领航者-跟随者集群系统的队形优化与控制
2024-01-26陈明飞王晓东
陈明飞 王晓东 宋 勋 王 东 王 伟
随着人工智能、多传感器信息融合和网络通信等相关技术的高速发展,由无人机和无人车等智能设备组成的集群系统作为未来智能化战场环境下的新型武器,受到了中美等军事强国的高度关注.相比于单一个体,集群系统通过信息传递实现个体间相互合作,形成优势互补,并借助数量庞大的优势在军事对抗中占据主导地位.编队控制作为集群系统的重要研究课题之一,已广泛应用于军事领域,如多架低成本的无人机形成固定的队形以保护高价值的有人机免受敌方攻击.相较于集中式控制,基于多智能体架构的分布式控制具有去中心化、良好的可扩展性和鲁棒性等特点,已成为国内外的研究热点.
随着多智能体系统一致性理论发展,分布式编队控制技术取得了丰富的研究成果[1-12].文献[1]设计基于相对状态反馈的控制器,通过局部信息传递,跟随者与领航者之间保持固定的距离实现编队控制.文献[3]考虑了通信链路故障下的编队问题,结合李雅普诺夫稳定性理论和线性矩阵不等式技术,证明设计的控制系统是稳定的.针对无人机系统存在未知扰动的情况,文献[5]基于有限时间控制理论设计分布式自适应控制协议,减少了跟踪误差.文献[6]考虑了固定翼无人机集群在航行过程中存在速度约束和风速干扰的情况,设计僚机跟随长机的分布式控制律,实现编队跟踪控制.针对固定有向通信网络和时变有向通信网络两种情况,文献[10]设计基于观测器的分布式控制协议,给出时变编队的充分条件.文献[11-12]分别研究了高阶同构系统和高阶异构系统的有限时间编队跟踪问题.
在上述提到的集群编队工作[1-12]中,研究者根据领航者与跟随者之间的相对位置和姿态等信息,通过设计相应的控制协议,使得运动轨迹满足预先设定的偏移函数.然而,上述文献并没有结合特定实际的背景衡量队形的收益,也没有判断集群的队形是否为最优的.为了获得集群系统中个体的最优位置,文献[13]基于博弈论研究了四旋翼无人机集群的最优位置问题.但每架无人机在相互竞争的场景下仅衡量自身的收益,获得的个体最优位置并不意味着整个集群系统是最优的.为了充分发挥集群协作的优势,文献[14]将静态的队形优化问题建模为分布式聚合优化问题: 每个智能体有一个与自身位置和集群中心位置相关的目标函数,通过局部信息交互衡量集群系统的整体收益,合作构建最优队形.在实际的跟随者形成最优队形环绕在领航者周围并抵御入侵者攻击的情形下,跟随者的目标函数会随着入侵者位置和领航者位置动态变化.因此,关于时变目标函数的领航者-跟随者队形优化问题亟待进一步研究.
受上述工作启发,本文考虑了领航者-跟随者集群系统的队形优化问题,每个跟随者不仅需要保护领航者,还存在威慑入侵者和避障等任务,并基于多智能体分布式优化理论,将上述问题建模为在线聚合优化问题.通过分布式搜寻全局目标函数的极小值优化领航者-跟随者的队形.主要创新点如下:
1)结合梯度下降法和投影算子,提出了一种固定步长的离散时间分布式在线算法.基于矩阵放缩方法,证明设计的算法动态遗憾界与常数项和在线时间相关.
2)结合动态平均一致性协议和梯度追踪方法,实现分布式估计集群系统的中心位置,充分保护了跟随者的隐私.
1 预备知识与问题描述
1.1 符号说明
首先介绍本文使用的符号.
Rn表示n 维实向量空间.1n和0n分别是所有元素均为1 和0 的n 维列向量.定义△g 是函数g 的梯度以及列向量.表示矩阵A 和矩阵B 的克罗内克积.定义为欧几里得范数.对于任意的矩阵A 和向量a,则有.表示矩阵A 的谱半径.
1.2 图论
1.3 问题描述
考虑领航者-跟随者集群系统的队形优化问题,其中,由n 个跟随者旨在形成最优队形保护领航者免受入侵者攻击.本文不考虑底层姿态和机动控制,仅将领航者和跟随者看作运动的质点,采用如下模型描述跟随者的运动
在上述问题中,跟随者i 存在如下的局部目标函数[14-15]:
注2 在集群编队问题[5-7]中,跟随者xi需要与领航者x0之间保持编队偏移量di,即.然而,编队偏移函数di往往是根据先验知识设定的.如果偏移函数设定较差,则难以充分发挥集群系统中智能体的互补优势.在问题(2)中,通过求解在线聚合优化问题寻找最优决策,跟随者形成最优队形保护领航者免受入侵者攻击.
注3 不同于分布式优化问题[16],分布式聚合优化问题(2)局部目标函数fi不仅与局部决策xi相关,还依赖于全局聚合信息.此外,在聚合博弈[17]问题中,所有参与者以非合作的方式寻找纳什均衡点.而问题(2)中跟随者以合作的方式最小化函数,形成最优队形.
为了方便后续分析,给出如下假设.
本文旨在设计分布式算法求解在线聚合优化问题(2)的极小值,进而确定领航者-跟随者集群系统的最优队形.
2 算法设计与收敛性分析
2.1 算法设计
根据式(1)、式(4)~式(6),设计的算法的紧凑形式如下:
其中,
2.2 收敛性分析
在分析算法(7)的收敛性之前,给出后续证明中用到的引理.
引理2[14]在假设2~5 的前提下,对所有的,则有
引理3[18]假定是一个非负不可约矩阵且对角元素满足.矩阵M 的谱半径的充要条件是.
引理4[14]在假设1 的前提下,存在正数满足
下面的引理给出了核心的矩阵不等式关系.
引理6 在假设1~5 的前提下,算法(7)的轨迹使得下列不等式成立:
如果步长α 满足
整理式(10),式(13)和式(16)可得式(8).根据引理3,计算行列式
结合式(18)和式(19),可得式(9).根据文献[20]中定理6.2.24,由于矩阵M 对应的有向图是强连通的,则M 不可约矩阵.由引理3 可得矩阵M 谱半径.证毕.
下面的定理描述了算法(5)动态遗憾界.
定理1 假设1~5 成立.如果步长α 满足式(9),则动态遗憾界满足
证明: 首先,递归迭代式(8)可得
对式(21)两边同时取欧几里得范数可得
根据式(3),动态遗憾界为
因此,可得动态遗憾界RT式(20).证毕.
,且步长α 满足式(9),则动态平均遗憾界满足
对式(25)两边同时取2 范数可得
由式(23)和式(26)可得
同理,动态遗憾界为
则平均动态遗憾界为
因此,可得平均动态遗憾界式(24).证毕.
注7 文献[14]将集群系统的队形优化问题建模为分布式聚合优化问题,通过设计离线分布式算法求解全局函数极小值.然而,文献[14]的算法无法处理局部目标函数随时间变化的情况.因此,本文将离线的聚合优化问题延伸到在线情形,利用矩阵放缩方法分析算法的动态遗憾界.此外,采用动态平均一致性方法,实现分布式估计集群系统的中心位置和平均梯度,充分保护了跟随者的隐私.
3 仿真算例
考虑由1 个领航者和4 个跟随者组成的集群系统的队形优化问题,跟随者相应的通讯网络如图1所示.其中,跟随者形成最优队形保护领航者免受入侵者攻击.在仿真中,仅考虑二维平面的运动轨迹(可直接扩展到多维空间),设定运动区域约束为,安全距离,权重系数,,障碍物d0是以为圆心,半径为0.4 的圆.假定入侵者从运动区域外围向领航者逼近,设定领航者和入侵者的运动轨迹为

图1 集群系统的通讯网络Fig.1 The communication network of the swarm system
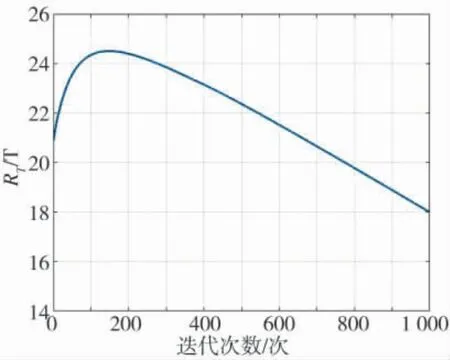
图2 算法(5)的平均动态遗憾界Fig.2 The evolutions of the average dynamic regret of algorithm(5)
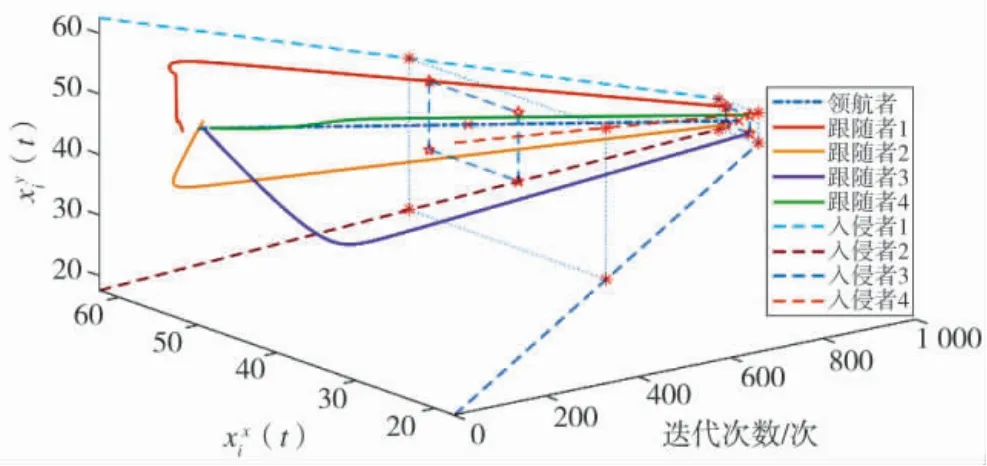
图3 集群系统的运动的轨迹Fig.3 Movement trajectories of the swarm system
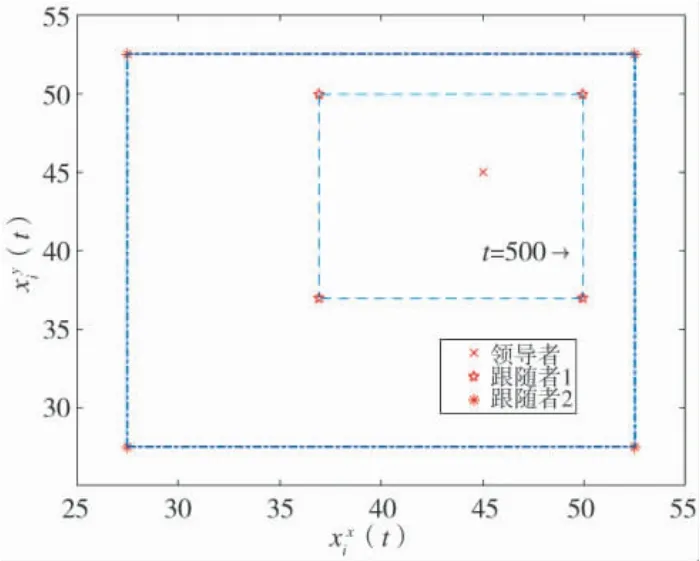
图4 t=500 时集群系统的位置Fig.4 Locations of the swarm system at t=500

图5 t=1 000 时集群系统的位置Fig.5 Locations of the swarm system at t=1 000
4 结论
本文提出了一个固定步长的离散时间算法解决分布式在线聚合优化问题.结合动态平均一致性协议和矩阵放缩方法,证明跟随者轨迹的动态遗憾界与常数项和在线时间相关.设计的算法为领航者-跟随者集群系统的队形优化问题提供了理论依据,具有良好的应用价值.