海底原位分层声学测量模拟装置的设计与实验
2024-01-26李跃金邹大鹏杨华勇崔小明李赶先
李跃金,邹大鹏,杨华勇,崔小明,吴 磊,李赶先
(1.广东工业大学机电工程学院,广东 广州 510006;2.南方海洋科学与工程广东省实验室(广州),广东 广州 511458;3.中国科学院边缘海与大洋地质重点实验室,中国科学院南海海洋研究所,广东 广州 510301)
海底沉积物声学特性的研究受到越来越广泛的关注[1-2],直接获得海底沉积物声学特性的方法主要有实验室声学测量法和原位声学测量法[3-4],两种方法都是应用各种声学测量仪器或者装置观测声波在海底沉积物中的传播速度和能量衰减特性。其中,原位声学测量可以得到扰动性较少的海底沉积物声学特性[5-6],但仪器设备复杂,成本较高。实验室声学测量相比原位测量可控性强,设备简易,易于操作。
当前应用于海底沉积物原位声学测量的系统:国外有沉积物声学现场测量系统(ISSAMS)[7]、声学长矛(Acoustic Lance)[8]、底质取样同步声学测量系统(ACS)[9]、沉积物声学测量系统(SAMS)[10]和新型无绳被动声学测量系统(TOSIT)[11];国内有多频海底声学原位测试系统(MFISGAMS)[12]、海底沉积物声学性质原位测量系统(DISAMS)[13]、基于液压驱动压入的海底沉积物声学原位测量系统(HSISAMS)[14]、便携式海底沉积物声学原位测量系统[15]、海底原位声学测量同步采样器[16]和压载式海底沉积物声学原位测量系统(BISAMS)[17]等。由于海底沉积物声学原位测量以测量站位为主,难以研究海底沉积物温度、深度、盐度等因素变化对海底沉积物声学特性测量结果的影响,因此,在实验室建立海底沉积物声学测量系统,通过模拟原位声学特性测量过程中影响因素的变化,从而系统性、针对性研究海底沉积物组成类型和环境状态对其声学特性测量的影响。
本研究通过设计一种海底原位分层声学测量模拟装置,并在实验室建立小型海底模拟系统,对声学测量装置进行分层测量标定,为压入式海底原位声学测量装置提供一种在实验室模拟环境下进行性能测试的技术,并验证原位声学测量装置测量特性;此外,该装置还可用于模拟不同类型海底沉积物分层状态的声学特性测量研究。
1 装置测量原理
在测量过程中,由于声学测量探杆压入方式的不同,可分为定位测量和连续测量两种测量方式。定位测量如图1(A)所示,将声学测量探杆压入到预定的海底沉积物层中固定不动,通过控制温度、盐度、深度等,研究不同类型海底沉积物在不同海底沉积层随环境变化的声学特性;连续测量如图1(B)所示,声学测量探杆以匀速缓慢压入待测样品中,声学测量探杆匀速下降的同时以设定的时间间隔进行声学特性测量,通过声学特性的差异来反演样品中所含海底沉积物的类型和分层。

图1 分层测量原理示意Fig.1 Layered measurement principle
1.1 声速测量原理
声学探杆的分布根据差距测量法[18]原理设计(图2),声波从声学发射探杆E1传播到声学接收探杆R1、R2的距离分别为L1、L2,时间分别为t1、t2,故声波在样品中的传播速度Cp(m/s)为
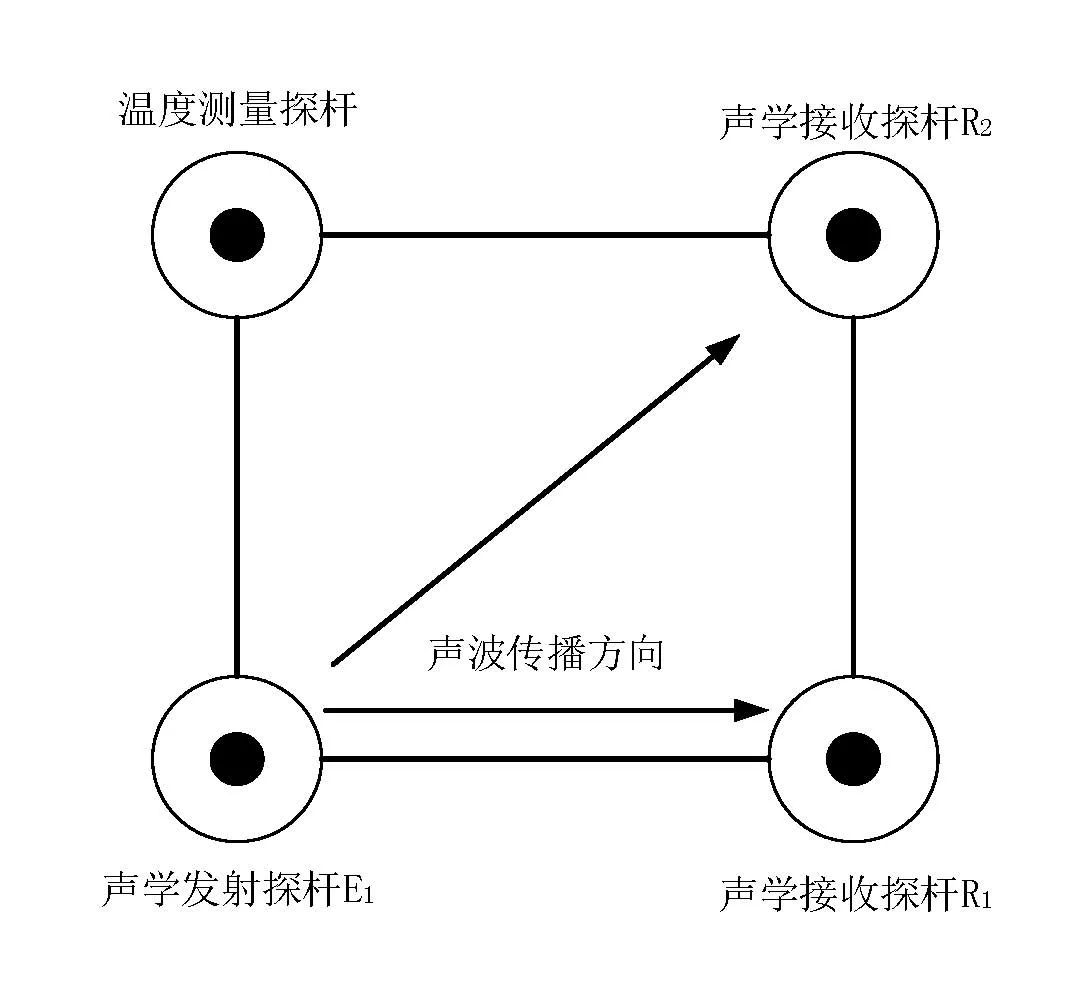
图2 声学测量原理示意Fig.2 Acoustic measurement principle
其中,ΔL为声学发射探杆E1到声学接收探杆R1、R2的距离差,Δt为声波传播时间差。
1.2 声衰减系数测量原理
声波在海底沉积物中的衰减包括扩散衰减、吸收衰减和散射衰减三部分[19],海底沉积物声衰减系数主要为海底沉积物对声波的吸收衰减和散射衰减之和。在短距离测量中,海水对声波的吸收衰减和散射衰减相对于扩散衰减很小,可忽略不计。当声波传播距离相同时,海底沉积物中的扩散衰减与海水中扩散衰减基本相同,在测量到的海底沉积物总声衰减中减去扩散衰减,从而得到海底沉积物声衰减。海水的扩散衰减系数和海底沉积物声衰减系数计算公式分别如下:
其中,αw为海水扩散衰减系数(dB/m),αs为海底沉积物声衰减系数(dB/m);Aw1、Aw2是介质为海水时,近、远两声学探杆接收信号在频域中的声波主频信号振幅(V);As1、As2是介质为海底沉积物时,近、远两声学探杆接收信号在频域中的声波主频信号振幅(V)。
2 装置结构组成设计
原位分层声学测量模拟装置由分层运动控制单元、声学测量单元和计算机控制单元三部分组成[20],结构示意如图3。
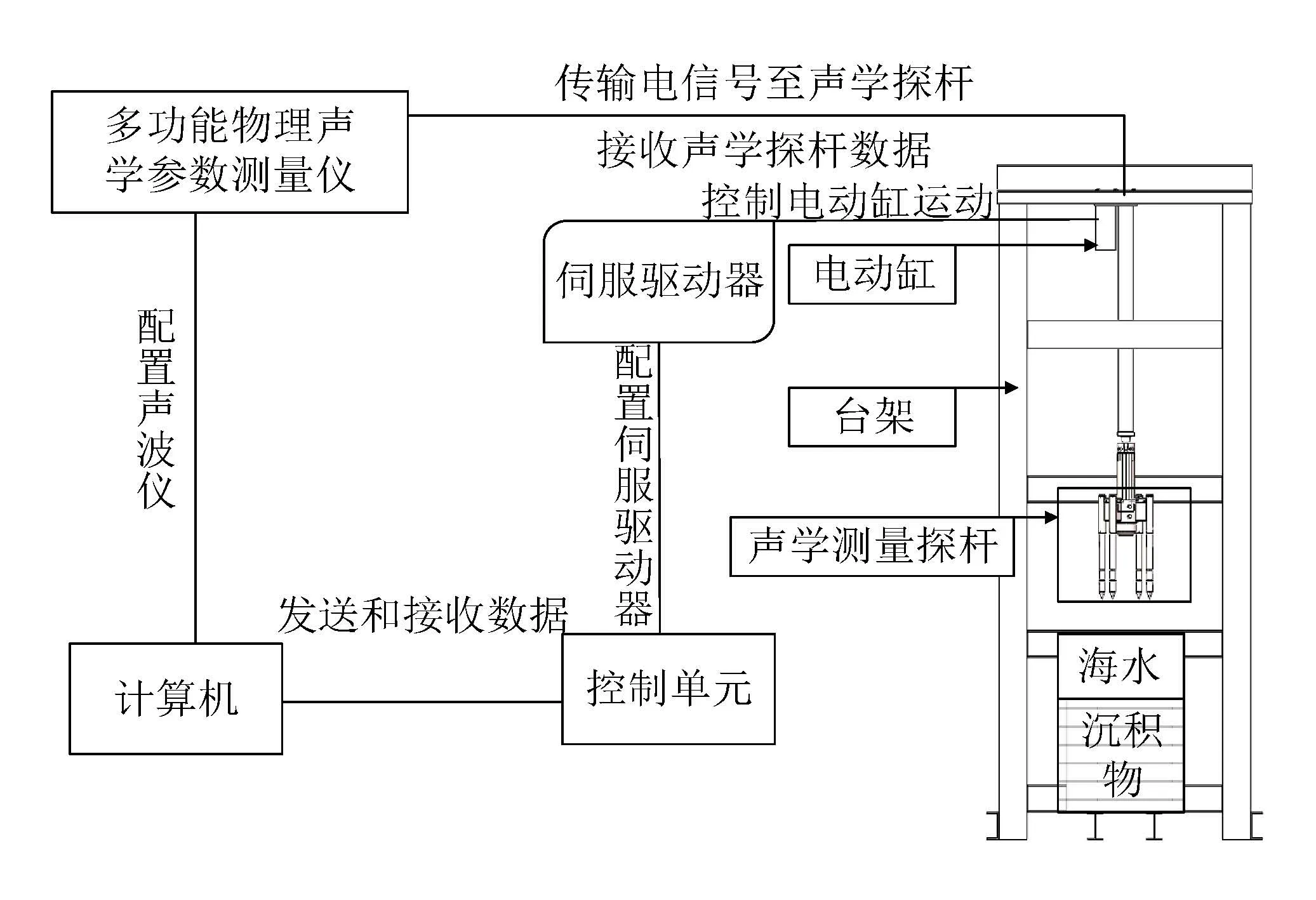
图3 声学测量装置的结构示意Fig.3 Structure of the acoustic measuring device
2.1 分层运动控制单元的组成结构
分层运动控制单元由台架、控制单元、拉绳式位移传感器和电动缸组成(图3)。台架承载电动缸以及电动缸连接的声学测量探杆、放置样品桶。电动缸的主要参数为有效行程1 m、运动速度范围为0.01~0.10 m/s。控制单元控制电动缸的启停,拉绳式位移传感器测量声学测量探杆的位移距离。将电动缸倒挂在定制台架上,通过电动缸的运动使声学测量探杆能够精确地按照设定速度下降到所需位置,不仅满足分层测量的要求,而且能进行海水和海底沉积物的连续测量。
2.2 声学测量单元的组成结构
声学测量单元由声波仪、声学测量探杆和温度探杆组成。声波仪实现声波激励信号的发出、放大,以及声波接收信号的接收、放大和储存,可以通过网络接口对测量参数进行设置和控制,以及上传测量数据进行显示、处理和分析。声学测量探杆由一根主频为50 kHz 的声学发射探杆和两根主频为50 kHz 的声学接收探杆组成,分别安装于声学测量探杆的三个顶点处,能够测量海水和海底沉积物的声速和声衰减系数。温度探杆由上、下杆套和温度传感器组成,温度探杆传感器与声学探杆换能器安装在同一水平面上,可获得同一测量层的温度用于标定和后续研究。
2.3 计算机控制单元的设计
计算机控制单元是通过计算机通讯界面来实现。界面分状态显示和连接控制区域(A区)和监测显示区域和控制区域(B 区)。A 区可实现装置状态显示、声波仪连接控制和控制单元连接控制功能;B区可实现海底环境物理量监测,装置运动状态测控和声波仪控制功能。计算机接收到各类的传感器数据,包括海水温度、声学测量探杆下沉深度、离海底沉积物高度三类数据,可直观显示在海底环境状态监测标签页中。在运动状态显示和控制标签页,可以直接配置声学测量探杆的运动速度与位移量,由计算机将指令下达至控制单元,再由控制单元控制电动缸驱动声学测量探杆运动。在声波仪控制标签页中,可以配置声波激励信号,包括采样频率、激励波形、测量频率、发射电压等参数,控制声波信号的发射与接收,直观显示接收到的声波信号波形,并把测量数据保存到计算机中。
3 分层测量标定与实验
海底原位分层声学测量模拟装置如图4 所示,其中,在尺寸为直径400 mm×高950 mm 的样品桶中建立小型海底模拟系统,分为200 mm的底层海水层、250 mm 的粉砂质黏土层和350 mm 的粉砂质砂层。海底沉积物来源于南海采集到的海底原状样品排气重塑而成,重塑后粉砂质黏土的黏土质量分数为76.68%,孔隙度为71.34%,湿密度为1.46 g/cm3;粉砂质砂的含砂质量分数为80.99%,孔隙度为36.73%,湿密度为1.84 g/cm3。
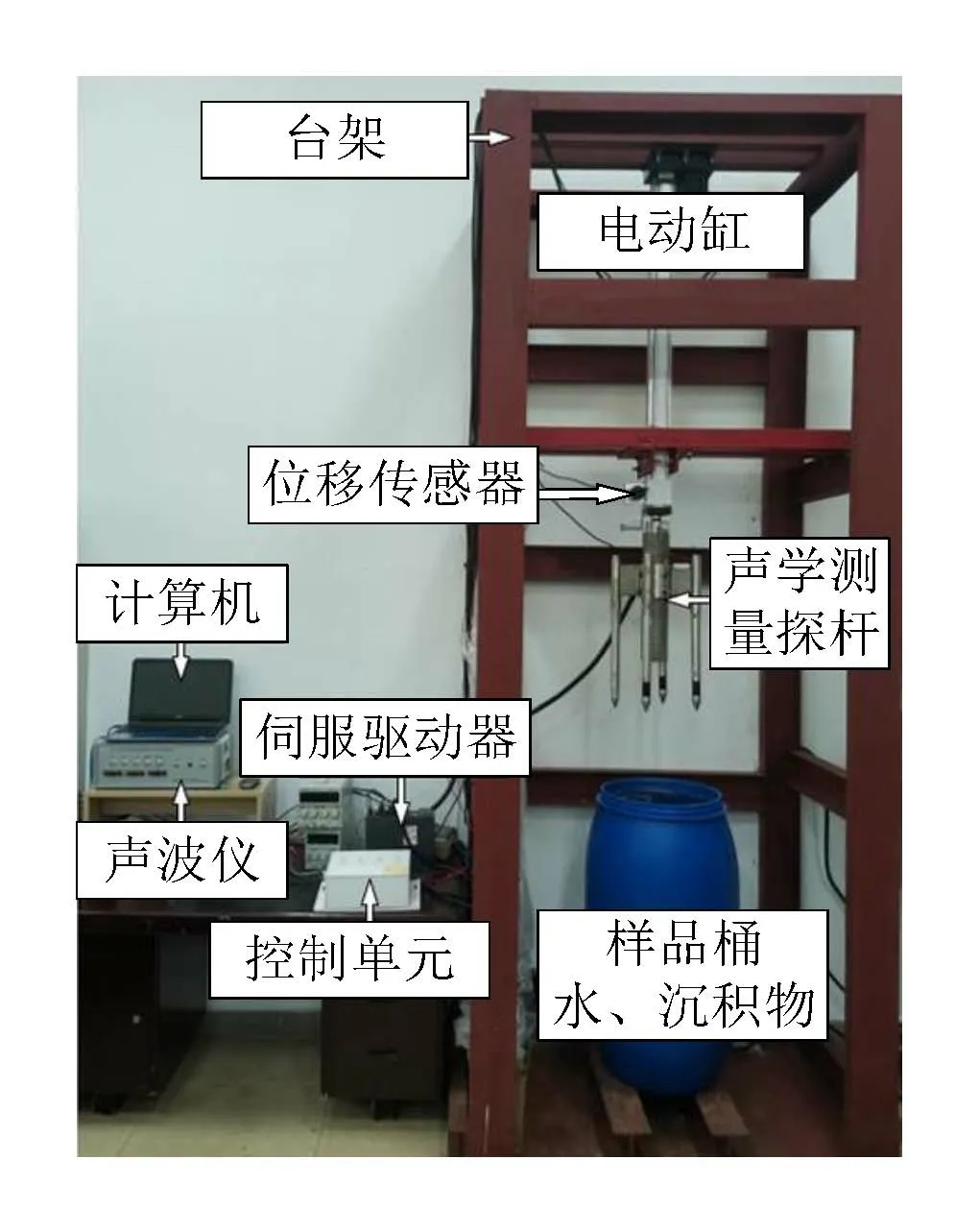
图4 声学测量模拟装置Fig.4 Acoustic measuring device
3.1 分层运动控制实验
声学测量探杆运动控制精度测试,将声学测量探杆的运动距离定为实验的设定位移,在发送端表现为脉冲数,进行3个竖直的运动距离测试,每个距离设定2个位移速度,实验结果见表1。测试结果显示,最大行程误差为0.50%,最大速度误差为2.00%,声学测量探杆运动控制精度较高,满足系统实验运动要求。
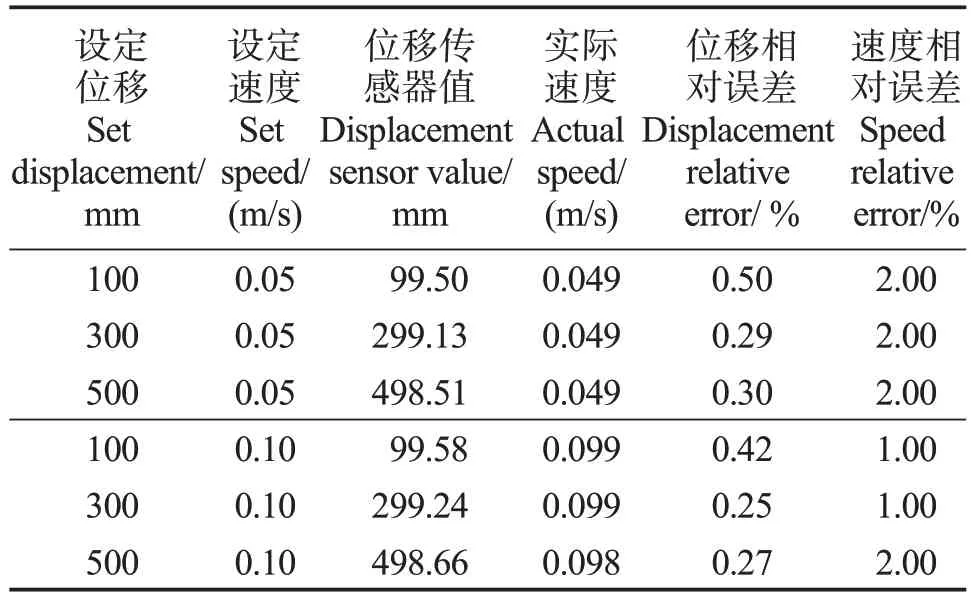
表1 运动控制精度测试数据Table 1 Motion control accuracy test data
3.2 水中分层声学测量标定实验
水中分层声学测量标定实验是标定出声学测量探杆的距离差ΔL和海水扩散衰减系数。由于声波换能器位于声学发射探杆和声学接收探杆中,如果用游标卡尺等测量工具对L1、L2进行测量并不能准确获得换能器的发射中心与接收中心的距离,会产生较大的误差,难以获得准确的距离差ΔL。因此,在海底沉积物声学测量之前需要在水中对换能器的发射中心与接收中心的距离进行标定,以获得准确的距离差ΔL。读取声波信号到达近、远声学接收探杆的时间差Δt,将理论声速CT代入公式(1)计算出距离差ΔL,获得远、近两杆在频域上的振幅。根据公示(2)计算出海水扩散衰减系数,测量数据如表2所示。水中理论声速CT用Mackenzie公式[21]计算如下:
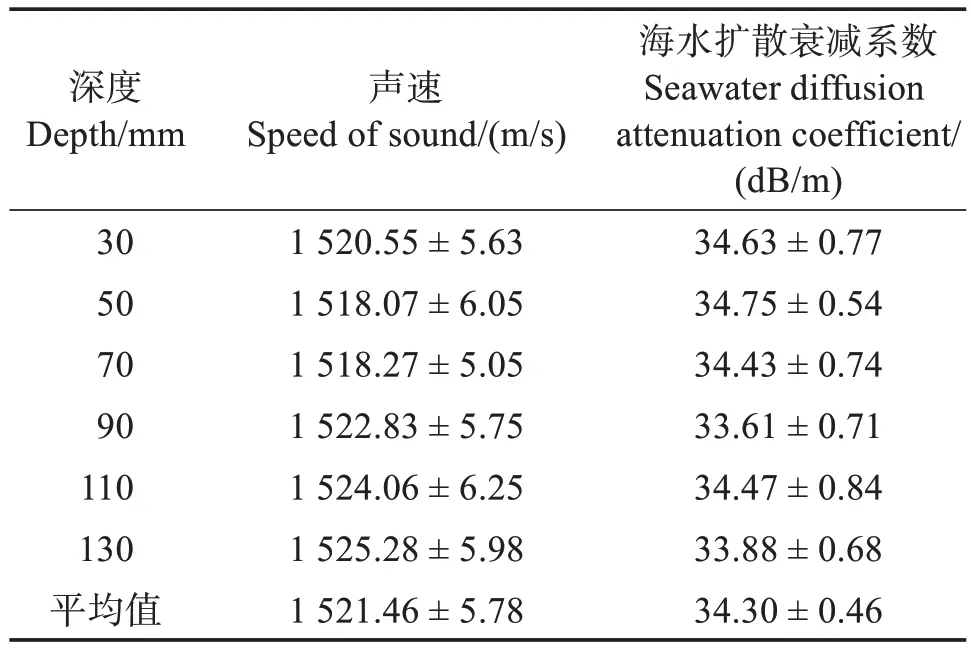
表2 水中分层测量实验数据Table 2 Experimental data of layered measurement in water
其中,T代表样品的温度(℃);S代表样品的盐度(‰);D代表实验深度(m)。
将声学测量探杆压入到水层30、50、70、90、110、130 mm 处,每处测量5 次,温度探杆测量得到水温为20.3 ℃,盐度计测量得到水盐度为25‰。由公式(4)计算得出水中理论声速为1 521.46 m/s,在时域中读出声波到达近、远两声学接收探杆的平均时间差Δt为50.70 μs,用理论声速乘以时间差,得到ΔL值为77.14 mm。
表2 显示,由于声波传播的边界影响以及测量装置系统特性影响,导致声速的测量值存在微小差异,但小于0.50%;同时,根据公式(2)计算得到装置在水中平均扩散衰减系数为(34.30±0.46)dB/m。
3.3 海底原位沉积物分层模拟声学测量实验
原位分层模拟声学测量实验由定位测量和连续测量两种实验组成,验证海底原位测量过程中的静态测量和连续运动测量。在定位测量实验中,控制声学测量探杆精确压入到海水层、粉砂质黏土层、粉砂质砂层100 mm深处,每一层进行5次测量;在连续测量实验中,控制声学测量探杆以0.04 m/s的速度压入到介质层中,声波仪设置声波发射频率为1 s-1。定位测量实验的两根声学接收探杆在海水层、粉砂质黏土层和粉砂质砂层接收信号如图5 所示,其频谱如图6所示。
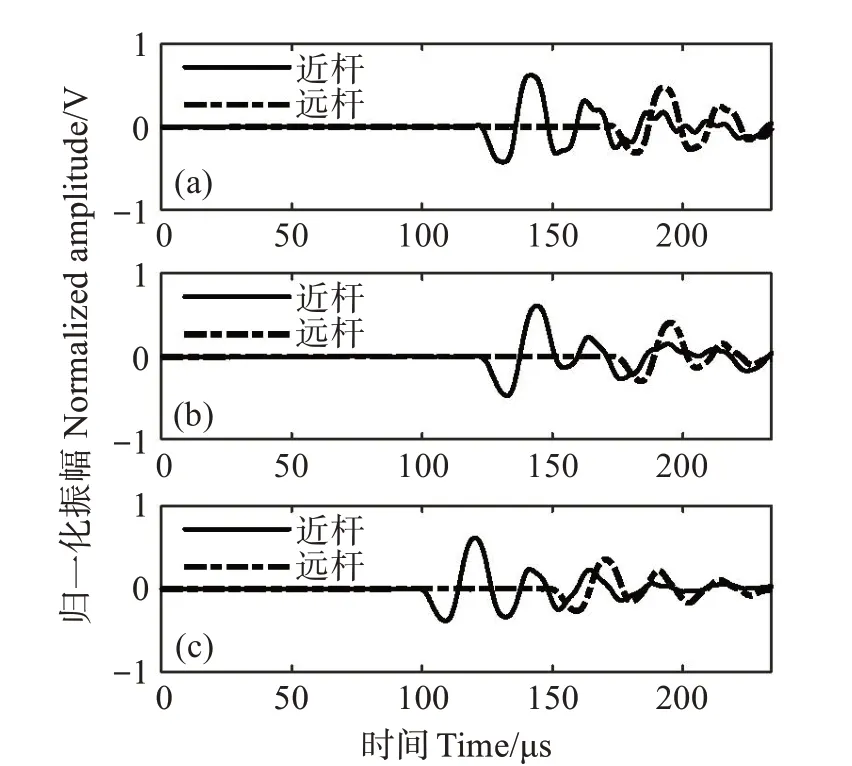
图5 不同层远、近杆声波信号Fig.5 Acoustic signals from far and near rods at different layers
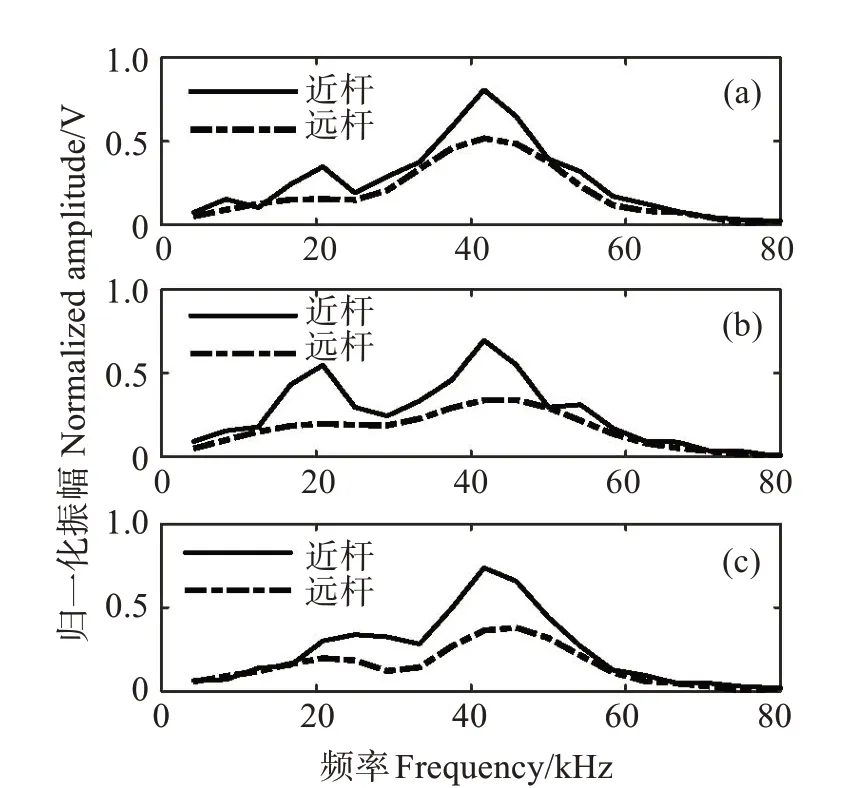
图6 不同层远、近杆声波信号频谱Fig.6 Spectra of acoustic signals from far and near rods at different layers
海底原位声学测量头声学测量特性研究[22]表明,在时域中,采用互相关法能有效处理声学信号计算声速;在频域中,使用主频特征法能有效计算声衰减系数。通过对接收声波信号的互相关分析,获得两根声学接收探杆接收到发射声波的时间差,代入公式(1)计算出声波在海水层、粉砂质黏土层和粉砂质砂层的声速;通过读取两根接收探杆频域中主频的振幅,代入公式(2)和公式(3)分别计算出海水层的扩散衰减系数、粉砂质黏土层和粉砂质砂层的声衰减系数,计算结果见表3。

表3 沉积物测量实验数据Table 3 Sediment measurement experimental data
表3显示,定位测量和连续测量结果十分接近。两种实验中粉砂质黏土层平均声速比为0.976,粉砂质砂层平均声速比为1.065,符合海底沉积物的孔隙度增大而声速减小,含砂量越高而声速越大的规律[23],符合东海航次对应海底沉积物类型的原位测量声速比[24](砂质为主的范围1.026~1.070,黏土质为主的范围0.974~0.985);按照地声结构分层[25]分别对应低声速表面-低声速层海底和高声速表面-高声速层海底。阚光明等[26]测得南黄海中部海域沉积物的声速范围为1 433.7~1 667.6 m/s,声衰减系数范围为7.6~33.4 dB/m,沉积物孔隙度范围为38.1%~69.1%;王景强[27]测得胶州湾海底表层沉积物声速值范围为1 465~1 675 m/s,声衰减系数范围为1.7~60.2 dB/m,沉积物中平均含砂质量分数、粉砂质量分数、黏土质量分数分别为25.4%、54.9%、19.7%。不同海域中不同海底沉积物类型的声学和物理参数变化范围较大,但整体具有相似性。原位分层模拟声学测量实验结果与其他海域的同种类型的海底沉积物所测声学特性范围相接近,表明本装置可以实现海底沉积物分层测量。
为验证海底原位分层声学测量模拟装置测量结果的准确性,用取样管将重塑后的沉积物从样品桶中取出,采用海底沉积物岩芯横向声学测量系统[28]对取样管中沉积物进行分层测量。
将发射换能器和接收换能器固定在粉砂质黏土层和粉砂质砂层100 mm 深处,每一位置进行5次声学特性测量。海底原位分层声学测量模拟装置测量结果与海底沉积物岩芯横向声学测量系统测量结果如图7 所示,定位测量法与横向测量法对两种样品声速和声衰减的测量值误差最大分别为0.37%和4.57%,说明该装置能有效测量海底沉积物声学特性。
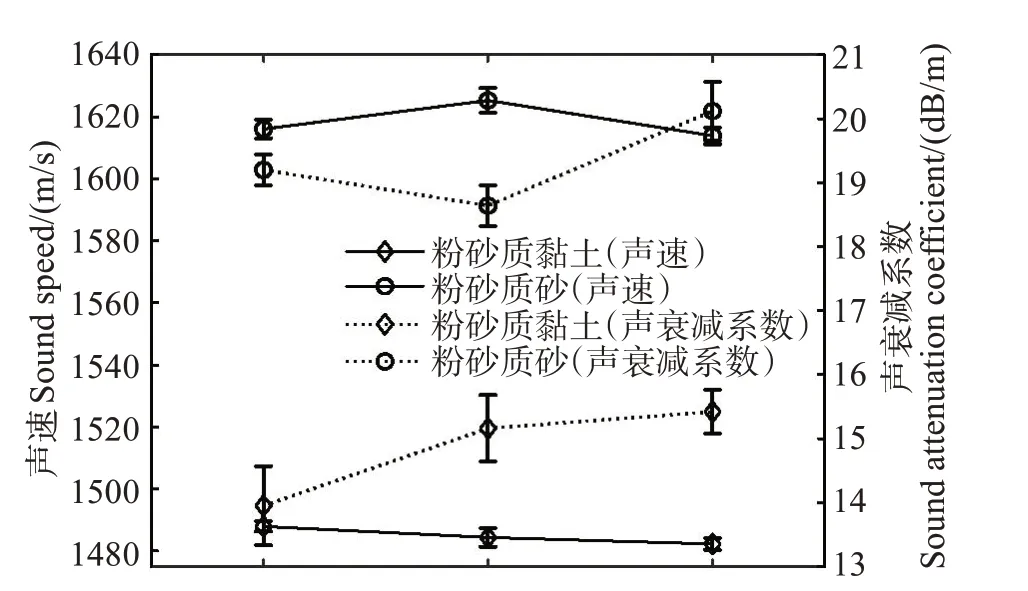
图7 不同测量方式的声学特性测量结果对比Fig.7 Comparison of acoustic properties measurement results from different measurement methods
4 结论
为研究不同环境条件下海底沉积物声学特性的变化机制和原位测量装置的测量特性,设计一种海底原位分层声学测量模拟装置,通过控制电动缸准确推动声学测量探杆运动到不同深度,实现海底沉积物分层声学特性测量。基于水中分层声学测量标定实验和海底原位分层模拟声学测量实验,得到以下结论:
1)水中标定测量,得到声学测量探杆的校正距离差为77.14 mm,声波平均扩散衰减系数为(34.81 ±0.46)dB/m。
2)定位测量和连续测量两种方式得到海水和海底沉积物的声学特性差异较小,且对粉砂质黏土和粉砂质砂的测量结果与岩芯横向声学测量法测得的声学特性具有一致性,表明本装置测量具有可靠性。
3)海底原位分层声学测量模拟装置可以推动声学测量探杆压入到物理性质不同的海底沉积物层中,实现底层海水和海底沉积物的分层声学特性测量。
感谢中国自然资源部第一海洋研究所阚光明研究员和中国科学院南海海洋研究所田雨杭博士提供的宝贵建议和帮助。部分数据得到“中国开放式科学考察邮轮(航次编号:NORC2021-02、NORC2021-301)”的国家自然科学基金船舶分时计划资助。
