世界中学生男子跳高冠军董子昂专项技术诊断
2024-01-24刘嘉伟苑廷刚黄健民周贤朋
刘嘉伟,苑廷刚,黄健民,周贤朋
(1.国家体育总局 体育科学研究所,北京 100061;2. 清华大学 体育部,北京 100084;3.江苏省体育局 田径运动管理中心,江苏 南京 210024;4.江苏省常州市体育运动学校,江苏 常州 213022 )
中国男子跳高纪录是朱建华于1984年创造的2.39 m,至今38年期间不断涌现出周忠革(2.33 m)、王宇(2.34 m)和张国伟(2.38 m)等优秀运动员,但近年来该项目国内整体水平和在世界大赛成绩不断下滑,目前有王振、武国彪和董子昂等“00后”新生力量崛起,有望成为该项目的中坚力量。2005年出生的江苏运动员董子昂,在2021第十四届全国中学生运动会上以2.24 m的成绩取得冠军,这一成绩达到了运动健将水平、打破原赛会纪录并位列年度排名第4;在2022第十九届世界中学生运动会上,董子昂以2.09 m的成绩突出重围折桂。年仅17岁的董子昂在身体机能、体能素质、专项技术和心理素质等方面有持续突破的较大空间和可塑性,有望成为中国男子跳高的一颗闪耀新星。
对董子昂运动技术进行个案研究,首先可找出其有待提升之处,对其不足点提出意见,提高训练的针对性;其次通过持续监测建立个体数据库,探索其技术特点和风格,提高训练的个性化;同时为其他运动员的技术分析和训练优化提供参考,助力该项目整体水平的提升。
1 研究对象与方法
1.1 研究对象
以董子昂2021—2022年12个跳次的运动技术作为研究对象,并将其与7名中国优秀运动员9个跳次(对照组)进行对比。
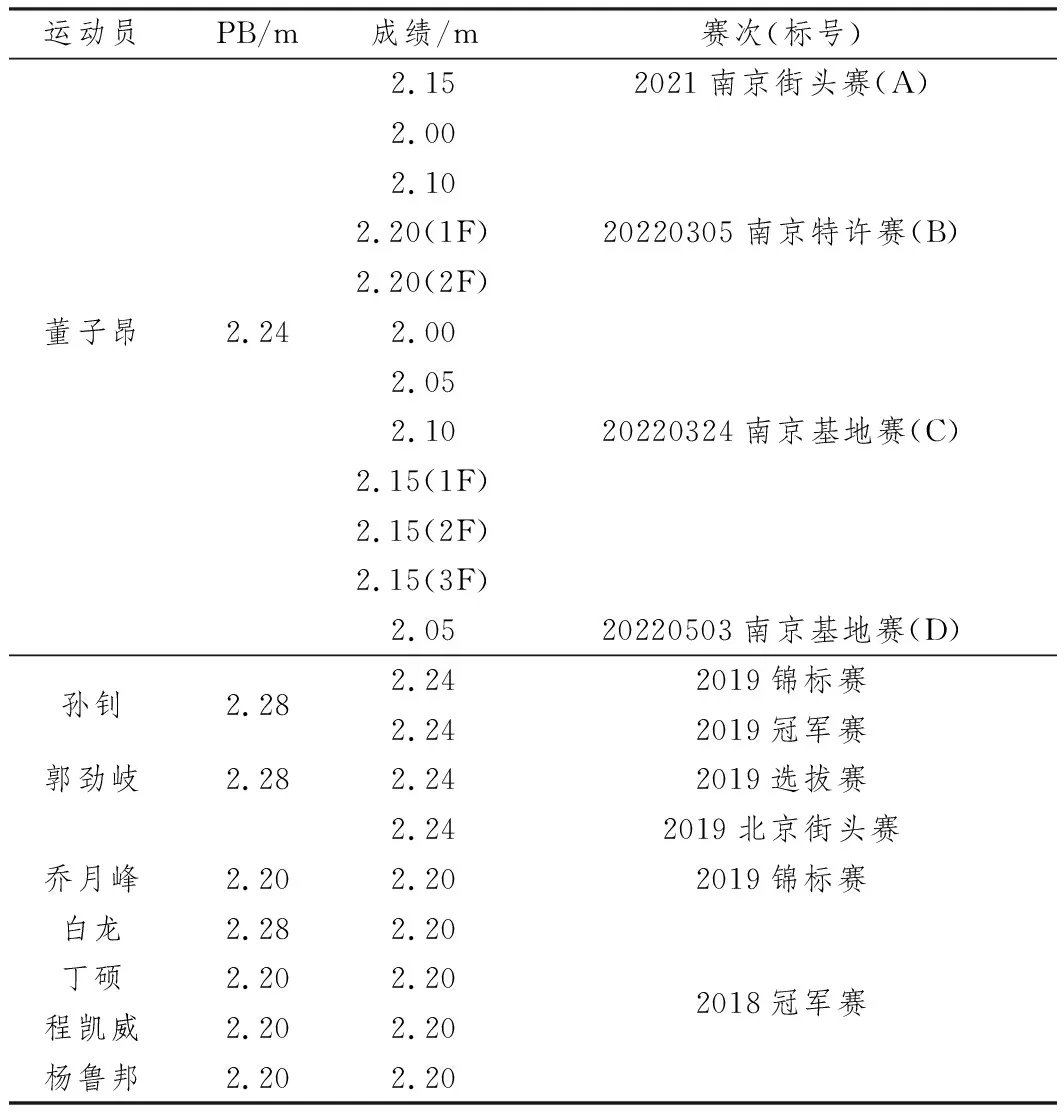
表1 董子昂跳次信息
1.2 研究方法
1.2.1 文献资料法
通过中国知网、Web of Science和世界田联官网等平台查阅跳高运动技术分析方面的相关文献。
1.2.2 访谈法
就数据采集方案、技术指标选取、参数分析和运动技术改进等方面问题制定访谈提纲进行专家咨询,访谈对象共计5人,分别为:苑廷刚(国家体育总局体科所,研究员)、黄健民(中国国家田径队,国家级教练员)、周贤朋(江苏省田径运动管理中心,王振助理教练)、王振(江苏省田径运动管理中心,第十四届全运会男子跳高冠军)、董子昂(江苏省田径运动管理中心,第十九届世界中学生男子跳高冠军)。
1.2.3 视频拍摄解析法
使用3台高1.20 m、帧速率50帧/s、质量1080 p的松下相机于跳高架0°、90°和130°位进行拍摄,使用SIMI三维标定框架进行现场标定。使用SIMI Motion 9.2.2对视频进行三维解析,利用DLT法进行三维坐标转化、利用截断频率7 Hz的Butterworth法进行数据平滑和利用Hanavan模型得出人体质心点[2]。
1.2.4 实地观察法
于2021年11月以国家男子跳高队科研人员身份随黄健民教练组进行训练辅助和科技助力工作,随队期间了解并记录董子昂的运动技术情况。
1.2.5 数理统计法
使用SPSS23对数据进行正态分析、差异性分析和描述性统计等分析,其中正态检验Kolmogorov-Sirnov和Shapiro-Wilk均得出P>0.05,则数据服从正态分布,满足正态分布的数据使用独立样本T检验进行差异分析、不满足的使用Mann-Whitney U检验,得出P<0.05时有显著性差异。
1.2.6 对比分析法
将董子昂与中国优秀运动员进行对比,探究其技术存在的不足和所具备的技术特点;将董子昂成功与失败跳次进行对比,探索试跳失败的原因,根据技术不足与失败原因提出建议。
2 研究结果
2.1 助跑阶段技术
根据前人研究,助跑最后2步是衔接助跑与起跳的关键技术环节,具有承上启下的重要影响[3],本研究对助跑最后2步技术进行着重研究。
2.1.1 助跑步长及步速
通过表2数据统计可以看出,董子昂在倒2步相对步长较对照组平均小1.15%,倒1步步长与对照组均呈缩短规律,但相对步长较对照组大1.59%,董子昂在助跑最后2步的步长变化上呈倒1步步长小幅缩短的特点。董子昂在最后2步的速度上均高出对照组(倒2步0.08 m/s、倒1步0.14 m/s),倒1步步速下降但幅度相比对照组小0.84%,董子昂在助跑最后2步的速度上呈步速快且倒1步速度下降幅度小的特点。

表2 助跑步长和步速数据
将成功与失败跳次进行对比发现,失败跳次中倒2步平均步长大6 cm、倒1步大7 cm并且步长变化比率降低0.39%;失败跳次倒2步平均速度快0.07 m/s、倒1步快0.09 m/s且变化比率小0.19%。数据虽不呈显著差异性,但存在失败跳次中步长步速增加且变化比率小的情况。
2.1.2 助跑质心高度
从表3数据统计可以看出,对照组2次质心高度变化均值为-1.77%±1.53%和-2.61%±2.36%,2次质心高度变化为不断下降且降低幅度增加的特点;董子昂则为2.55%±1.02%和1.04%±1.92%,2次质心高度呈不断升高但升高幅度减小的变化特点。经过差异性分析,倒2步质心高度董子昂较对照组平均低5 cm,且存在显著差异性(方差P=0.446、均置P=0.013)。
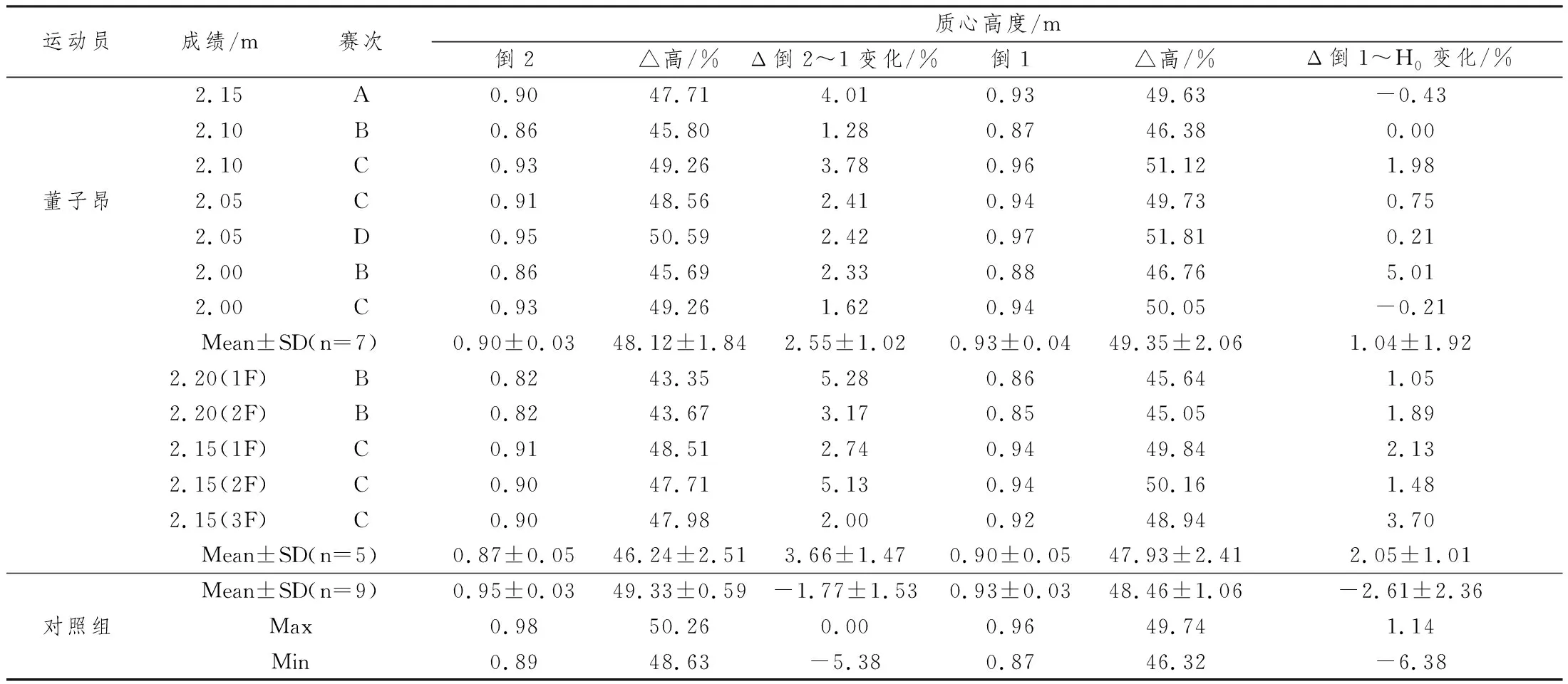
表3 助跑质心高度数据
对比成功跳次发现,失败跳次中到2步和倒1步质心高度均平均降低3 cm,但不存在显著性差异;倒2步~倒1步和倒1步~起跳着地的2次变化比率均值降低分别增加了1.11%和1.01%,并呈显著差异性(方差P=0.554、0.482、均置P=0.023、0.03),可认为最后2步质心高度的降低和2次质心高度变化比率的显著增加是导致董子昂试跳失败的因素之一。
2.1.3 助跑步时与关节角
通过对比成功跳次,发现在失败跳次中,董子昂倒1步步时较倒2步减少,且步时相对稳定;失败跳次中倒1步支腾比平均增加0.05,说明支撑时间占比有增加的趋势,最后2步步时变化比率上较成功跳次平均降低5.74%。在倒1步着地膝角上失败与成功跳次仅平均相差1.32°,但离地膝角上相差5.21°且呈显著差异性(方差P=0.795 >0.05、均置P=0.019<0.05),倒1步离地膝角的减小反映的是不充分蹬伸,可认为这是导致其试跳失败的因素之一。
2.2 起跳腾空阶段技术
起跳是将所获得的水平速度转化为垂直速度,在较大转化的同时获得旋转动力,以此来衔接腾空过杆动作技术,腾空过杆主要利用起跳离地后质心腾起高度和充分的“背弓”姿势使身体越过横杆,本文对起跳和过杆进行着重研究。
2.2.1 质心高度参数
从表5统计数据可以看出,董子昂H0和H1相对高度均值大于对照组(ΔH0大2.68%、ΔH1大1.69%),工作距离和H2上较对照组均值小0.03 m,并且在H0和H1的相对高度以及H0~H1变化比率上呈显著差异性(方差P=0.189、0.671、0.849、均置P=0.002、0.047、0.029),可认为董子昂较对照组在起跳着地至离地过程中的质心垂直工作距离和H2上存在差距。
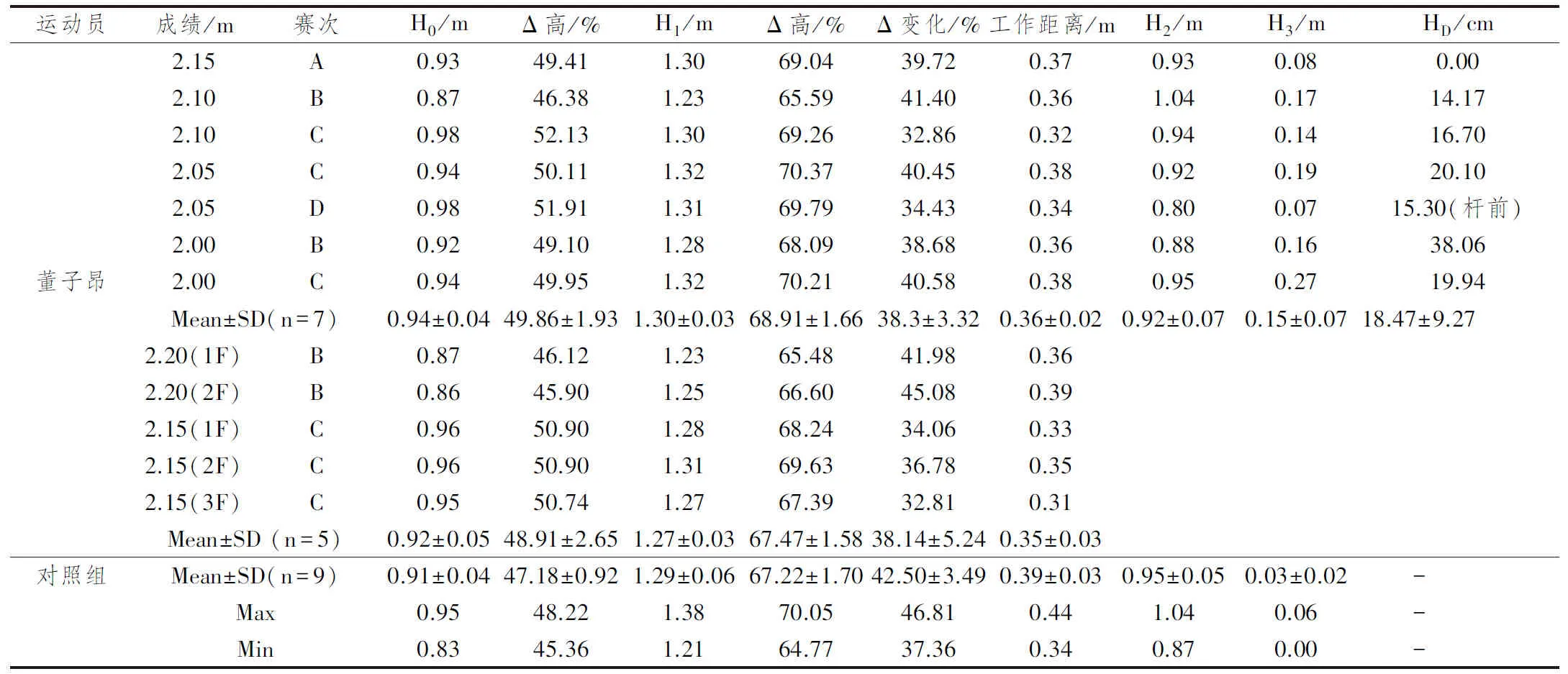
表5 起跳腾空质心高度数据
对比成功与失败跳次发现,董子昂失败跳次中H0、H1和工作距离较成功跳次均值更小(2 cm、3 cm和1 cm),虽不存在统计学差异,但考虑到质心垂直工作距离是董子昂起跳技术中的不足点和不稳定点,可认为H0、H1和工作距离是导致其试跳失败的因素之一。董子昂成功跳次H3均值达0.15±0.07 m,远超对照组0.03±0.02 m,董子昂质心最高点能够达到2.27 m,但在2.15 m和2.20 m高度出现多次失败,结合成功跳次HD均值18.47±9.27 cm,可看出董子昂虽能达到较高质心高度,但质心最高点与横杆在水平面上的间距较大,没有能够充分利用最高质心高度来过杆,过杆经济性与对照组差距明显、存在很大不足。
2.2.2 起跳相对位置及时间
对照组踏跳时间均值为0.15±0.01 s,相较董子昂平均慢0.02 s,并呈显著差异性(方差P=0.213、均置P=0.009),说明董子昂具有踏跳用时短的起跳技术。由表6统计数据发现,董子昂踏跳总时间基本稳定,在成功跳次中缓冲占比约50%,但在失败跳次中缓冲时间占比增加(约占60%)。在着地时刻质心至起跳脚距离上,董子昂失败跳次平均增加3 cm,但不存在显著差异性;起跳距离上失败跳次较成功跳次平均增大15 cm,并呈显著差异性(方差P=0.909、均置P=0.019),可认为起跳距离增大是导致其试跳失败的因素之一。

表6 董子昂成功与失败跳次数据
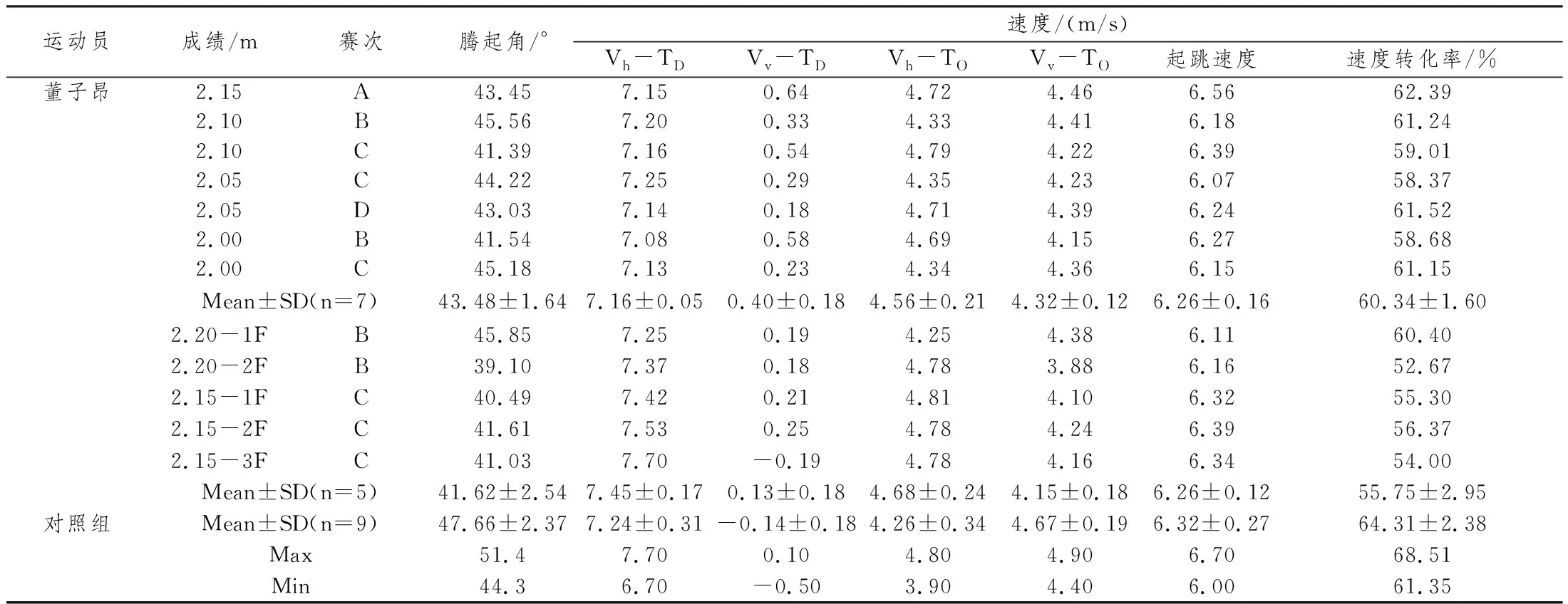
表7 起跳速度及腾起角数据
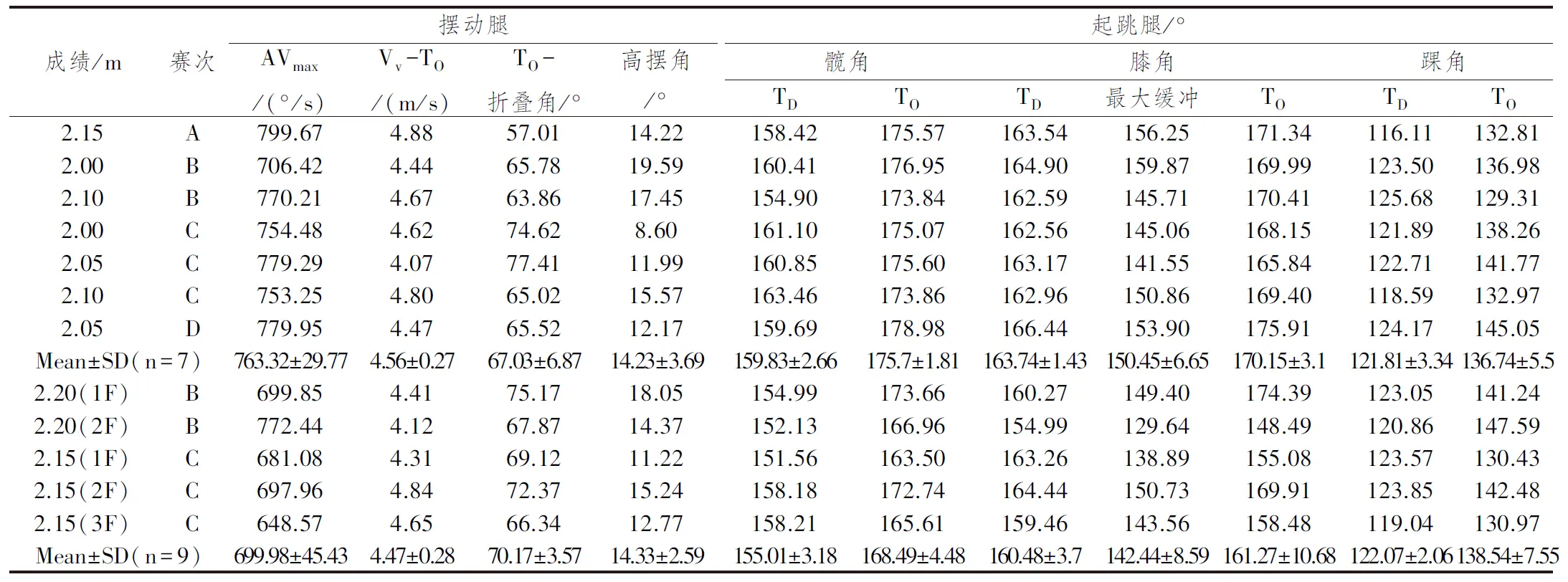
表8 董子昂成功与失败跳次数据
2.2.3 起跳速度及腾起角
对比对照组参数,董子昂腾起角平均小4.17°且呈显著差异性(方差P=0.327、均置P=0.001);起跳垂直速度平均慢0.35 m/s且呈显著差异性(方差P=0.053、均置P=0.001);起跳水平速度平均快0.31 m/s、速度转化率上小3.98%,且均呈显著差异性(方差P=0.052、0.516、均置P=0.046、0.002),可看出董子昂在踏跳过程中将着地水平速度向离地垂直速度转化的能力较差(起跳速度较对照组平均慢0.06 m/s)。在着地垂直速度方面,董子昂7个成功跳次均呈正值(0.40±0.18 m/s),表明垂直速度方向向上,而对照组均值为-0.14±0.18 m/s,相差0.54 m/s,数据呈显著差异性(方差P=0.169、均置P=0.000),可认为起跳着地时刻向上的垂直速度是董子昂自身技术特点。
对照分析成功与失败跳次数据,董子昂失败跳次中起跳着地水平速度有所增加(0.30 m/s),垂直速度减小(0.27 m/s),数据均呈显著差异性(方差P=0.053、0.504、均置P=0.001、0.030),董子昂在加大踏跳着地水平速度的同时弱化了垂直速度。失败跳次中踏跳离地时刻水平速度较成功跳次平均增加0.12 m/s、垂直速度减少0.17 m/s,速度转化率降低4.59%且呈显著差异性(方差P=0.339、均置P=0.006),董子昂失败跳次中速度转化效果更差,导致了水平速度无法有效转化为垂直速度同时影响腾起角(减小1.87°)。可认为董子昂踏跳着地时刻保持在0.40 m/s左右的垂直速度是其个性化的技术特点,弱化自身技术特点转而追求较大的踏跳着地水平速度和踏跳过程中速度转化效率低是导致其试跳失败的因素之一。
2.2.4 摆动腿与起跳腿参数
摆动腿技术上,董子昂成功跳次最大摆动角速度均值达763.32 °/s,远高于对照组474.30°/s±132.60 °/s,呈显著差异性(方差P=0.374、均置P=0.000)。失败跳次均值699.98 °/s,仍高出对照组225.68 °/s,对比成功跳次数据呈显著差异性(方差P=0.623、均置P=0.015),可认为董子昂摆动腿的快速摆动是其突出的技术特点,摆动腿摆速降低是导致其试跳失败的因素之一。除此之外较成功跳次,失败跳次摆动腿离地垂直速度平均减少0.09 m/s、离地折叠角增大3.14°和高摆角增加0.10°,结合摆动腿速度的降低可认为失败跳次中摆动腿存在摆动动作不充分的情况。
在起跳腿技术上,董子昂成功跳次在着地、最大缓冲和离地膝角上均大于对照组(159.22°±3.34°、138.69°±6.39°和164.86°±3.77°),且呈显著差异性(方差P=0.061、0.746、0.352、均置P=0.005、0.003、0.010),其中最大缓冲时刻差值最明显(11.79°),较大的支撑膝角有利于其降低身体质心、增加垂直工作距离,以此为起跳蹬伸做好准备,但较大的最大缓冲角度则反映了腿部支撑能力欠佳,不利于蹬伸动作的快速完成。董子昂蹬伸角度(19.69°)较缓冲角度(13.28°)增加了48.24%(6.41°),远高于对照组的27.41%(5.63°),董子昂充分的蹬伸幅度(较对照组大5.29°)反映其肌肉弹性和超等长收缩能力出色。
对照成功跳次发现,失败跳次膝角在着地、缓冲和离地时刻均有所降低(3.25°、8.01°和8.88°),并且蹬伸角度较缓冲角度仅提高4.36%(0.79°),较成功跳次平均下降43.89% (5.62°),数据呈显著差异性(方差P=0.098、0.625、0.374、均置P=0.047、0.037、0.021);此外髋角着地和离地角度较成功跳次平均减小4.82°和7.20°,数据呈显著差异性(方差P=0.485、0.091、均置P=0.017、0.002)。可认为髋、膝关节及周围肌肉刚度降低导致支撑角度的减小和缓冲不充分以及关节伸展和肌肉发力不足导致蹬伸不充分是造成试跳失败的因素之一。
3 分析与讨论
3.1 董子昂运动技术特点
董子昂在助跑最后2步中步长呈倒2步至倒1步小幅缩短(约-2.37%)的特点,步速呈速度快(约7.55 m/s)且倒1步速度保持能力强(下降约-2.27%)的特点, 较高的助跑速度有助于其利用腿部主动退让快速平衡外部载荷,达到起跳中良好的起跳腿着地缓冲效果,并使起跳腿蹬伸速度快、力量大和幅度充分[4]。同时董子昂具备快速起跳(约0.13 s)的特点。董子昂最后2步助跑至踏跳着地过程中有质心高度不断提高(倒2~倒1约2.55%、倒1~H0约1.04%)的特点,且H0和H1保持在较高位置(相对高度约49.86%和68.91%)。
除助跑速度快外,董子昂能具备起跳阶段高质心、快起跳的特点来源于以下几个方面:(1)起跳腿着地姿态积极充分(着地膝角约163.74°),腿部肌肉弹性和超等长收缩能力出色,能够做到大幅度蹬伸(约增加48.24%,6.41°)和离地时关节充分伸展(约170.15°);(2)摆动腿的快速摆动能力,董子昂平均达763.32°/s的摆动腿最大角速度能够减少起跳腿着地时刻制动力和促进起跳腿快速、充分的蹬伸,对起跳完整技术有重要影响[5];(3)起跳着地时刻已获取约0.40 m/s向上的垂直速度,这也是摆动腿摆动速度快减少起跳腿着地制动力的体现,着地时刻向上的垂直速度有助于起跳腿在缓冲时充分拉长肌肉,使腿部肌肉在牵张反射中储存更多弹性势能,结合主动用力发挥更大的做功功率。
3.2 董子昂技术不足之处
目前存在最为主要的三大不足之处在于:(1)起跳腿支撑能力差,在最大缓冲时膝角平均约150.45°,这是由于起跳腿无法承受地面所施加的反作用力从而增加膝关节缓冲的角度,这对后续快速、有力的完成蹬伸动作产生不利影响[6]。(2)起跳阶段速度转化率低(约60.34%),董子昂在起跳离地时刻水平速度过大(约4.56 m/s)但合速度(约6.26 m/s)和垂直速度(约4.32 m/s)慢,这将首先影响其腾起角度(约43.48°),较小的腾起角会使身体向前和向上的冲量受到影响[7];其次导致其起跳阶段身体质心垂直工作距离短(约0.36 m),使身体质心的移动效率降低。(3)腾空过杆经济性差,董子昂H3均值为0.15 m、HD为18.47 cm,表明其能够达到较高的身体质心最高点但未能准确出现在杆上,H4越大则身体质心通过横杆正上方的高度越低,H2的高度利用率越低,失败的可能性随之增加[8]。
3.3 董子昂失败跳次分析
试跳失败的原因来源于几个方面:(1)助跑速度过快超出自身可控范围,在失败跳次中助跑速度提升约0.08 m/s且变化比率降低0.19%。助跑速度过快会导致起跳腿蹬伸速度慢、幅度小和力度差现象[9],董子昂倒1步离地膝角不充分蹬伸(约小5.21°)导致起跳阶段摆动腿所受牵张反射作用减小而延缓最大摆动速度(约63.32°/s);助跑和起跳质心高度降低(约2.75 cm),过快的水平速度和较低的质心高度导致起跳着地时刻制动力增加(垂直速度减小约0.27 m/s)和踏跳缓冲时间占比增加(约占60%)。(2)助跑节奏和助跑点位发生改变,董子昂助跑最后2步步长平均增加6.5 cm,较大的步长应使运动员起跳点更加贴近横杆方面,但董子昂起跳距离却平均增加约15 cm,说明其最后助跑阶段的助跑节奏和点位已经发生了较大的改变,步长过大会使得起跳阶段身体质心处在过低位置,延长起跳时间和速度,不利于水平速度向垂直速度转化;同时着地时刻质心至起跳脚距离增加约3 cm,说明董子昂在助跑过程中身体姿态发生改变,起跳着地时刻质心位置的落后将会带来较大的制动力和增加起跳缓冲时间[10]。(3)起跳阶段速度转化能力的进一步下降(约4.59%),着地水平速度的增加(约0.30 m/s),离地垂直速度得减小(约0.17 m/s),影响跳高成绩主要因素中的起跳合速度和腾起角均受到起跳垂直速度的制约,董子昂失败跳次腾起角度减小约4.17°。(4)起跳腿和摆动腿动作不充分、不到位,董子昂失败跳次中摆动腿不仅最大摆动速度降低明显,其离地时刻折叠角和高摆角增加(约3.14°、0.10°),说明其折叠程度和摆动高度不充分,这不仅影响摆动腿离地垂直速度(减少约0.09 m/s),同时也对起跳腿的缓冲和蹬伸造成干扰,完整技术节奏和效果受到消极影响;其次起跳腿膝角和髋角在着地(约3.25°、4.82°)、最大缓冲(约8.01°)和离地时刻(约8.88°、7.20°)角度减小,膝关节蹬伸角度变化幅度小(约4.36%)、角度增加小(约0.79°),均表现出膝关节和髋关节不充分蹬伸的现象,这将会导致起跳前摆速度降低、力量减小,水平速度不能有效的转化为垂直速度。
4 结论与建议
4.1 结 论
(1)董子昂技术特点有:助跑最后2步步长稳定,步速快(约7.55 m/s)且保持速度能力强,助跑至起跳过程中质心不断升高;起跳过程中H0与H1相对高度较高(约49.86%和68.91%),起跳着地时刻已获得约0.40 m/s向上的垂直速度,起跳时间短(约0.13 s);起跳腿着地膝角较大,腿部肌肉弹性和超等长收缩能力出色;摆动腿快速摆动能力强,平均最大角速度约763.32 °/s。
(2)董子昂技术不足有:助跑速度、节奏和点位不稳定;起跳腿支撑能力差,主要体现于起跳最大缓冲时刻(膝角约150.45°);起跳阶段速度转化率低(约60.34%),垂直速度慢(约4.32 m/s)、腾起角小(约43.48°)和质心垂直工作距离短(约0.36 m);过杆经济性差,H2的高度利用率低,H3均值为0.15 m、HD为18.47 cm。
(3)董子昂失败跳次成因有:助跑速度过快超出自身可控范围(倒2步约7.71 m/s,倒1步约7.55 m/s);助跑节奏和助跑点位发生改变,步长增加约6.5 cm,起跳距离同步增加约15 cm;起跳阶段速度转化能力降低(约55.75%),水平速度增加约0.30 m/s而垂直减小约0.17 m/s和腾起角度减小约4.17°;摆动腿最大摆动速度降低(约63.32°/s),离地时刻折叠程度(增大约3.14°)和制动高度不充分(高摆角增加约0.10°);起跳腿膝关节蹬伸幅度小(约4.36%),离地时刻髋关节(约168.49°)和膝关节(约161.27°)未能充分伸展。
4.2 建 议
(1)青少年跳高运动员助跑阶段训练中,首先在提高助跑速度前应先评定运动员起跳阶段速度转化能力,速度转化能力差的基础上发展助跑速度将适得其反;其次在提高助跑速度的同时注重助跑节奏及点位,训练运动员在不同试跳高度下助跑速度和节奏的稳定发挥;同时关注髋关节在助跑过程中的相对位置,避免出现髋关节滞后的不利情况。
(2)青少年跳高运动员起跳阶段训练中,除训练运动员起跳腿支撑能力和蹬伸能力、摆动腿的快速摆动和高摆制动能力外,加强双腿蹬摆配合技术的一致性、连贯性和稳定性,以此提高速度转化能力;此外通过运动员身体最高点与横杆水平间距(HD)作为修正起跳距离的依据,减小HD值以提高过杆经济性和H2利用率。
