便携式智能仰卧起坐计数器的设计
2024-01-23华志远王奕智李全彬
华志远,王奕智,李全彬
(1.江苏师范大学 物理与电子工程学院,江苏 徐州 221100;2.江苏师范大学 江苏圣理工学院-中俄学院,江苏 徐州 221100)
0 引 言
仰卧起坐是大学体育的必测科目之一,市场主流的仰卧起坐测试仪普遍笨重,漏检问题严重,对受测群体也不友好[1],且成本较高,单个售价在1 600 元至6 400 元不等。随着微电子计数的发展,MEMS 陀螺仪凭借其体积小、价格便宜、测量范围大等优势在姿态测量方面逐渐被广泛使用。
MEMS 陀螺仪采集的数据需要利用信息处理算法进行姿态确定。角速率积分法和组合系统姿态确定法是最常应用的两种姿态确定方法[2]。其中角速度积分法难以避免累计误差与适应范围有限的问题,而组合系统姿态确定法可以融合加速度计、陀螺仪等,使得测量结果更加精确。考虑到MEMS传感器易受干扰,由IMU 直接采集到的数据转换成的姿态角存在较大误差。为了解决这一问题,张泽权[3]提出了一种改进双层卡尔曼滤波融合算法,可以有效地对噪声起到滤波作用,对磁力计、加速度计与陀螺仪具有良好的数据融合性能。
MPU6050 作为一款6 轴(加速度计与陀螺仪)运动处理组件,解决了加速度计与陀螺仪组合时伴随的时间轴之差的问题[4]。在水下平台姿态测量[4]、智能平衡小车的姿态信息获取[5]方面取得了不错的效果。有学者提出,MPU6050配合单片机可以用于人体运动姿态测量,并成功识别人体的哑铃动作[6]与跌倒姿态检测[7]。
在智能化仰卧起坐计数方面,已有研究人员提出了一些解决方案。文献[8]利用传感器测量人体运动姿态角度,针对肘关节角度测量提出一种二级扩展卡尔曼滤波算法,优点是可以避免欧拉角的万向节锁问题,有效避免磁场干扰,但是由于算法较为复杂,难以通过STM32 系列单片机实现实时解算倾角。文献[9]针对深度学习技术在仰卧起坐测试领域的实时性较差问题,提出了一种改进目标检测网络的仰卧起坐测试计数算法。该算法的实现需要借助高性能设备,成本较高。文献[10]则利用MPU9250 搭配单片机获取人体在仰卧起坐运动时的倾角变化,具有很高的参考价值。
本文设计了一款便携、成本低廉的智能仰卧起坐计数器。计数器使用MPU6050 内部的数字运动处理单元(DMP)对传感器数据进行滤波和信息融合,可直接读取四元数[11]。这使得主控芯片摆脱繁琐的数据滤波与融合,对动作捕获的灵敏度大大提升。设备外观设计成环状结构,方便安装在测试者的手臂上;利用姿态解算出的翻滚角作为参考角,使用霍尔传感器和光敏传感器辅助判断,实现准确的仰卧起坐计数;设备具有通信接口,可以将数据上传至上位机设备,实现多台设备的同时计数。
1 系统硬件设计
本设备采用在手臂处安装监测手环的方式实现对测试人员的仰卧起坐计数。监测手环主板(如图1 所示)主控芯片使用STM32F103C8T6,利用MPU6050 姿态传感器配合霍尔传感器与光敏电阻实现姿态判断。手环上配备OLED 屏幕,用于数据显示,通过NRF24L01 芯片实现与外部智能设备的数据通信。

图1 系统主板设计
监测手环(外观如图2 所示)由测试人员佩戴,其中使用MEMS 模块解算测试人员的运动倾角,使用光敏传感器与霍尔传感器判断测试人员的关键动作是否符合运动标准,用于捕捉测试人员的动作数据,按照标准判断动作是否合规。监测手环将仰卧起坐的数据实时显示在OLED 屏幕上面。系统电路设计如图3 所示。
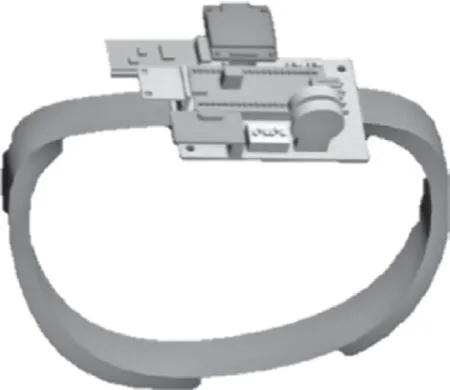
图2 系统外观

图3 系统电路设计
2 仰卧起坐动作捕捉功能设计
仰卧起坐计数包含三个关键的环节:(1)双臂弯曲度判断;(2)身体倾斜角度判断;(3)触碰到膝关节的判断。因此,设计中包括用于测量人体倾角的姿态角度传感器、用来检测仰卧起坐过程中内肘关节是否夹紧的光敏电阻以及用来判断上半身向膝盖处靠拢时动作是否到位的霍尔传感器。通过这三个传感器实现对仰卧起坐姿态数据的采集。
2.1 身体倾角解算
本文使用的运动姿态检测传感器为InvenSense 公司的MPU6050。该芯片内部自带的数字运动处理器,通过加载官方固件,可以读取经由芯片解算后的四元数。为了能够更加方便地描述人体在仰卧起坐运动过程中上臂的姿态变化,本文将读取到的四元数经过变换后得到欧拉角。翻滚角α、俯仰角β、偏航角γ的转换公式如下[12]:
为了检测解算姿态算法的可靠性,在静置状态下测试了MPU6050 的零点偏移情况,结果如图4 ~图6 所示。

图5 翻滚角静置实验

图6 俯仰角静置实验
偏航角的零点在长时间静置下偏移严重,而翻滚角和俯仰角在长时间的静置下零点附近仅有微小扰动。本文使用翻滚角作为姿态检测的参考角度。
为了测量仰卧起坐时的人体姿态变化,需要建立以臀关节为中心点的连杆模型。MPU6050 初始化角度时,以测试者的身体正前方为Z轴,左臂方向为X轴,头指Y轴,建立三维坐标系[13]。
文献[14]与文献[15]指出欧拉角存在“奇点”问题。在实际测试时发现,当MPU6050的X轴指向地面或者正上方时,俯仰角会发生不规律的极大扰动,严重影响数据采集的准确度。本设备将监测手环安装在左上臂内侧,可以确保X轴不会指向地面,有效解决了俯仰角扰动问题。
2.2 身体姿态检测
霍尔传感器可以通过输出的电压值表示磁场的大小,在相同的条件下,其距离磁铁越近输出的电压越大,距离磁铁越远输出的电压越小。通过输出电压的大小可以判断传感器与磁铁的距离。如图7 所示,在测试者的膝盖处放置磁铁,在手肘处安置霍尔传感器。在仰卧起坐的标准姿势中,要求两肘触及或超过双膝。本设备可以根据磁场强度是否达到霍尔传感器的触发阈值判断本次仰卧起坐的动作是否符合标准。

图7 设备佩戴示意图
仰卧起坐运动标准中还要求测试者将肘部关节合紧。在肘部关节内侧放置光敏电阻,如图8所示,当肘部关节合紧后,肘部内侧的光敏电阻因为光线强度不同,其阻值会发生变化。由此判断测试者的关节是否夹紧。
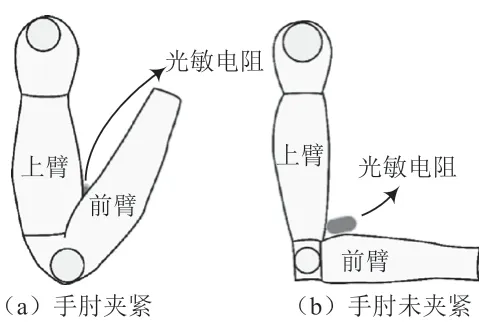
图8 光敏电阻放置图
3 系统软件设计
本系统初始化时,需要将仪器放平,自动配置MPU6050的参数,建立空间直角坐标系。用户需要在上臂佩戴该设备,在膝盖处佩戴含有磁铁的绑带。当设备的按键被按下后,设备自动开始计数工作。在用户平躺时,程序记录下用户平躺时的姿态数据,作为倾角的起始角度;当用户起身后,主控芯片实时解算姿态传感器的倾角数据;当检测到倾角达到最大值后,设该值为结束角度。仰卧起坐成功计数的第一条件为结束角度与起始的差值大于设定阈值。在用户做仰卧起坐时,在内肘处的光敏电阻会实时检测用户的内肘是否夹紧,并将手臂是否夹紧作为仰卧起坐计数标准的第二条件。在用户起身时,霍尔传感器会检测设备与膝盖处磁铁的距离,并将手肘是否触碰膝盖周围作为仰卧起坐计数标准的第三条件。在规定的时间内,设备自动计数后,将不合格的计数数据剔除,最终计数结果通过OLED 显示。监测手环工作逻辑如图9 所示。本设备预留有NRF24L01 通信模块,最终的数据可通过该通信模块无线传输至上位机设备。
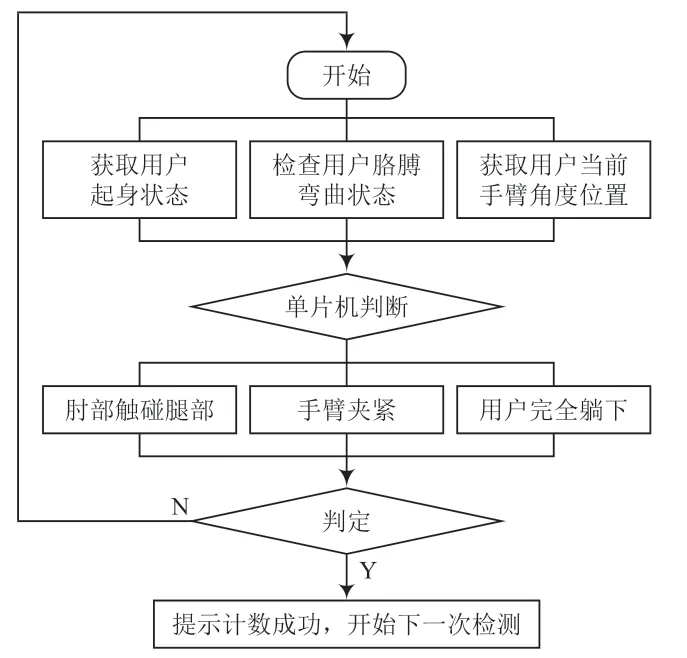
图9 监测手环工作逻辑
4 实验结果
将设备在地面水平放置,等待MPU6050 模块初始化完成后,将设备安装至测试者上臂并开始测试,如图10 和图11 所示。记录测试者的翻滚角变化如图12 所示。

图10 测试者佩戴设备

图11 仰卧起坐测试动作

图12 翻滚角变化
为了测试设备对不同的测试人员的适应性,实验选取三名测试者,测试结果见表1 所列。实验结果表明,利用MPU6050 传感器可以较好地捕捉测试者的动作变化;当测试者出现不符合标准的动作时,光敏电阻和霍尔传感器可以敏锐地捕捉到,并剔除不标准的计数个数,实现了准确的仰卧起坐计数。
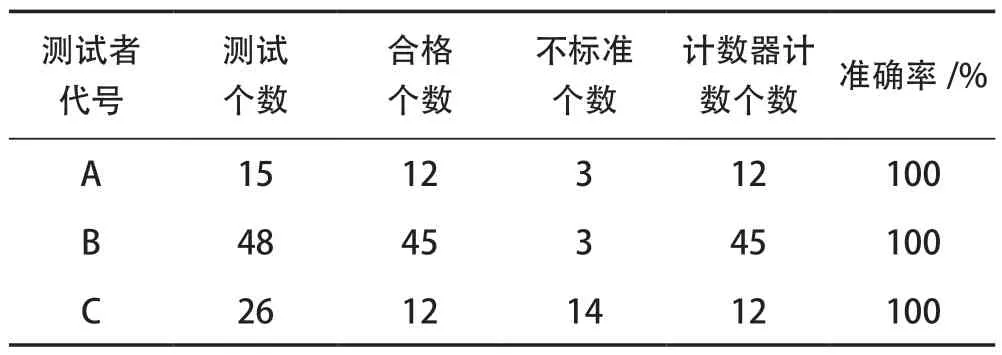
表1 不同测试者测试结果及准确率
5 结 语
本文设计了一种智能化的便携式仰卧起坐计数器,利用嵌入式芯片与智能姿态传感器,实现准确的仰卧起坐计数,可以完美替代传统的人工计数方式。设备留有外设通信接口,未来可以通过无线通信的方式,实现仰卧起坐数据的智能化组网及数据处理。
