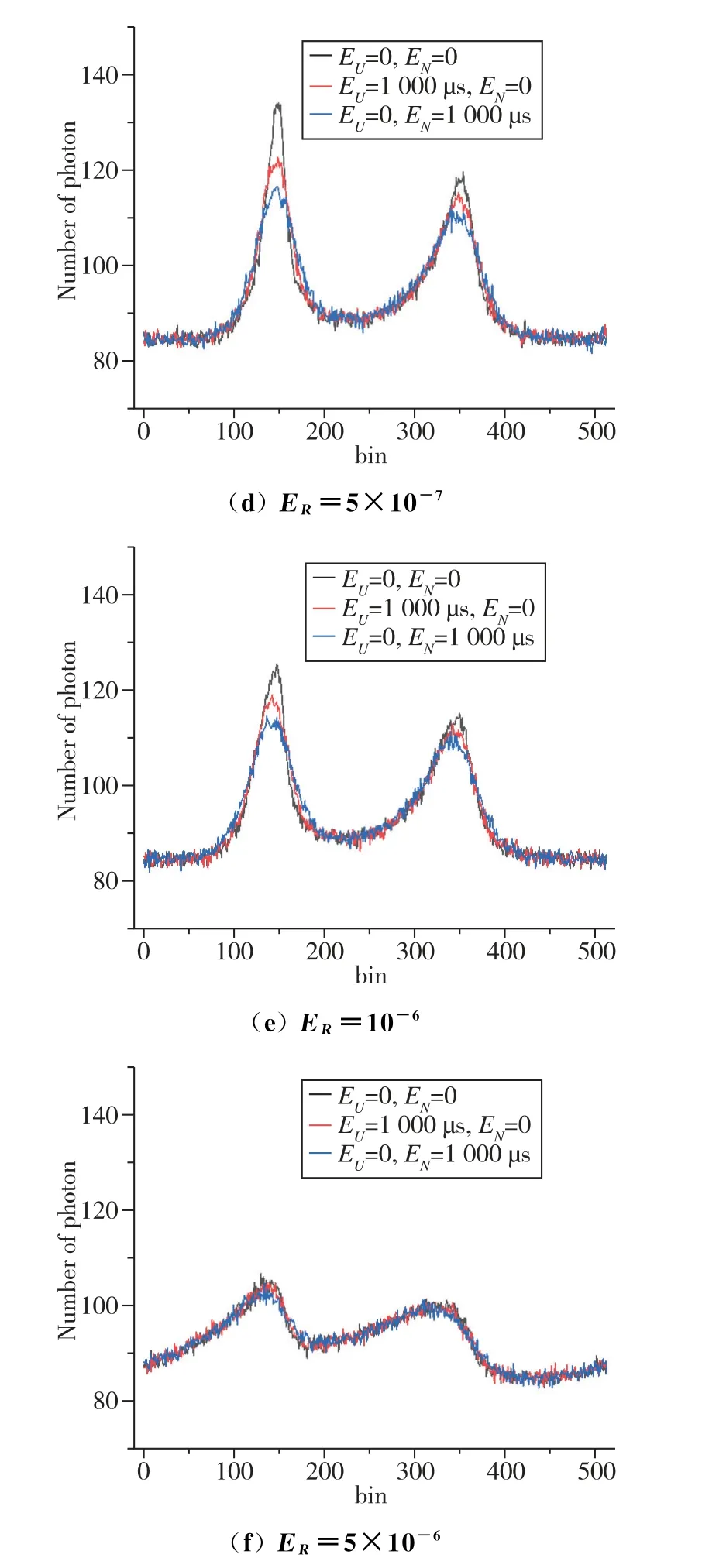
图4 探测器b平均积分脉冲轮廓Fig.4 Average integrated pulse profile of Detector b
通过将图3、图4分别对比标准脉冲轮廓可见,随着误差参数的逐渐增大,轮廓的主峰峰值与次峰峰值逐渐变小,两个峰的半高宽度明显展宽,两个峰的峰值差明显减小,同时产生了一些标准脉冲轮廓不具备的毛刺等细部特征。尤其当ER取到5×10-6时,平均积分轮廓已发生显著失真。而考虑随机误差时,上述特征更为明显。而对比图3、图4可以发现,探测器a与探测器b获得的平均轮廓整体特征相同,但探测器a的平均轮廓更为平滑。这些都代表脉冲轮廓随误差参数的增大与光子探测效率的下降,轮廓畸变程度逐渐加深,体现了两个探测器对不同误差大小的响应方式,是符合预期的。
更为准确地描述误差对脉冲TOA 测量精度带来的影响,需要用到由积分脉冲轮廓计算的脉冲TOA测量误差均方根(root mean square,RMS)。对探测器a和b每个误差参数组内的100次仿真观测,计算每个观测的脉冲TOA 测量误差,再计算该误差参数组的脉冲TOA测量误差RMS,得到表2与表3。
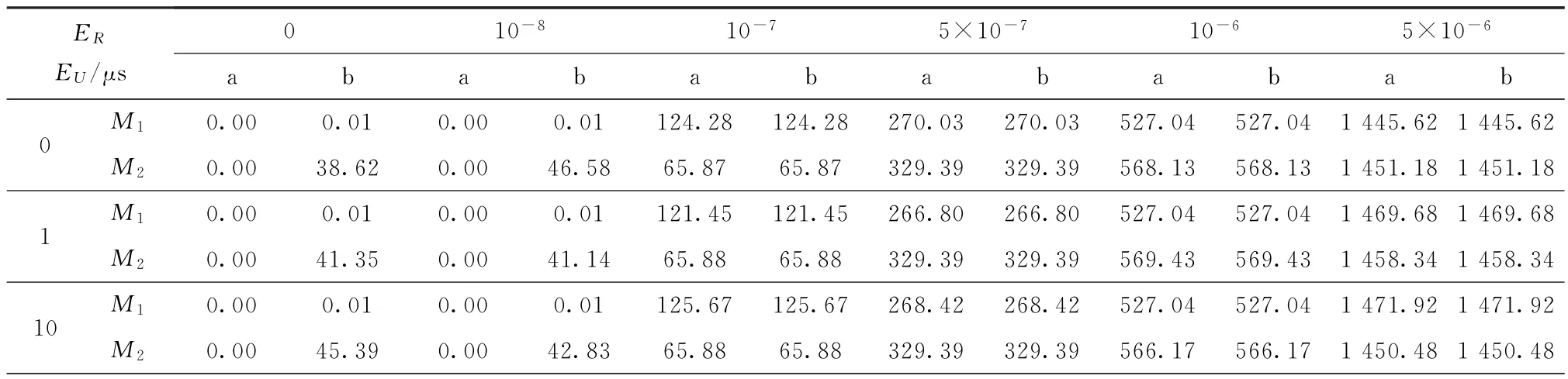
表2 带有光子TOA系统误差与脉冲星自转频率误差的仿真观测脉冲TOA测量误差RMSTab.2 Simulation observation pulse TOA measurement error RMS with photon TOA systematic error and pulsar rotation frequency errorμs
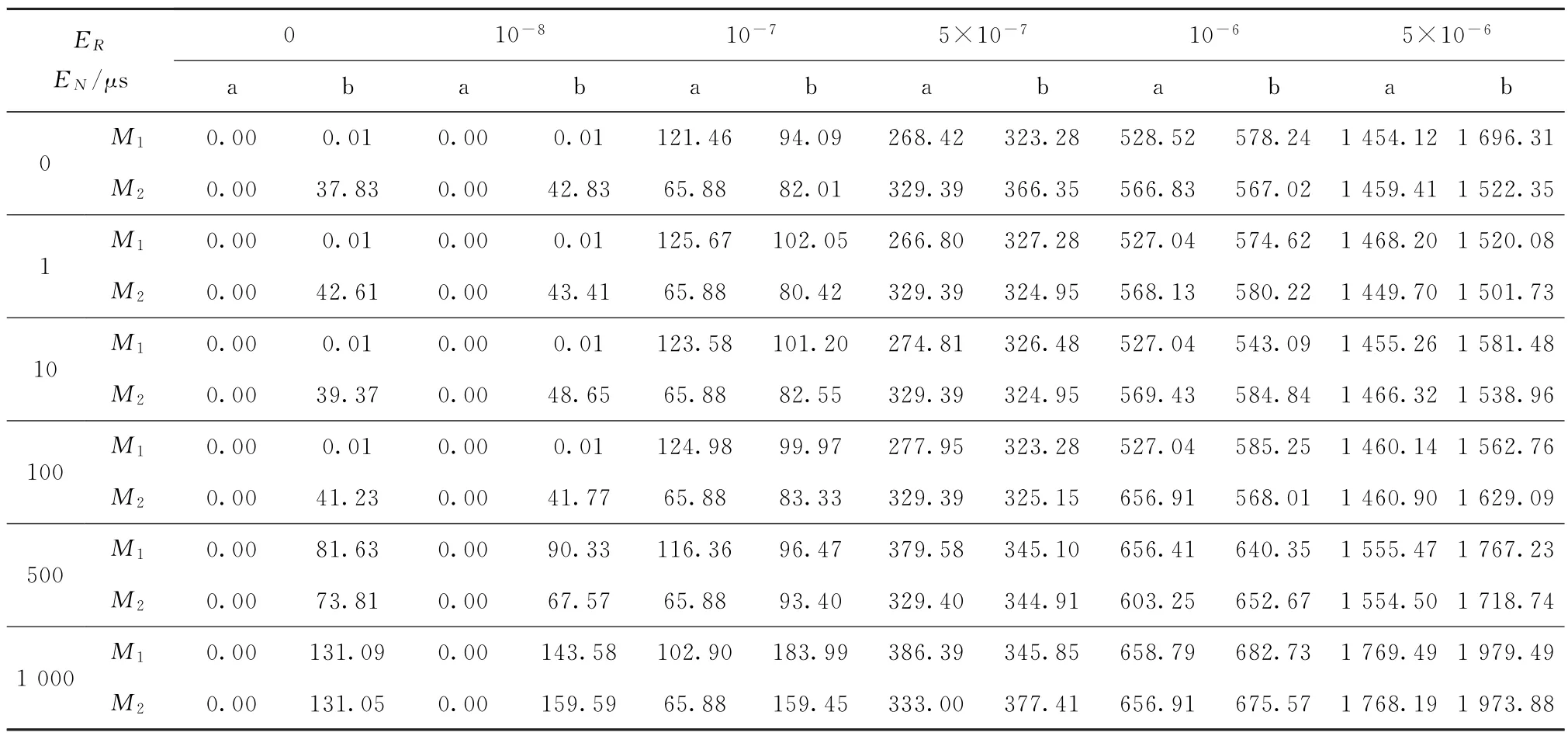
表3 带有光子TOA偶然误差与脉冲星自转频率误差的仿真观测脉冲TOA测量误差RMSTab.3 Simulation observation pulse TOA measurement error RMS with photon TOA accidental error and pulsar rotation frequency errorμs
3.2 仿真结果分析
分别对比探测器a与探测器b的仿真结果,当自转频率误差参数ER取0或10-8时,比较不同测量误差参数EU和EN的仿真结果发现,探测器a的全部误差参数组以及探测器b在M1=256,测量误差参数较小时,脉冲TOA 测量误差RMS 小于10 ns量级。事实上,对于单次脉冲TOA 测量而言,脉冲TOA 测量误差包括了时域相关项与多项式拟合项。时域相关项的测量精度为一个bin 代表的时长,多项式拟合项为时域相关项的一个修正项。故测量结果中脉冲TOA 测量误差RMS 小于10 ns量级的结果,可认为该组的各次测量时域相关项均为0。但对比平均积分脉冲轮廓可知,随着测量误差参数EU和EN的增大,轮廓的失真程度逐渐加深。说明在上述误差参数组的仿真条件下,脉冲TOA 测量误差没有超过一个bin代表的时长。探测器b在M2=512时以及在M1=256,测量误差参数较大时,脉冲TOA 测量误差随着测量误差参数的增大而逐渐增大,说明测量误差参数的增大对探测器b 影响更为明显,较少的光子数不足以平滑误差。
当自转频率误差参数ER=10-7时,若M1=256,探测器a的脉冲TOA测量误差高于探测器b的脉冲TOA 测量误差;若M2=512,结果相反。由于探测器a的积分脉冲轮廓要显著平滑于探测器b的积分脉冲轮廓,较小的bin数误差分辨率低,影响了探测器a的脉冲TOA测量误差结果。ER=5×10-7,EU,EN<100μs,探测器a的脉冲TOA 测量误差整体小于探测器b的脉冲TOA 测量误差;ER=5×10-7,EU,EN>100μs或ER>5×10-7时,两个探测器的脉冲TOA 测量误差已无明显区别。这可能是由于探测器a的信号光子丰富,获得的积分脉冲轮廓较为平滑,一定的无偏光子TOA 的测量噪声可以较好滤除,获得更好的脉冲TOA 测量误差。而探测器b的信号光子数量有限,不足以通过轮廓折叠的方式完全滤除光子TOA 的测量噪声。但误差持续增大时,通过增大探测器面积对光子TOA噪声滤除的作用不显著。
分别对比表2和表3可发现,光子TOA 的偶然误差相比于光子TOA 的系统误差对脉冲星X 射线波段的脉冲TOA 测量精度带来的影响更大。但只要该误差是无偏的,除非光子TOA 的测量误差为500μs量级时,光子TOA 的测量误差对脉冲星的单次脉冲TOA 测量误差的影响均小于时域相关项的测量精度。这可能是由于轮廓折叠过程可以等价于一个低通滤波器,不同的bin数取值相当于不同的低频阈值。较小的光子TOA 测量误差可以视作高频噪声,故可以将较小的光子TOA 测量误差直接滤除,不体现在脉冲TOA 测量误差中;只有当光子TOA 测量误差较大,出现了低频成分时,才对脉冲TOA 测量误差具有显著影响。这体现了轮廓折叠计算脉冲TOA 与脉冲TOA 测量误差的方法对于高频噪声具有较强的鲁棒性。
比较不同脉冲星自转频率误差的仿真结果可以发现,脉冲星计算脉冲TOA 测量误差时对脉冲星自转频率误差较为敏感,在ER=10-8时即已对脉冲TOA 测量误差RMS 产生实质影响。对于Crab脉冲星,此时的频率误差约为3×10-7Hz。随着ER的尺度继续增大,其对脉冲TOA 测量误差RMS的不利影响逐渐加深。本文认为,由于脉冲星自转频率误差对于光子TOA 的影响直接作用于频率,导致难以滤除,故该误差会对脉冲TOA 测量误差RMS造成更为显著的影响。由于实际应用时除了Crab脉冲星的自转频率误差外,尚存在太阳系行星历表误差(如:不同的DE历表转换带来的误差或DE历表自身存在的误差)、光子TOA 转换模型误差、脉冲星星历其他项的误差等其他误差源,因此实际上在导航应用中留给上述各误差项的误差分量要求指标会更高。
对于脉冲星导航未来的深空自主导航应用场景而言,一般认为位置精度d为10 km 量级是可接受的。此时对探测器的脉冲TOA 测量精度要求大致为d/c,即30~300μs左右,其中c代表光速[29]。结合表2、表3可知,当归算到自转频率的总误差控制在3×10-6Hz(即ER=10-7)时,探测器a分别考虑光子TOA 系统误差、偶然误差的脉冲TOA 测量精度均约为65μs;探测器b的脉冲TOA 测量精度始终低于探测器a,但除了EN>500μs的情况外也可控制在100μs内。考虑到实际观测时误差项的合成,不宜接受更大的误差参数。同时可发现探测器b不易达到对脉冲TOA 测量精度小于30μs的要求。因此若将Crab脉冲星作深空计时观测应用于其他对脉冲TOA 测量精度要求更高的场景时,要适当增大探测器的有效探测面积,就本文仿真采取的观测条件而言,bin数取512 要整体优于256的结果。但由于bin 数越大,需要的计算资源越多,因此在实际星载计算时需要做出平衡。同时需要说明的是,小型探测器是通过增长观测时间实现获得更多的信号光子的目的,而误差项往往会伴随观测时间增长产生积分。因此对探测器b的条件要求会比探测器a的要求更为苛刻。
4 结论
本文通过研究,得到如下结论:
1)经对比发现,随着仿真误差的逐渐增大,积分脉冲轮廓产生了畸变,同时各仿真观测组的脉冲TOA 测量误差RMS逐渐升高,而系统误差对脉冲TOA 测量误差的影响小于偶然误差。
2)对于观测Crab脉冲星而言,在脉冲TOA 短期测量精度为30~300μs量级的要求下,有效面积为6 000 cm2,30 cm2的探测器归算到自转频率的总误差要同时控制在3×10-6Hz(即ER=10-7)以内,30 cm2的探测器同时需满足光子TOA 的偶然误差最低应控制在500μs以内。若对脉冲TOA 测量精度有更高要求,有效面积为30 cm2的探测器不易达到要求。
3)对于本文采取的观测条件而言,观测Crab脉冲星历元折叠时采取的bin数M2=512整体优于M1=256的结果。本文同时验证了历元折叠的测量方式对于光子TOA 测量中的高频噪声具有较强的鲁棒性。
以上主要对误差Crab脉冲星X 射线波段的短期脉冲TOA 测量精度进行了仿真分析。今后将对Crab脉冲星与其他脉冲星X 射线波段的中期、长期脉冲TOA 测量精度的误差项作进一步的分析,并对光子TOA 记录误差、光子TOA 转换误差、DE历表误差与脉冲星星历误差、脉冲TOA 测量方法误差等误差项结合实测与仿真数据进行进一步细化分解,以便更好地为我国今后的脉冲星导航方案提供参考。
