磁浮列车机械制动系统交叉耦合控制方法
2024-01-27韩得水贾学梅袁春生
韩得水,李 宁,贾学梅,袁春生
(中车工业研究院(青岛)有限公司,青岛 266109)
磁浮列车是一种基于磁悬浮技术[1]的新型交通运输方式,利用磁力和电力悬浮在轨道上,通过电磁力驱动列车运行,具有速度快、能耗低、环保性强等优势,是未来城市交通的重要发展方向。磁浮列车在高速运行时需要具备可靠的制动力,确保安全停车和紧急停止。机械制动系统的控制器能够提供制动力满足列车的停车和减速需求。为了保障磁浮列车的安全运行,需要对磁浮列车机械制动系统进行控制。
文献[2]以磁浮列车机械制动系统速度跟踪快速控制为目标,利用自抗扰控制理论对控制器实施分解和改进,得到其相应的传递函数。对控制器结构实施优化,使其传递函数等效。在此基础上,引入一阶惯性环节加时滞环节(FOPTD)模型调整自抗扰控制器参数,实现对磁浮列车机械制动系统的速度跟踪控制。经该方法控制后的系统稳定性得不到保障;文献[3]提出基于反步法的磁浮列车机械制动体系控制方法。通过等效连续化和线性化出力构建ECP 的制动系统控制模式。引用已知上界的不确定点,并利用指数趋近定律的光滑模变结构实现对系统的局部鲁棒特征优化。设计控制律,并引入误差变量、Lyapunov 变量和一阶滤波器实施调控。该方法的操作耗时较长,整体控制效果也较低;文献[4]根据磁浮列车运行的周期性,对其机械制动系统实施运行控制。构建周期自适应补偿控制器。在电路数据未知的情况下通过该传感器学习上一个周期内的数据。估算出线路上增加阻力的未知值,减少对其所产生的干扰,进而实现机械制动系统的运行控制。该方法抗干扰能力较差。
为此,提出磁浮列车机械制动系统交叉耦合控制方法。
1 磁浮列车机械制动系统传递函数获取
在机械制动系统交叉耦合控制中,通过获取磁浮列车机械制动系统传递函数,得到不同系统参数对系统制动减速度的影响,为后续设计交叉耦合控制方法提供依据。机械制动系统是保障磁浮列车运行安全的关键系统,通常采用压力式制动方式[5],该制动方式的可控性较强,机械制动系统结构框图如图1 所示。

图1 机械制动系统结构框架Fig.1 Structural framework of mechanical braking system
根据图1 的机械制动系统结构框架,计算液压力伺服系统的传递函数如式(1)所示:
式中:Po和Lo代表液压力伺服系统的液压缸工作面积和负载刚度;Lf、Lc、Ls代表力传感器、伺服阀以及放大器的增益;ξ 为滑阀流量增益与其流量压力系数的比值;H(s)代表的是液压力伺服系统的传递函数;s 描述的是滑阀流量压力系数;Q1、V 分别代表的是运动部件质量和液压油压缩系数。
深度负反馈下的液压力伺服系统[6]描述为一种近似理想的放大环节,为此将其简化为
闸瓦相对速度μ 和闸瓦与轨道之间的摩擦系数ν[7]之间存在一定的关联性和非线性关系,其数学表达式如式(3)所示:
式中:S 代表闸瓦位移量。
在获取闸瓦与轨道之间的摩擦系数后,通过传动系统[8]制动阻力使车辆产生制动减速度,从而实现列车的减速和停车。由于列车总质量在制动过程中不会发生变化,因此可以将磁浮列车制动过程中列车实测总质量和参考总质量间的偏差值描述为一种静态误差,而实际摩擦系数与参考摩擦系数间的偏差为动态误差。
由此得到磁浮列车机械制动系统传递函数,如式(4)所示:
式中:o 代表制动减速度;i 代表制动减速度指令。
2 机械制动系统交叉耦合控制
利用磁浮列车机械制动系统传递函数设计合适的控制器,选择适当的控制策略,并确定控制参数。
2.1 控制方法设计
系统的摩擦系数和列车的总质量之间存在一定的耦合关系,无法较好地进行匹配,且磁悬浮过程中产生的不确定性扰动导致气隙同步误差较大[9-10],为此,建立气隙、速度双重交叉耦合控制器,实时计算控制参数间的同步误差,建立所有参数之间的协调关系,实现同步误差补偿,提高控制精度。具体过程为
(1)气隙控制
磁浮列车机械制动系统存在摩擦形式的制动器和轨道之间的气隙,会引起制动器连续力的不连续性,从而影响到列车的正常运行。为此,定义气隙同步控制目标以及同步函数:
展开上述同步函数泰勒级数得到气隙同步误差计算表达式如式(6)所示:
(2)气隙、速度双重交叉耦合控制器
在引入气隙控制后,磁浮列车机械制动系统的气隙同步性能有所改善,并有效降低了系统阻尼[11],而系统阻尼的主要来源为列车的速度信号,为此需要进一步地引入气隙、速度双重交叉耦合控制器。
设置速度同步误差φv,并与气隙耦合项相结合,生成同步误差φs=φo′+φv,通过耦合自动控制器对其展开相应处理,得到耦合项,生成交叉耦合控制y′=y+lsφs,其中y 为控制输入,ls为交叉耦合控制器增益。该交叉耦合控制器框图如图2 所示。
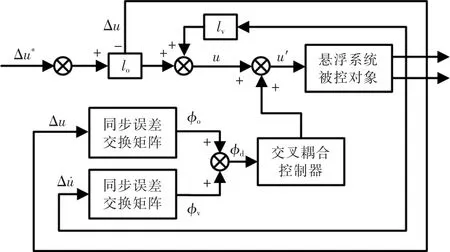
图2 交叉耦合控制器框图Fig.2 Cross coupling controller block diagram
考虑到电流反馈[12-13]对电感时间常数的影响,在上述控制中引入扰动量ΔOf用于等效实际外力扰动,如式(7)所示:
式中:lo和lv为气隙、速度交叉耦合的反馈增益。
(3)交叉耦合控制结果
机械制动系统的闭环输出为
式中:Hc(s)代表气隙输出的传递函数。在此基础上,引入交叉耦合控制,得到闭环系统交叉耦合控制结果:
式中:q 代表闭环控制系数;T 代表反馈信号;ld为交叉耦合控制参数。
其约束条件为
在引入交叉耦合控制后,若T>Z,则机械制动系统保持稳定状态,对交叉耦合控制参数ld实施调节,实现磁浮列车机械制动系统控制。
2.2 交叉耦合参数寻优
通过交叉耦合控制参数ld控制磁浮列车机械制动系统时,由于参数之间相互关联,需要综合考虑不同参数的取值,增加了参数调节的难度。交叉耦合参数寻优能够自动选择合适的参数整定结果,为此,利用参数寻优获得更精确的控制效果,保障机械制动系统控制精度。FOA[14-16]能够在提高响应速度的同时,将交叉耦合控制误差控制在最小范围,具有较强的全局搜索能力。为验证该算法的性能,以ITAE 最优传递函数JITAE作为交叉耦合控制器的性能评价指标:
式中:r(a)代表的是输入值和输出值的差值。
针对交叉耦合控制参数ld,FOA 算法的具体实现步骤为
(1)设定果蝇种群规模sizepop 以及最大迭代次数maxgen;
(2)初始化果蝇群的随机位置Kld;
(3)随机分配Kld的值:
(4)将得到的Kld值引入到交叉耦合控制器中,求出该果蝇个体相应的控制误差值JITAE;
(5)将果蝇群体寻找到的最优值作为误差最小值;
(6)根据误差最小值重新设定Kld值;
(7)反复实施步骤(4)~步骤(6),以此展开迭代寻优,在此基础上,若当前误差最小值为最优值,实施步骤(6)结束迭代寻优,获取交叉耦合控制的最优参数,进而实现机械制动系统的高精度控制,提高系统的安全性。
3 实验与分析
为了验证磁浮列车机械制动系统交叉耦合控制方法的整体有效性,需要对其展开测试。
以某市磁浮列车的原始机械制动系统数据为基础,设定果蝇群体规模为40,利用所提方法提供的交叉耦合控制参数寻优算法实施参数的迭代更新,100 次迭代计算的精度测试如图3 所。
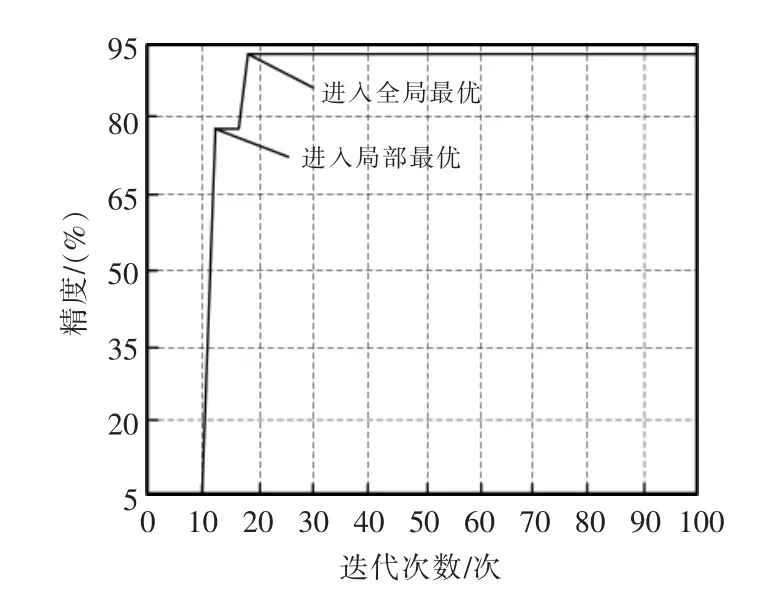
图3 100 次迭代计算的精度测试Fig.3 Accuracy test for 100 iterative calculations
通过图3 可知,所提方法能够在较短的迭代过程中实现收敛,仅通过12 次迭代,精度便从初始的5%上升至78%,进入局部最优解,而后迭代至18 次跳出局部最优,其目标参数成功收敛到全局最优,且精度维持在90%以上,说明所提方法能够提高控制精度。
在此基础上,验证所提方法的应用效果,利用所提方法完成磁浮列车机械制动系统交叉耦合控制的控制精度和效率两方面的测试。
(1)控制精度
采用所提方法对磁浮列车机械制动系统展开同步控制,以同步误差为测试指标,在系统受到1000 N 阶跃干扰以及周期为5 s 的周期扰动时,得到所提方法的同步误差,如图4 所示。

图4 所提方法同步误差Fig.4 Synchronization error of proposed method
分析图4 可知,采用所提方法能够使系统在受到不同干扰时均具有较高的同步跟踪性能,说明所提方法具有更高的控制精度。
(2)效率对比
进一步分析所提方法的性能,机械制动系统达到稳态的响应时间为衡量效率的重要指标,因此将其作为评价指标,通过10 次测试,所提方法达到稳态时间如表1 所示。

表1 所提方法达到稳态时间Tab.1 Time for proposed method to reach steady state
分析表1 可知,经过10 次测试,所提方法能够有效地考虑到磁浮列车机械制动系统的控制参数同步不确定性,使系统达到稳态所需的时间均在0.15 s 以内,平均耗时为0.11 s,具有较高的效率。
4 结语
提出磁浮列车机械制动系统交叉耦合控制方法。通过获取机械制动系统传递函数,引入气隙、速度双重交叉耦合控制器实行控制。采用FOA 获取控制器的最优控制参数,实现磁浮列车机械制动系统的交叉耦合控制。所提方法在一定程度上提高了控制精度和效率。