基于超声波检测与图像处理的导盲仪设计
2024-01-23曹晓红陈江萍
潘 虹,曹晓红,陈江萍,丁 颖
(陕西服装工程学院,陕西 西安 712046)
0 引 言
视力障碍人群,由于视觉缺失,无法准确获取环境信息,同时也很难处理环境中的不同状况,其日常生活极为不便。而导盲仪具备道路检测、障碍物检测功能,可以为视力障碍人群出行提供帮助。但是传统头戴式、眼睛式导盲仪的图像识别度较低,无法准确识别红绿灯、盲道、障碍物等,并且头戴式导盲仪体积较大,对用户日常生活影响较大。针对以上问题,本文基于超声波检测与图像处理技术,提出一种穿戴式导盲仪,除了能够识别道路障碍物,还能够准确识别盲道、红绿灯、交通标志,以此来协助用户安全出行。
1 系统总体设计方案
1.1 导盲仪功能需求
常规导盲仪以检测障碍物为主,实际使用过程中无法实现复杂交通环境检测,不能正确引导盲人安全出行。考虑到盲人出行时的实际情况,提出以下导盲仪功能需求:
(1)障碍物检测:识别道路障碍物并以语音播报方式向盲人提醒,避免盲人受到伤害;
(2)语音提醒:以语音播报方式向盲人反馈环境信息[1];
(3)交通标志识别:识别道路红绿灯、斑马线、盲道等标识,为盲人穿越马路、自主出行提供帮助;
除了以上三种基本功能外,导盲仪还需要在满足识别速度、设备功耗等要求的基础上,减少设备体积,以便于盲人出行随身携带。
1.2 导盲仪系统结构
为满足导盲仪体积小、功耗低、成本低等要求,基于嵌入式平台进行导盲仪设计,利用图像处理技术和超声波技术实现图像信息、障碍物信息的实时处理,并通过语音播报方式反馈给盲人[2]。
导盲仪系统主要由信息采集模块、中心处理单元和语音播报模块组成,其中:信息采集模块由摄像头和传感器组成,主要用于识别道路障碍物,采集交通标识、盲道、斑马线等图像信息;中心处理单元为核心处理器,主要控制信息采集模块运行,并对采集数据进行处理和分析,最后反馈信息处理结果;语音播报模块根据图像处理结果和行动指令,通过语音提醒盲人及时躲避障碍物。
1.3 导盲仪硬件系统
常见导盲仪佩戴方式多为头戴式、眼睛式,考虑到导盲仪的体积和重量,本文采用穿戴式佩戴方式,以减少导盲仪对用户日常生活的影响。穿戴式导盲仪主要固定于用户胸前位置,不仅便于识别红绿灯、道路等信息,而且对用户的生活影响较小[3]。导盲仪硬件设备如图1 所示,其主要由嵌入式处理单元、超声波模块、摄像头模块和耳机组成。
嵌入式处理单元采用Allwinner H5 芯片,该芯片接口丰富、性能优越,可以满足导盲仪系统开发与设计需求;超声波模块采用JSN-SR04T 一体式超声波传感装置,其由独立控制电路和超声波探头组成,性能稳定、体积小、测量精度高;摄像头模块主要用于采集道路、交通标志、红绿灯信息等,本文采用分辨率为640*480 的VC3U31 免驱摄像头,该设备易安装、分辨率高、功耗低,并且支持10/9/8位RGB图像格式,视频流性能高达15 fps VGA 和30 fps GIF[4]。
2 导盲仪功能设计
2.1 斑马线识别功能设计
斑马线由黑白色矩形长条纹共同组成,并且间隔相同、相互平行,图像特征明显。根据摄像机拍摄特性,斑马线条纹呈现梯形,并且黑白条纹宽度由远及近依次递增。由于道路实际环境相对复杂,除了车辆干扰外,还会存在行人干扰因素,提取斑马线图像时,无法直接提取出完整图像,因此无法准确判断道路实际情况。针对该问题,需要排除图像干扰,并根据斑马线图像特征提取完整的图像[5]。
2.1.1 图像裁剪
为减少位置较高的物体对斑马线识别的干扰,需要对斑马线图像进行裁剪,选用图像下半部分,裁剪后的图像像素高度为原始图像的2/3;对于红绿灯图像,选用上半部分,图像像素高度为原始图像的1/2。对图像进行裁剪后,可以减少高处建筑物对斑马线图像识别的干扰。
2.1.2 斑马线图像灰度化
斑马线为黑白线条,而灰度图像像素只包括黑色和白色灰度值,可以准确提取出斑马线条纹特征,因此本文采用灰度化方法处理图像[6-8]。灰度化处理方法主要是将彩色图像像素点R、G、B颜色分量映射至灰度值,本文采用加权平均法对图像进行处理,该方法可以按照一定规则对原三通道图像像素值进行加权处理,并映射至灰度值,其表达式如下:
采用加权平均法对图像进行处理后,不仅可以减少不相关颜色的干扰,而且也可以突出斑马线黑白条纹特征。经过处理后的斑马线图像如图2 所示。

图2 斑马线灰度化处理后的图像
2.1.3 图像滤波
为减少图像中斑点、缝隙等噪声,采用中值滤波法对图像进行处理,以提高图像平滑度,减少图像失真情况。中值滤波法主要通过模板遍历斑马线图像,并按照一定规则对图像灰度值进行排序,最后采用中值代替图像像素灰度,以此来使领域内像素灰度更加接近实际情况[9]。
图像滤波处理过程中,设置数字信号序列为x(0,M),并设定一段长度为奇数的采样模板,用其模板中的中值代替原模板输出值x'(k),计算公式如下:
总体来看,中值滤波方法可以有效去除脉冲噪声,进一步改善图像失真情况。
2.2 人行道红绿灯识别功能设计
人行道红绿灯图像分别为站立人行图案和行走人行图案,为准确识别红绿灯人行图像,结合机器学习算法和背景去除算法识别图像,识别流程如图3 所示。
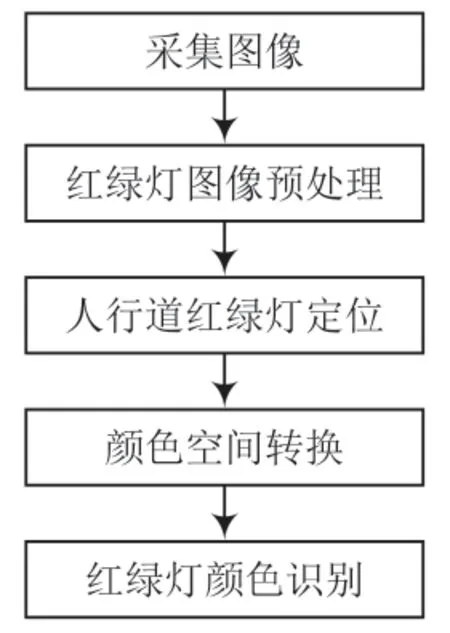
图3 红绿灯识别流程
导盲仪识别红绿灯时由于存在行人和建筑物等干扰因素,识别定位准确度较低。针对该问题,采用背景去除方法,提高红绿灯的定位准确度。因此在红绿灯识别算法中加入背景去除算法,首先在导盲仪中输入识别图像,根据红绿灯亮度较大的特征,通过形态学顶帽变化识别复杂环境中的高亮区域。
顶帽运算为形态学运算,其能够减少因光照强度不均引起的图像分割错误问题。为提高红绿灯识别定位精准度,在图像顶帽变换前将图像转化为灰度图,转化公式如下所示:
式中:Y为图像灰度信号;V、U为图像色差信号;B、G、R为三基色数值。
进行红绿灯图像灰度化处理后,采用顶帽变换对图像进行开运算,表达式为tophat=src-open(src, element)。
开运算的目的是去除昏暗图像中亮度较高的区域,然后与原始图像比较得到原始图像中红绿灯高亮区域。
由于道路上存在车尾灯、红绿灯等影响因素,进行顶帽变换后,图像中所有亮斑区域都会被提取。针对该问题,采用二值化算法对亮斑区域进行分析,去除亮斑较小的区域,并将剩余亮斑较大的区域进行放大处理,最后得到仅包含红绿灯的待检测区域[10]。
2.3 盲道识别功能设计
常见盲道颜色分为高亮橙色和与道路相近颜色,其纹理基本相近。根据该特征,基于LBP 纹理特征分类算法对盲道边缘特征和纹理特征进行分割和识别。识别流程如图4 所示。
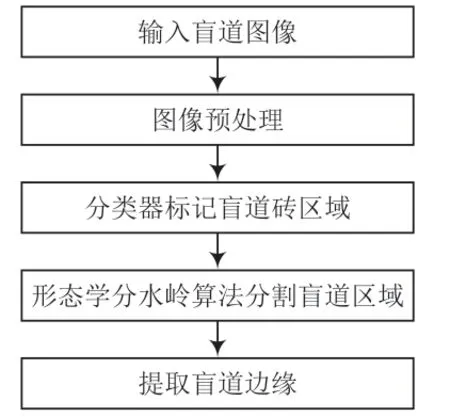
图4 盲道识别流程
识别盲道时,由于盲道拍摄影像存在失真情况,平行的盲道会出现不平行的问题,并且盲道砖块表现为规则排列的梯形。为准确识别盲道,采用透视变化对图像进行处理,该算法是一种利用透视旋转定律改变图像形状和大小的操作,其原理是采用三点共线原则,将图像投影至新平面,在不改变原有图像几何形状的情况下对图像进行投影,获取新的投影图像。透视变换前后的盲道如图5 所示,从图中可以看出,盲道内部问题和直线边缘等特征得到了真实还原;并且与变换前的图像相比,盲道特征更加突出和完整,进而提高了盲道分割和识别的准确性。

图5 盲道透视变换前后图像
2.4 超声波测距辅助系统
为降低行人、车辆等不可控因素引发的导盲仪漏判、误判等问题,采用超声波技术监测障碍物距离。超声波识别流程如图6 所示。

图6 超声波识别流程
在导盲仪的实际使用过程中,导盲仪主控制器向超声波传感器发送脉冲信号,然后由传感器向前方发出周期电平,最后检测回波信号计算障碍物距离。当道路前方位置存在障碍物时,超声波传感器接收到回波信号,并向主控制器输出回响信号,由主控制器计算障碍物距离。
为提高导盲仪障碍物识别准确性,当用户在盲道上行走时,如果检测到前方有障碍物,此时导盲仪提醒用户躲避障碍物,并向用户发出语音提醒。在此过程中导盲仪只反馈躲避障碍物信息,不反馈红绿灯、斑马线检测结果;待障碍物消失后继续对当前道路进行监测。
当用户行走在盲道上时,如果导盲仪检测前方有行驶车辆,即使前方红绿灯为绿灯状态并且斑马线被准确识别的情况下,导盲仪也会向盲人发出等待提醒。待道路无行驶车辆且可以通行的情况下,停止向用户发出避障提醒,以此来协助用户安全穿越马路。
3 结 语
本文根据导盲仪使用需求,对其使用功能进行设计,包括盲道、红绿灯、障碍物识别等功能;结合用户使用习惯,将导盲仪设计为穿戴式,减少导盲仪对用户生活的影响。基于使用需求和功能需求分析,采用分类器算法识别定位斑马线、红绿灯、盲道等,并通过区域分割和颜色识别等方法对图像进行处理,以准确识别道路;最后设计了超声波辅助系统识别道路障碍物,并通过语音播报的方式向用户发出提醒,以帮助用户及时躲避障碍和安全穿越马路。
