改进的NLCS星弹双基SAR俯冲前视成像算法*
2024-01-24席子瑞段崇棣左伟华李财品李东涛
席子瑞,段崇棣,左伟华,李财品,李东涛
(空间电子信息技术研究院,西安 710100)
0 引 言
合成孔径雷达(Synthetic Aperture Radar,SAR)具有一定的穿透能力,可以全天候全天时工作[1],已广泛应用于军用和民用领域。卫星作为发射源在一定的轨道高度上运行,具有抗打击能力强、波束覆盖范围广的优点;导弹作为接收端具有高分辨率识别的优势[2]。星弹双基地系统结合了星载SAR和弹载SAR的优点,可以将星载SAR的大范围覆盖、高安全性与弹载SAR的高分辨率、高机动性相结合,有效获取包含背景在内的场景目标,提高打击目标的能力,实现察打一体化[3]。
在导弹俯冲下降阶段,由于导弹存在加速度,其速度大小和方向在不停地变化,回波信号存在严重的距离-方位向耦合。另外,在目标前视的情况下,方位向存在着剧烈的空变性,这是星弹双基SAR面临的两大难题。一些改进的前视算法如 Omega-K[4]、CS[5](Chirp Scaling) 和RD(Range Doppler)[6]算法只适用于匀速且飞行轨迹平行的机载SAR实验,不适用于高机动性弹载SAR模型。BP[7](Back Projection)算法能够处理双基系统中高机动性移动平台,但算法的效率很低。文献[8]提出了一种改进的FFBP(Fast Factorized Back Projection)算法对弹载前视成像进行了实验仿真,获得良好的成像效果。文献[9]提出了改进的非线性变标(Nonlinear Chirp Scaling,NLCS)算法实现了对双基静态系统的高效处理,但是文中没有对方位向调频率进行具体分析和补偿,方位向聚焦受到影响。文献[10]将所提出的NLCS算法运用在匀速飞行但轨迹不平行的双基机载实验中,取得了良好的成像效果。文献[11]中对NLCS算法做进一步改进,对方位向调频率进行了补偿,完成了弹载单基SAR斜视成像。文献[12]提出了一种新型改进的NLCS算法,对固定发射站、弹载接收的双基前视模型进行仿真实验,方位向聚焦得到了改善。解决了距离-方位向耦合和方位空变问题。
本文针对星弹双基SAR俯冲阶段前视成像模型,对常规的NLCS算法进行改进,主要体现在二维频率域处理距离-方位耦合和对方位向多普勒调频率补偿操作。将改进的算法运用在新型星弹双基模型,方位向聚焦得到改善,解决了信号距离-方位向耦合和方位空变问题,实现了良好的成像效果。与其他算法进行成像结果和算法复杂度对比,结果验证了该算法的可行性与有效性。
1 星弹双基SAR俯冲段信号模型
星弹双基SAR俯冲段系统构型如图1所示。根据右手定则建立坐标系,卫星的初始坐标位于在轨坐标系中,由轨道六根数决定,计算前需要将卫星坐标转换至与导弹相同的本地坐标系中[13]。图中卫星坐标是已转换后的本地坐标,可直接参与计算。(xT,yT,zT)为卫星的初始坐标,vtx为卫星沿x轴方向的速度,vty为卫星沿y轴方向的速度。导弹的初始坐标为(0,yR,zR),vy为导弹沿y轴方向的初始速度,vz为导弹沿z轴方向的初始速度,ay为导弹沿y轴方向的加速度,az为导弹沿z轴方向的加速度,RT0为卫星到目标点的初始距离,RR0为导弹到目标点的初始距离,目标点的坐标为(x,y,z)。不考虑系统同步和卫星导弹运行过程中所导致双基构型发生变化引起目标电磁散射系数改变的问题[14],将其设为理想状态。

图1 星弹双基俯冲前视构型Fig.1 Forward-looking geometry configuration of spaceborne missile bistatic SAR
发射源为低轨卫星,在合成孔径时间内(设合成孔径时间为5 s),由于速度变化量比较小,可将其视为匀速运动。在俯冲下降段,导弹沿曲线做匀加速运动。用符号τ表示系统距离向时间(快时间),符号η表示方位向时间(慢时间)。假定系统初始时刻方位时间η为零,对地面上任一点目标其收发斜距历程用R(η)表示,将各个目标点信号回波的幅值设为理想情况,强度不随斜距大小变化,则地面上任一点星弹双基SAR回波信号可表示为
S(τ,η)=wr(τ-R(η)/c)wa(η-ηc)·
exp{-j2πfcR(η)/c}·
exp{jπKr(τ-R(η)/c)2}
(1)
式中:wr表示为距离向信号包络;wa表示为方位向信号包络;c代表光速;fc为信号载频;Kr为发射信号调频率;R(η)=RT(η)+RR(η),RT为卫星到目标点的瞬时距离,RR为导弹到目标点的瞬时距离,
(2)
分别将RT和RR在η=0处进行泰勒级数展开,可得
(3)
因为导弹处于俯冲阶段,这不同于飞机的匀速直线运动,具有二维加速度,速度和方向变化很快[15]。一阶到四阶项的距离徙动量很大,为了保证高精度成像效果,采用发射和接收斜距为四阶近似模型。
2 星弹双基SAR俯冲前视成像算法
假定卫星发射的是线性调频信号(Linear Frequency Modulation,LFM):
S1(τ,η)=wr(τ)wa(η)exp(j2πfcτ+jπkrτ2)
(4)
则回波信号表达式如式(1)所示。根据驻定相位定理(Principle of Stationary Phase,POSP)及菲涅尔积分对式(1)做距离向快时间傅里叶变换(Fast Fourier Transform,FFT),可得
(5)
由于导弹自身的加速度和前视成像等因素导致多普勒中心频率偏离,为了在后面二维频谱计算中二维向一一对应,需将频谱搬移到零频位置。根据式(6)可求得多普勒频率中心
(6)
(7)
在快时间频率和慢时间时域内,将H1与式(5)相乘得到校正结果:
(8)
然后对信号S21在距离频域方位时域作方位向FFT,采用级数反演的方法[16-17]可得回波信号二维频谱表达式为
S2(fr,fa)=wr(fr)wa(fa)exp[jφ(fr,fa)]
(9)
将φ(fr,fa)化简成在fr=0处的泰勒级数展开式如下:
(10)

H21=exp(-jφ1(fa)fr)
(11)
(12)
场景内任意点目标的回波信号经过距离徙动校正和距离脉冲压缩会变成方位向的一条竖直线。由于信号进行了距离徙动校正,对fr一次项进行了消除,为了确定成像场景距离向位置,乘以函数H23:
(13)
将式(9)与式(11)、(12)、(13)进行相乘再对距离向做逆快速傅里叶变换(Inverse Fast Fourier Transform,IFFT),可得信号S3。
3 方位向聚焦处理
不同于收发匀速或静止的双基构型,星弹双基系统信号回波经过距离脉冲压缩和距离徙动校正后,位于同一距离单元不同方位向的目标其多普勒调频率ka变化明显,不能视为一个常量。如果直接命方位中心的多普勒调频率构造方位向匹配滤波函数,对方位向进行脉冲压缩,则成像场景的边缘目标点将很难聚焦。所以在进行方位向压缩之前,必须对多普勒调频率沿方位向变化进行补偿。这里引入方位非线性变标算法,以改善方位向聚焦的深度和效果。
在多普勒调频率补偿和非线性变标操作之前,为了消除方位向3次、4次项的影响,需要在距离时间方位频率域中引入方位向3次、4次相位滤波,相位滤波函数H31和H32如下:
(14)
式中:A、B项为设定的未知参数,将在后面计算求得。用式(14)与信号S3相乘,可得

(15)
对式(15)采用驻定相位法,对方位向进行 IFFT可得

(16)
接下来对方位向多普勒调频率进行补偿,使得方位向每个目标点的多普勒调频率与场景中心多普勒调频率相等。根据非线性调频变标的思想,先构造一个函数H4与上式相乘,使其满足上述要求:
H4(η)=exp(jπl2η2+j2πl3η3+j2πl4η4)
(17)
将式(16)乘以式(17),接着再对其进行方位向FFT可得
(18)
φ(fa)按照fa和Δη的阶数项进行合并,可化简为

(19)
从式(19)中可以看出,第一项只包含方位向频率,在方位压缩时可直接构造共轭匹配滤波函数将其去除;第二项为方位频率一次项,包含目标成像方位向的位置信息,不能去除;其余项均包含方位频率和方位时间耦合项,若要对多普勒调频率ka进行补偿校正,使其值不随方位向位置变化而改变,则命c3,c4,c5,c6,c7这些项的系数为0。将所求的结果代回式(18),可得

(20)
式中:Br为信号脉冲带宽。从式(20)中可以看出,方位向频率fa的2次、3次、4次项系数均为常数,不再随方位向变化而变化,已完成补偿校正。所以,方位向可以直接进行压缩,即方位向匹配滤波函数为
(21)
将式(20)与式(21)相乘,可得

(22)
再对方位向做IFFT可得最终SAR成像图像。整个算法流程如图2所示。
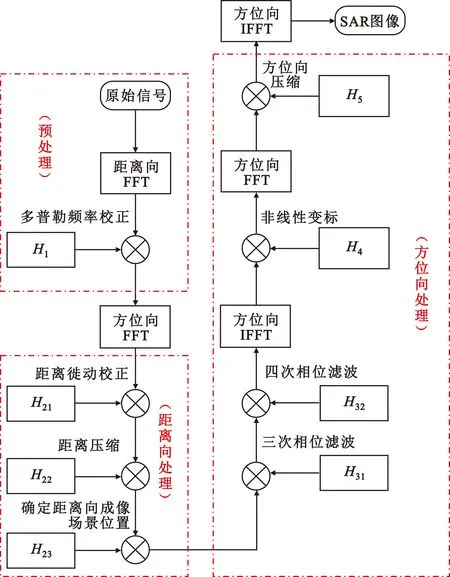
图2 算法流程Fig.2 Flow chart of the proposed algorithm
4 算法计算量分析
从图2中可以看出,该算法运算量的增加主要来自方位向非线性变标操作,包括一次FFT、一次IFFT和4次相位点乘(流程图方位向处理部分所示)。根据文献[18]可得,一次复数相位相乘的计算量为6次浮点运算量(Floating Point Operations per Second,FLOPS),一次N点FFT或一次N点IFFT的计算量为5Nlb(N)次FLOPS,仿真实验中距离向采样点数为Nfast=2 048,方位向采样点数为Nslow=512,距离压缩后选择的输出点数为Nr=1 856,可计算出在方位非线性操作后所增加的浮点运算量为
ΔQ=2×5NrNslowlb(Nslow)+4×6NrNslow=
1.083×108FLOPS
虽然该算法运算量相比常规算法略有增加,但是方位向聚焦有明显的改善,图像效果更好。下面对文献[6]中改进的RD算法和文献[10]中改进的NLCS算法进行计算量分析对比,设定插值核值为6。文献[6]中算法的复杂度计算量为
Q1=20NslowNrlb(Nr)+20NslowNrlbNslow+
30NaNr+2(2Nk-1)NaNr=
4.268 241 71×108FLOPS
文献[10]中算法复杂度计算量为
Q2=10NaNrlb(Nr)+10NaNrlb(Nslow)+
12NaNr+2(2Nk-1)NaNr=
2.210 142 62×108FLOPS
本文所提算法复杂度计算量为
Q=2×5NrNslowlb(Nr)+
4×5NrNslowlb(Nslow)+8×6NrNslow=
3.198×108FLOPS
可以看出,本文所提算法计算量比文献[10]中NLCS算法略复杂,比文献[6]中的RD算法更高效,而且本文算法没有耗时的插值操作,其处理效率更高。
5 仿真结果分析
成像区域如图3所示,成像目标点为9个,相邻点之间沿x轴方向间距100 m,沿y轴方向间距150 m,T1为场景中心目标点,T5为方位空变最严重的边缘点。仿真采用的系统参数如表1所示。

图3 场景区域目标点Fig.3 The target points of scene area
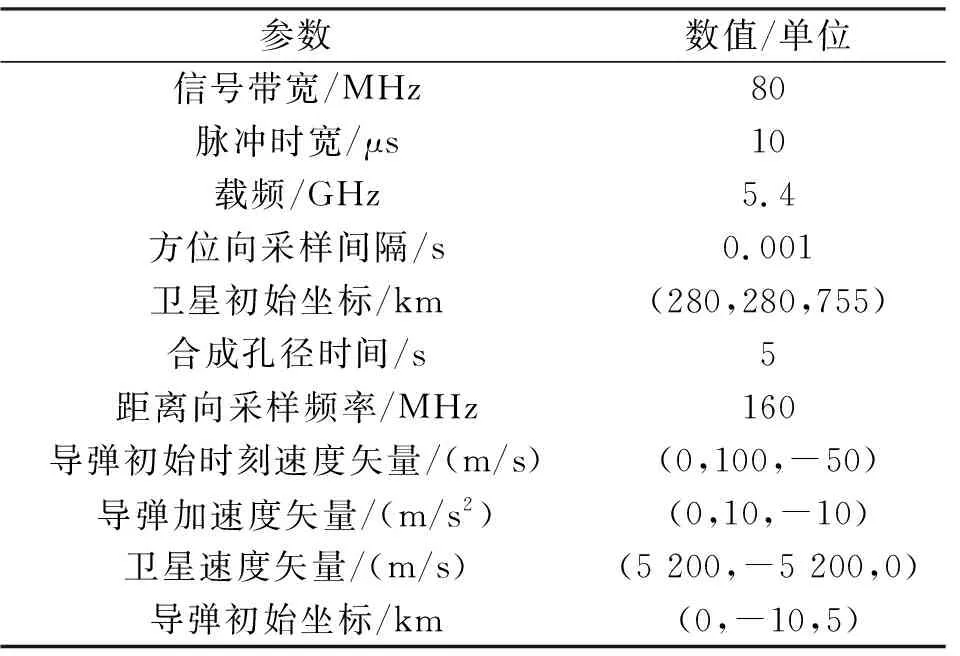
表1 星弹双基SAR系统参数Tab.1 Simulation experimental parameters of spaceborne missile bistatic SAR
点目标成像仿真结果如图4(a)所示。由于导弹前视成像的影响,距离向和方位向存在一定的几何畸变,与真实目标位置不一致。对其进行畸变校正后的结果如图4(b)所示。
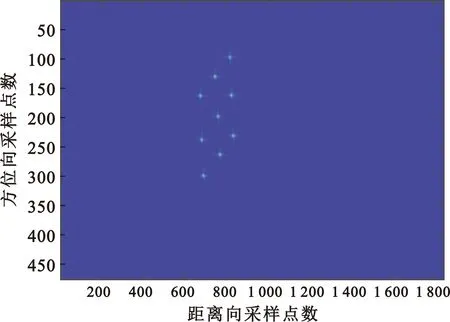
(a)畸形校正前
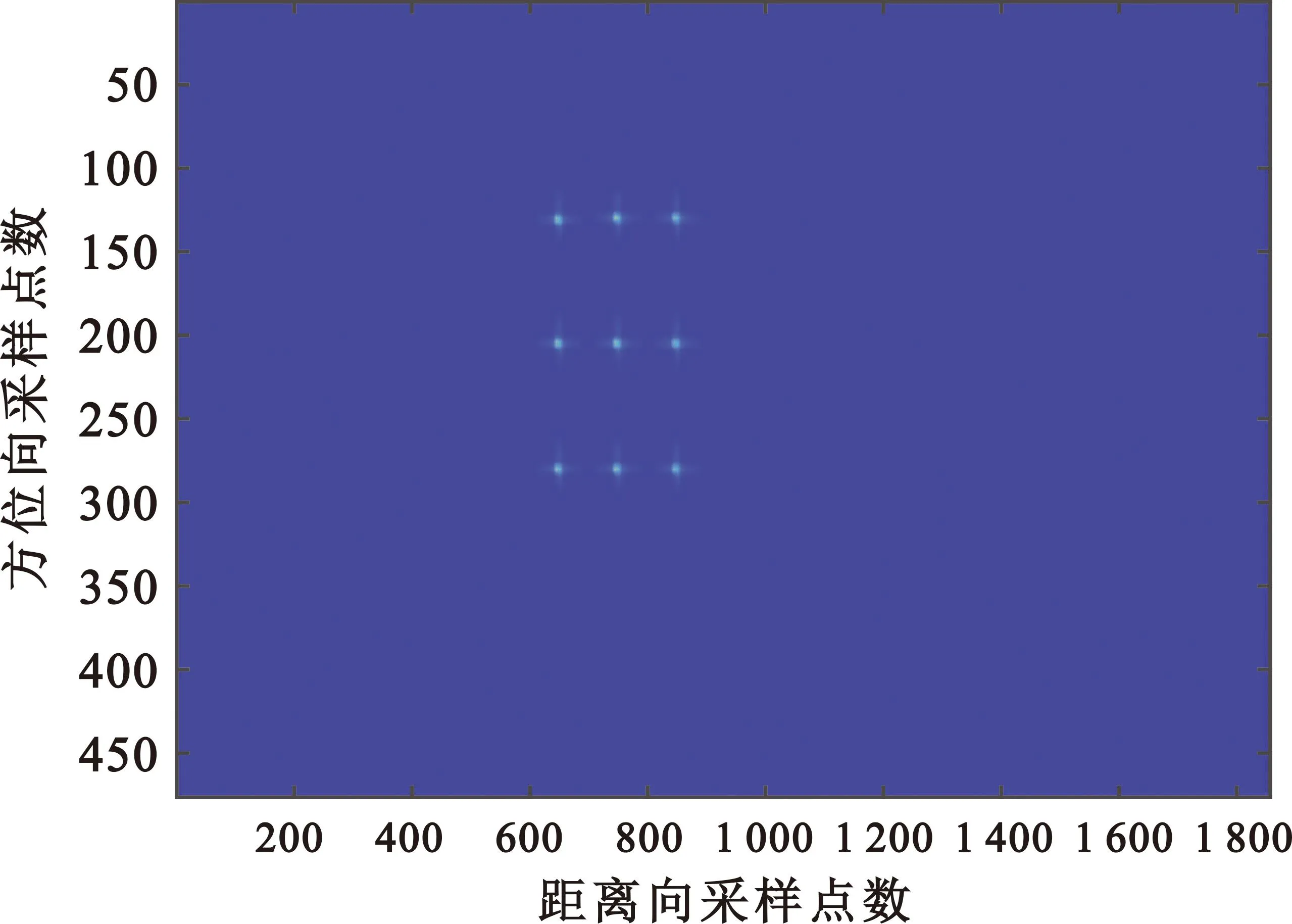
(b)畸形校正后图4 点目标仿真结果Fig.4 Simulation results of point targets
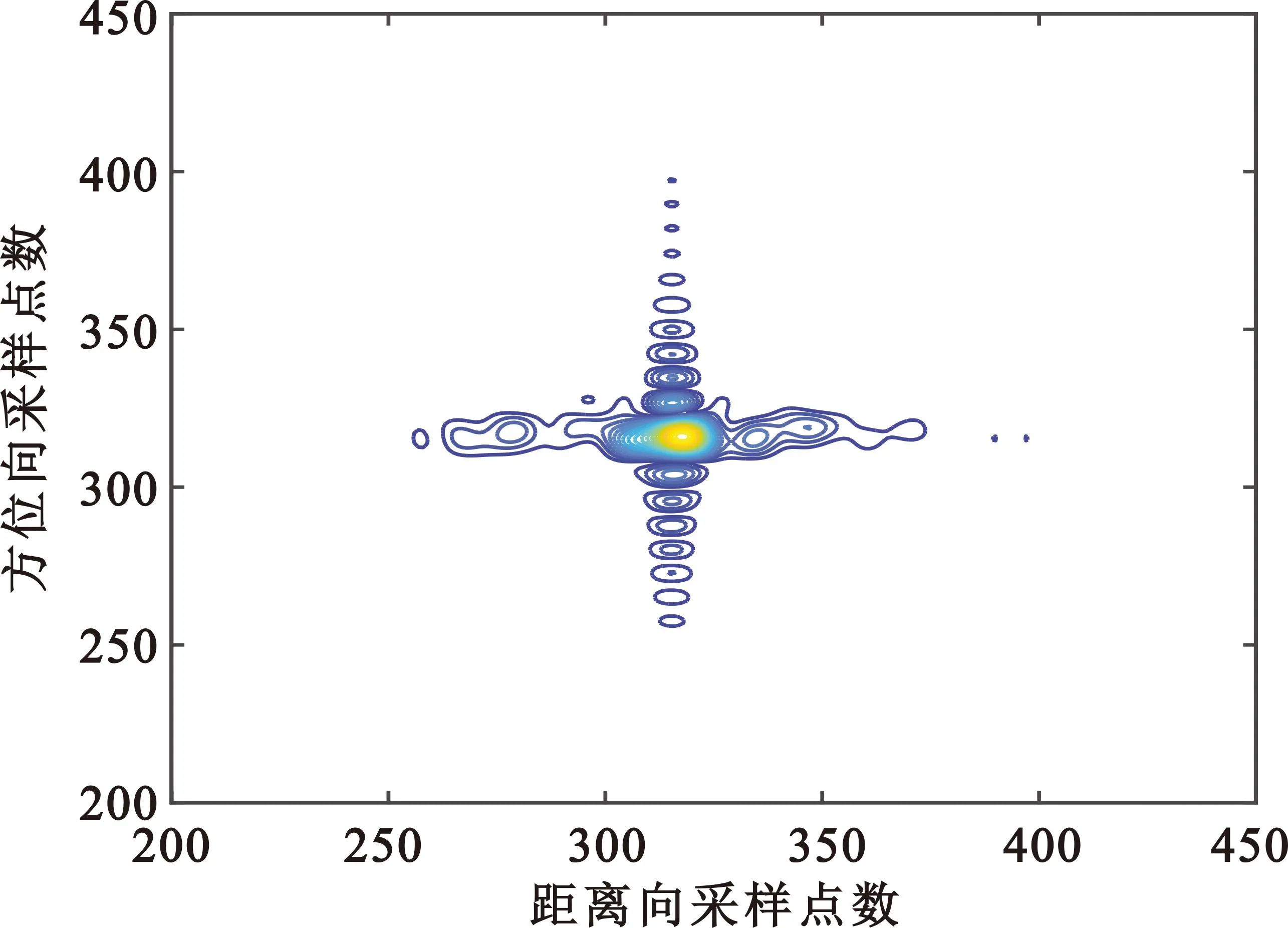
下面通过边缘点T5在使用算法前后的仿真结果进行分析。边缘点T5在未考虑方位向空变性之前,方位向聚焦效果较差,引入算法后方位向压缩虽然没有特别完美,但比之前有很大的改善,如图5所示。

(b)采用算法后图5 场景边缘点T5成像结果Fig.5 Imaging results of scene edge point T5
对相同的星弹双基系统构型,采用表1所示的参数,分别用文献[6]和文献[10]中所述算法对T5点进行成像,成像结果如图6所示。根据结果图对比可知,T5点方位向聚焦效果比未考虑方位空变性前有一定的改善,但是比本文所提算法成像效果差。因为文献[6]中没有对方位向多普勒调频进行补偿,而文献[10]中距离-方位耦合没有完全消除。通过三种方法对T5点方位向聚焦效果之间的对比,证明了本文所提算法的有效性。

(a)文献[10]中算法
(b)文献[6]中算法图6 T5点成像结果Fig.6 Imaging results of point T5
表2给出了使用算法前场景内目标点T1和T5的各项成像性能指标。
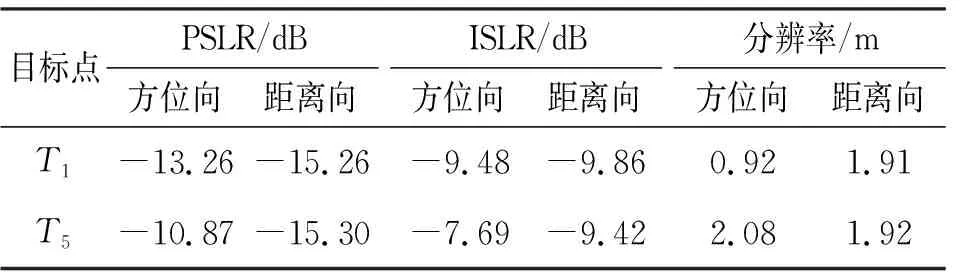
表2 算法使用前成像质量分析Tab.2 Image quality analysis without using the algorithm
表3给出了使用算法后场景内目标点T1和T5的各项成像性能指标。

表3 算法使用后成像质量分析Tab.3 Image quality analysis with using the algorithm
经对比可知,使用算法后边缘点T5方位向PSLR、 ISLR、分辨率分别提升了2.41 dB,1.29 dB,1.16 m。结合成像结果和各项指标,该方法对加速度所引起的方位空变性问题起到了一定的改善作用,方位向得以压缩聚焦,获得了良好的成像结果。
6 结束语
本文首先搭建了星弹俯冲双基构型,首先在距离频率方位时域上进行多普勒中心校正,接着利用级数反演法推导了信号二维频谱,然后完成了距离压缩和徙动校正。针对方位向多普勒调频率空变性问题,采用非线性变标的算法,使得方位向聚焦得到很大改善,成像质量有所提高,但对完美的点目标图像形成还有所差距,需要未来更深入研究。