混沌系统的有限时间间歇模糊同步控制
2024-01-23闫丽宏胡鹏超陈西西
闫丽宏,陈 楠,石 磊,胡鹏超,陈西西,张 娜
(1.咸阳师范学院 数学与统计学院,陕西 咸阳 712000;2.延安大学 数学与计算机科学学院,陕西 延安 716000)
0 引 言
众所周知,混沌是一个存在于自然界和工程领域的典型非线性动力系统。一般地,当研究非线性动力系统时,遵循由确定系统到随机系统再到不确定系统的研究思路。对于确定和随机混沌系统,许多学者从不同角度进行了深入研究,并取得了相应成果,如混沌模型构造[1-2]、混沌性质刻画与分析[3-4]、混沌控制与同步[5-7]。但是,对于不确定混沌系统同步控制的研究仍较少。
T-S 模糊理论是解决不确定复杂系统甚至是病态非线性动态系统[8-10]建模和控制方面问题的非常有效的方法。通过T-S 模糊理论,可以将非线性混沌系统转化为含有非线性系数的线性系统,进而实现系统的性能分析与控制[11-13]。同时可以将模糊控制理论应用到混沌系统的同步控制中,主要包括基于模糊的控制[14-16]、自适应模糊同步控制[17-19]、脉冲模糊控制[20]、模糊滑模控制[21]、模糊间歇同步控制等[22]。间歇控制方法基于受控系统状态,将控制作用间歇地作用到受控系统中,可以节约控制成本,提高控制效率,目前在复杂动态网络等非线性系统的同步控制中得到应用。
基于以上考虑,本文针对一类低维的非自治混沌系统,通过理论分析和数值模拟,阐述基于T-S 模糊理论与自适应反馈控制策略实现耦合混沌系统同步的基本思想。
1 问题描述
考虑如下混沌驱动系统:
式中:x=(x1,x2,...,xn)T∈Rn表示驱动系统的状态;A∈Rn×n是线性参数矩阵;f(x(t))是混沌系统的非线性部分。
相应的响应系统为:
式中:y=(y1,y2,...,yn)T∈Rn表示混沌响应系统的状态向量;u(t)是待设计的外部控制器。
这里采用如下的模糊规则:
规则l:θi(t)是第i个节点的先验变量,i=1, 2,...,m;Flm是具有隶属函数特征的模糊集。如果θ1是Fl1,θ2是Fl2,...,θm是Flm,那么:
式中:r是IF-THEN 规则的数量;Al∈R3×3是模糊矩阵。采用标准的模糊推理方法,通过单点模糊推理、乘积模糊推理和中心平均去模糊法,模糊混沌系统可以推导成如下形式:
式中:θ(t) =[θ1(t),θ2(t), ⋅⋅⋅,θm(t)];;。
模糊权函数μl(θ(t))满足:
同步误差为:
式中,e(t)=(e1(t),e2(t),...,en(t))T。
在模糊规则l(l=1, 2,...,r)下,误差系统为:
式中,u(t)是待设计的有限时间间歇控制器。
如果θ1是Fl1,θ2是Fl2,...,θm是Flm,那么:
式中,对角矩阵Kl是正的控制增益矩阵,l=1, 2,...,r。参数ζ>0 是可调实常数,实数α满足0<α<1,T>0 是控制周期,δ>0 是控制宽度,m∈Z/Z-。向量sgn(e(t))|e(t)|α=(sgn(e1)|e1|α,sgn(e2)|e2|α,..., sgn(en)|en|α)T。
控制器设计如下:
将模糊控制器设计公式(9)代入到误差系统公式(7)中,可以推导出模糊控制系统公式(10)的T-S 模型。
为了进一步讨论方便,首先介绍如下引理。
引理1[20]:假设连续正定函数V(t)满足如下微分不等式:
式中,常数α>0,0<ε<1,那么对于任意给定t0,V(t)满足如下不等式:
式中:
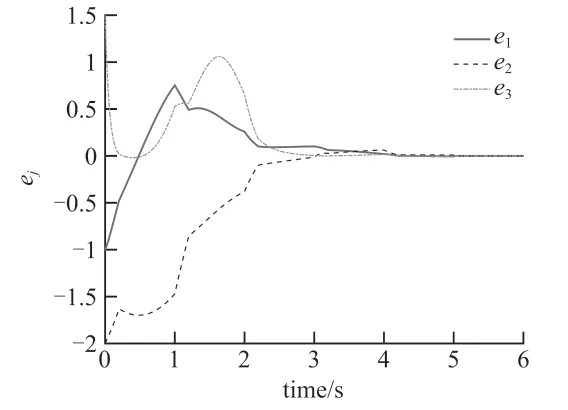
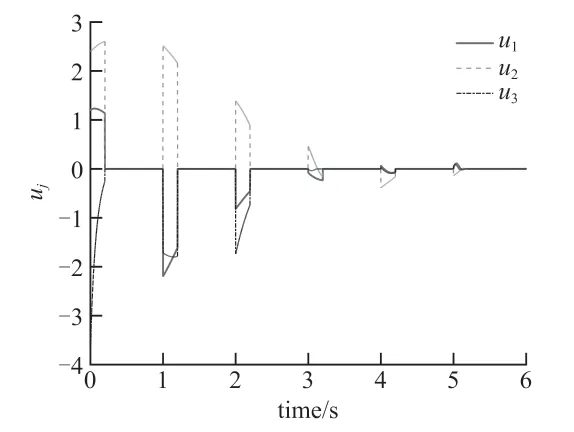
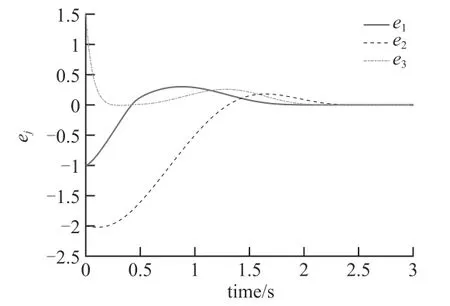
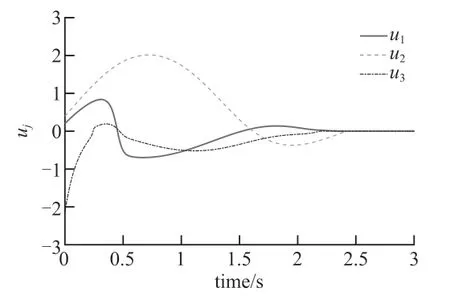
引理2[21]:如果x1,x2,...,xn是任意整数,0 引理3[22]:假设连续正定函数V(t)满足如下微分不等式: 式中,0<ε<1,I>0,κ>0,那么驻留时间t2满足: 引理4[23]:假设函数V(t)在t∈[0, ∞)是连续且非负的,并且满足如下条件: 式中,α,β>0,T>0,0<η,θ<0,那么如下不等式成立: 本节将给出驱动-响应混沌系统式(1)和式(2)实现有限时间同步的结论。 定理1:假设存在正定对角矩阵Kl使得如下不等式成立: 那么在控制器设计公式(9)的作用下,驱动-响应混沌系统式(1)和式(2)在时间tf内可以实现有限时间同步,则有: 证明:构造如下Lyapunov 函数: 情形1:当mT≤t 所以: 其中,sym(Al)=Al+AlT,sym(Kl)=Kl+KlT。根据引理2,则有: 所以: 根据式(19)的条件,则有: 情形2:当mT+δT≤t 简化上述方程可得: 结合式(27)和式(29),可得: 根据引理3,则有: 结合引理4,可得: 证毕。 值得注意的是,如果控制宽度δ=1,那么间歇控制器简化为连续控制输入,有如下推论。 推论1:假设存在正定对角矩阵Kl使得如下不等式成立: 那么利用控制器设计公式(9)和驱动-响应混沌系统式(1)和式(2)在时间te内实现有限时间同步,则有: 本节中,我们将利用数值计算说明驱动-响应混沌系统式(1) 和式(2)的有限时间同步控制结论。不失一般性,选择Chen 混沌系统进行仿真。 当参数α=0.2、β=5.7 时,系统是混沌的。选择x1、x3作为观测变量,通过计算,可知变量x1和x3的取值区间分别是[-9.2 11.5]和[0.01 22.96]。矩阵Ai,i=1, 2 分别表示为: 进一步,特征值分别为:λmax(sym(A1))=0.039 1,λmax(sym(A2))=28.504 2,所以可知λA=28.504 2。根据条件式(19),反馈矩阵分别取为:K1=diag{29 0.6 0.3},K2=diag{28.6 0.3 0.2};模糊权函数μl(θ(t))在l=1, 2 时分别为:μ1(θ(t))=(1+2 sin2t)/3,μ2(θ(t))=2 cos2t/3。调节因子ζ=1.5,正指数α=0.5。仿真过程中,间歇控制器设计公式(9)的参数分别取为:T=1,δ=0.2。系统初始条件为:x(0)=[2 -1 3],y(0)=[1 -3 4.5],迭代步长h=0.000 1。 数值仿真结果如图1 ~图6 所示。图1 展示了驱动-响应系统的同步误差演化过程,可以看到系统的状态在有限时间内趋于0,这与理论分析结果一致。图2 是模糊周期间歇控制器的状态,该控制器在有限时间内稳定到0。而且,当增加反馈控制增益的值由K1=diag{30 2 1}到K2=diag{29.6 1.3 1.2}时,通过仿真发现,反馈增益越大,实现同步的时间越短。仿真结果如图3 和图4 所示。 图1 驱动-响应系统的误差系统状态 图2 模糊周期间歇控制器的状态 图3 反馈控制增益增加时的误差系统状态 图4 反馈控制增益增加时模糊间歇控制器的状态 当控制宽度δ=1 时,间歇控制器转化为连续控制输入,相应的系统误差演化与间歇控制器的状态如图5 和图6 所示,其参数选取与图1 和图2 相同。 图5 模糊连续控制作用下的误差系统状态 图6 模糊连续控制作用下控制器的状态 本文研究了周期间歇控制作用下驱动-响应混沌系统的有限时间同步问题。通过加入合适的外部模糊间歇控制作用,受控模糊混沌系统在有限时间内实现了同步,控制效果理想。进一步,通过仿真发现,同步时间随着反馈增益的增大而缩短。后续将继续考虑非周期间歇控制作用下混沌系统的固定时间同步问题。2 模糊间歇同步控制
3 数值仿真


4 结 语
