基于体域网的可穿戴式短跑运动状态监测
2024-01-23黎玉安张朝晖赵小燕夏怀亮
黎玉安,张朝晖,赵小燕,夏怀亮
(1.北京科技大学 自动化学院,北京 100083;2.北京市工业波谱成像工程技术研究中心,北京 100084)
0 引 言
短跑技术的演化经历了漫长的过程。公元前776 年在希腊举行的第一届古代奥林匹克运动会上,就已经设置了短跑比赛项目。那时的起跑采用站立姿势,利用脚后巨石的反力来增加起跑加速度,直到1887 年才开始采用蹲踞式起跑[1]。从脚跟先着地变成前脚掌着地,大大提高了短跑成绩[2]。1912 年的男子百米世界纪录为10 秒06[3],而目前纪录是创造于2009 年的9 秒58,其中短跑技术的进步功不可没。
短跑技术由起跑、加速跑、途中跑及冲刺跑等四个阶段的技术组成。通过对每个阶段运动状态的监测,深入了解对技术要领的执行情况,有利于为运动员制定科学的训练方案。
人体运动姿态监测可以利用可穿戴式传感器、外置传感器(光学式、图像式、声学式)、外置/可穿戴式混合传感器等三种途径实现。近些年来,随着微机电系统(Micro Electro Mechanical Systems, MEMS)制造技术的迅猛发展,基于MEMS 的传感器具备了体积小、能耗低、数据无线高速传输的优点[4],成为可穿戴设备的优选器件。
本文采用可穿戴式传感器,并以运动员个体为单元构成无线传感网络,实时采集运动员的姿态、速度、加速度信号,以进行再现和分析。
1 四元数姿态估计
四元数是一个四维复数,常用于表达三维旋转运动,其形式为[5-6]:
式中:q0、q1、q2、q3为实数;是互相正交虚单位向量。
微控制器将每个传感器的输出转换成四元数计算并无线发送给上位机。相比于角度信息直接发送,四元数具有处理速度快、占用存储空间少的优势,传输效率高,能耗也更低。
上位机将接收到的四元数进行融合解算,得出偏航角ψ、俯仰角θ、横滚角ϕ空间方向信息。当刚体的姿态发生变化时,刚体坐标系分别绕地理坐标系各轴旋转,得到偏航角ψ、俯仰角θ、横滚角ϕ的转换矩阵为:
式中:b代表刚体坐标系;n代表地理坐标系。转换矩阵的四元数表达式为:
从式(2)、式(3)可得出刚体坐标系旋转角度与四元数之间的关系为:
2 卡尔曼滤波算法
本文采用的MPU-6050 传感器芯片测量存在惯性传感器本身误差和外部环境影响[7]。卡尔曼滤波利用状态方程根据时间上的各测量结果进行最优估计,去除噪声和干扰的影响。常用的卡尔曼滤波方式对惯性传感器原测的数据进行建模、预测更新,对下一时刻的数据进行预测。
不同测量系统下模型有所不同,用X表示传感器原测的各项数据,基本动态系统模型如下[8-9]。
状态方程:
测量方程:
式中:Xk为k时刻系统的状态量;Φk,k-1为系统从k-1 到k时刻的状态转换矩阵;Γk-1为k-1 时刻系统噪声矩阵;Wk-1为k-1 时刻过程噪声;Zk为k时刻的测量值;Hk为k时刻的观测模型矩阵;Vk为k时刻测量的系统噪声。
状态更新:
式中,Kk为卡尔曼滤波增益。协方差矩阵公式为:
式中,A为作用在Xk-1上的状态变换矩阵。过程噪声的协方差矩阵为:
卡尔曼滤波增益为:
测量噪声的协方差矩阵为:
更新协方差:
式中,I为单位矩阵。
卡尔曼滤波通过线性状态方程和递归运算方法解决离散数据滤波问题,再结合输入输出得到的观测数据估算最优数据。
3 体域网系统设计
以往研究表明,短跑运动中各肢体的总体加速度范围在-3g到3g之间[10]。本文采用三轴陀螺仪和三轴加速度计的MPU-6050 传感器模块,具有可控的传感器测量范围,陀螺仪可测范围分别为±250°/s、±500°/s、±1 000°/s、±2 000 °/s,加速度计可测范围分别为±2g、±4g、±8g、±16g。传感器芯片尺寸为(4×4×0.9)mm,传感器模块将传感器芯片连接至8 根外接引脚,用于供电、控制、数据读取功能,如图1 所示。

图1 MPU-6050 传感器模块
本方案需要进行各肢体实时监测,采样频率高、无线网点反应速度快且传感器数量多。综合考虑,大带宽、低延迟的WiFi传输方式成为优先选择。各网点均有一定的运算能力,本文采用WiFi 技术的ESP8266 无线微控制器。所构成的可穿戴数据采集模块包括传感器模块、WiFi 模块、电池等三部分,如图2 所示。
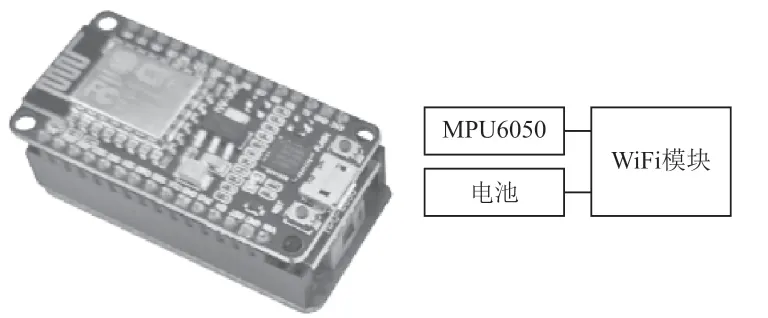
图2 可穿戴数据采集模块结构示意图
将10 个可穿戴数据采集模块组成体域网结构,如图3所示。
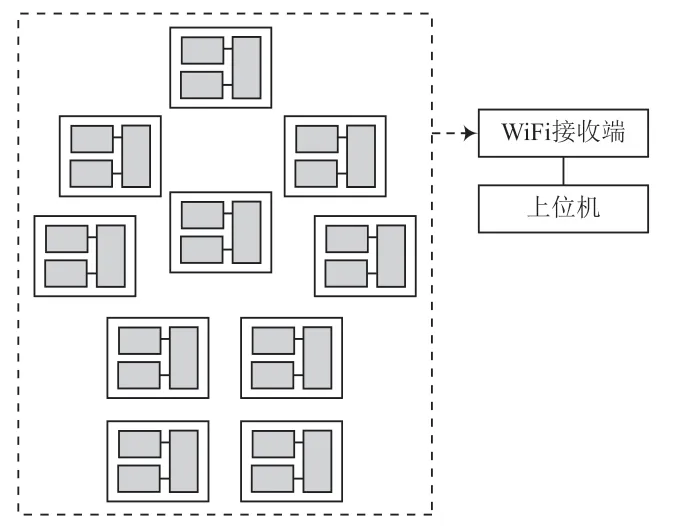
图3 体域网的构成
总体设计的体域网由10 个无线数据采集模块组成,根据不同的实验模式,采用的数据采集模块数量会有所改变且安装的方式不同。
运动状态数据处理流程如图4 所示。微控制器将传感器采集到的原始数据转换成四元数,通过WiFi 信号传输给接收端再通过串口上传给上位机,上位机将得到的四元数数据在软件上建模、记录跑步过程的信息。

图4 运动状态数据处理流程
4 实验结果分析
实验包括两方面主要内容:一是验证起跑、加速跑、途中跑、冲刺跑四个阶段的姿态监测效果;二是全程速度与加速跑监测效果。
4.1 姿态监测实验
采用10 个数据采集模块,采样频率为10 Hz,监测运动员跑步的姿态变化过程、接收端模块及上位机。实验者在头部、背部、两边胳膊肘、手腕、大腿、脚踝分别穿戴各数据采集模块,如图5 所示。

图5 姿态监测实验数据采集模块布置方案
根据运动员各肢体产生的空间旋转角度,传感器将采集到的数据转换成四元数无线传达至上位机,上位机将得到的四元数数据在软件上建模、记录跑步过程四个阶段各肢体的姿态信息。运动员跑步姿态数据自动监测实验结果如图6所示。
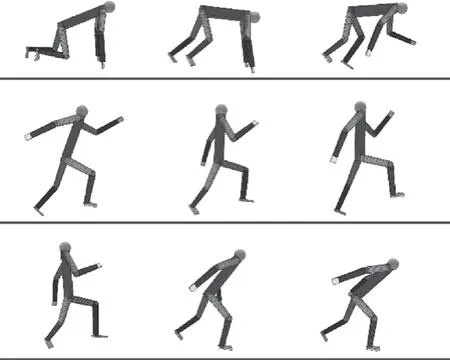
图6 短跑运动员姿态监测建模
4.2 速度与加速度监测实验
实验者穿戴一个脚踝数据采集模块,跑道上安装两个间接收发数据模块、接收端及上位机。实验验证本文设计中采用的ESP8266 WiFi 模块在无遮挡情况下传输距离在45 m 以内,且距离超过30 m时出现严重的延迟、数据丢失问题。因此,全程跑100 m 将不能直接把数据从穿戴数据采集模块无线传达至上位机。本文设计的方案添加中程收发数据模块,增加了传输距离,保证监测运动员的全程跑步速度、加速度信息。跑道的接收信号模块布置方案如图7 所示。

图7 跑道接收信号模块布置
户外实验在100 m 实际跑道上进行,采样间隔为10 ms,对运动员穿戴数据采集模块的加速度信息进行卡尔曼滤波处理,得到速度与加速度变化曲线如图8 所示。对脚踝速度作光滑曲线,得出运动员全程跑的速度变化曲线如图9 所示。在100 m 跑步过程中,运动员通过调节步频控制跑步速度,跑前30 m 时添加了减速阶段,过30 m 后再加速跑。

图8 运动员全程跑数据

图9 运动员全程跑速度分布
5 结 语
针对短跑运动训练监测的需求,本文提出了一种低功耗、微型化、无线传输的实施方案。通过实验测试,基于六轴惯性传感器、微控制器和无线传输技术,设计了组成体域网的10 个可穿戴无线数据采集模块,监测运动员各肢体的空间信息,采样间隔可从10 ms 调节至100 ms。通过两种主要实验监测运动员全跑程的运动状态,为科学训练提供了一个辅助手段。
