水电站生态调度操作门机动力学分析与安全性评价
2024-01-22方子帆邱名岱
方子帆 赵 爽 邱名岱 周 益 周 宇 张 宇
(1.三峡大学 机械与动力学院, 湖北 宜昌 443002;2.中国长江电力股份有限公司 溪洛渡水力发电厂, 云南昭通 657300;3.水电机械设备设计与维护湖北省重点实验室(三峡大学), 湖北 宜昌 443002)
生态调度是兼顾河流生态需求,与水电站的防洪、发电等社会服务功能统筹协调来优化水电站的运行调度方式.考虑生态因素约束条件下的水电站生态调度,对维护河流生态健康、促进人水和谐与取得社会经济效益,具有十分重要的意义.目前,水电站的生态调度分层取水,主要是通过操作门机提落叠梁门取上中层水,以调节出库水温.操作门机是一类门式起重机,也是典型的非线性欠驱动系统,小车的运行过程会引起柔性结构振动和负载摆动,影响作业定位精度并带来安全隐患,降低门机运行性能[1-2].因此,有必要对操作门机结构振动和负载摆动的动力学特性和影响因素进行深入研究.
目前,国外学者采用有限元直接积分法对结构动力学进行求解.Younesian等[3]研究移动门式起重机的非线性振动,通过有限元法求解结构的非线性耦合控制方程,得到小车和吊重质量对结构线性和非线性响应的影响.Gasic等[4-5]采用有限元法和解析法建立起重机的多种移动荷载模型,通过计算各模型在等效移动荷载作用下的受迫振动响应,对比分析各模型计算结果.Zrnic等[6]采用有限元法和解析法建立含移动荷载二维惯性效应的系统运动微分方程,研究小车速度、加速度和结构阻尼对结构振动响应的影响.
国内学者对移动质量作用下梁的动力学响应展开了研究.刘华森等[7]建立柔性梁、移动小车以及欠驱动荷载共同组成的多体刚柔耦合动力学系统,研究荷载质量与小车运行速度对起重小车驱动力和驱动功率的影响.Liu等[8]将桥式起重机的耦合系统简化为柔性梁-移动小车-摆动物体过桥梁的耦合动力学模型,分析小车加速度和荷载参数对梁的挠度和荷载摆动的影响.
起重机在多种工况下的不同载荷组合的安全评价缺少研究.于燕南等[9]对起重机主梁的强度、刚度和稳定性进行有限元分析,验证结构是否满足设计规范要求.熊楚宸等[10]构建150 t造船起重机结构评价指标体系,验证了改进博弈论组合赋权TOPSIS模型用于起重机安全性评价的有效性.以上起重机的安全评价研究主要集中在结构分析上,依然缺乏完整科学的评价体系.因此,对操作门机的安全评估进行定量、定性研究对于生态调度具有重要意义.综上所述,利用直接积分法求解结构动力学和移动质量通对桥梁的耦合振动都已被深入地研究.本文在此基础上,基于模态综合法和有限元法构建某水电站生态调度操作门机刚柔耦合动力学仿真模型,通过小车作业可视化仿真得到系统的动态响应,研究小车运行的速度和加速度、起升重量和绳索摆长对系统动力学特性的影响,最后构建操作门机安全评价体系,以安全指标雷达图的形式,可视化地评价不同工况下的安全性.
1 操作门机虚拟样机模型
以某水电站生态调度操作门机为研究对象,建立其虚拟样机仿真模型,主要由门架金属结构、轨道、起重小车、起升机构、行走机构、电气设备等组成.
1.1 带轨道的门架结构动力学模型
对带轨道的门架结构进行ANSYS模态分析后基于模态综合法建立降阶模型,建模过程如图1 所示.降阶模型是结构动力学分析的关键之一,主要包括结构的动力学特性参数如振型、频率和阻尼比.降阶模型的结构组成如图2所示.
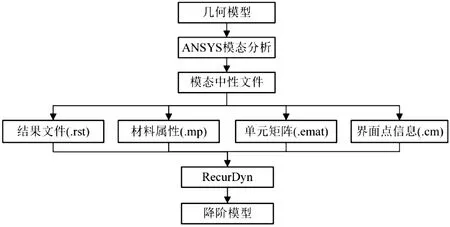
图1 带轨道的门架结构降阶模型建模流程

图2 带轨道的门架结构降阶模型
取带轨道的门架结构降阶模型的前6阶模态进行分析,其模态分析结果见表1.采用振型分析法,考虑结构前几阶振型可满足仿真需求和求解精度.带轨道的门架结构的振动位移主要受前6阶振动模态的影响.其中,第1阶模态主要表现为水平振动形态,第5阶和第6阶模态主要表现为垂直振动形态.因此,取前6阶模态叠加得到振动位移,能够确保带轨道的门架结构动力学计算模型的高保真度,提高仿真求解效率.
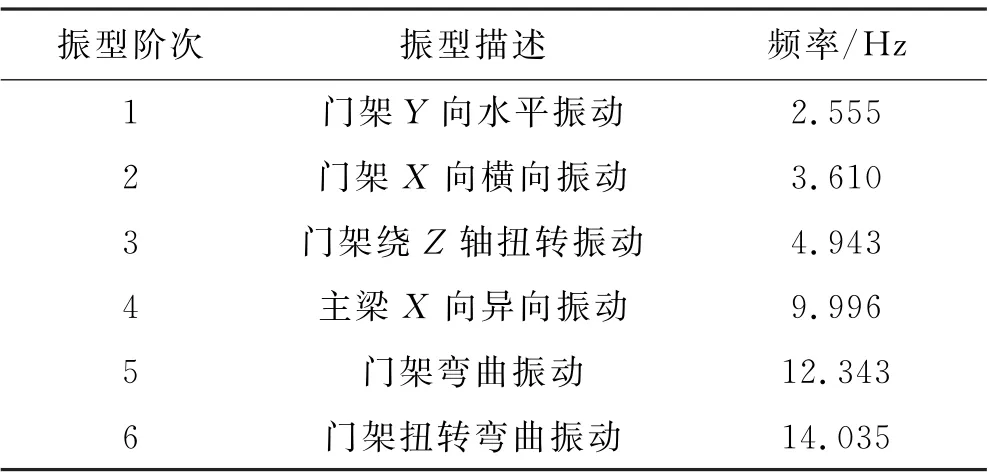
表1 带轨道的门架结构模态参数
1.2 绳索结构动力学模型
绳索、起重小车、卷筒、吊具、抓梁、叠梁门等结构件连接构成欠驱动系统,此系统属于带摆移动荷载模型,如图3所示,具有强耦合、高度非线性等特点.

图3 带摆移动荷载模型
由于降阶模型无法分析非线性、大变形等问题,因此,将绳索处理为有限元柔性体模型.在ANSYS中利用梁单元BEAM4对三维线体进行单元划分,写出*CBD 文件,导入Recur Dyn中,设置材料属性和定义截面属性,得到三维空间缠绕的绳索有限元柔性体仿真模型[11].绳索有限元模型的仿真参数见表2.
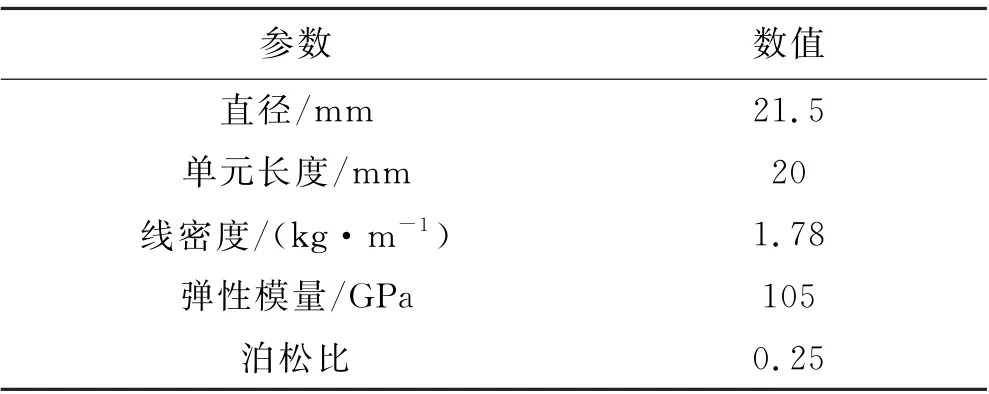
表2 绳索结构有限元模型参数
1.3 操作门机刚柔耦合动力学仿真模型
对带轨道的门架结构和绳索进行柔性化处理,其余均作为刚性体.将带轨道的门架结构降阶模型、绳索有限元模型和刚性体模型通过添加约束、添加运动副、创建接触得到操作门机刚柔耦合动力学仿真模型,建模过程如图4所示.操作门机虚拟模型包括几何模型、虚拟样机模型、运动学/力学模型的高保真模型,能准确映射物理起重机实体的运动状态和动力学响应.
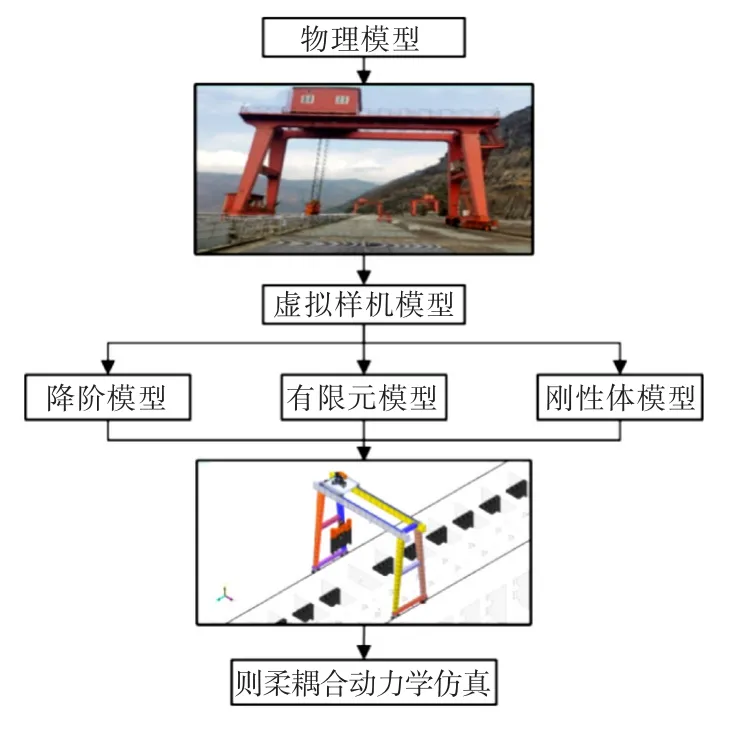
图4 操作门机刚柔耦合模型建模流程
2 基于虚拟样机模型的仿真分析
基于操作门机虚拟样机模型的动力学仿真,研究小车运行的速度和加速度、起升重量和绳索摆长对系统动力学特性的影响.操作门机的主要参数见表3.
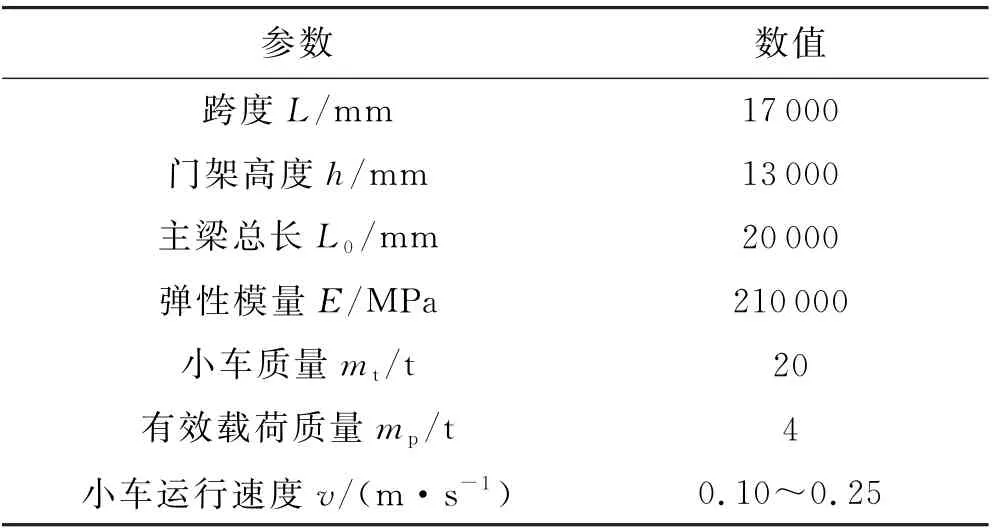
表3 操作门机主要参数
2.1 小车速度和加速度与起升重量对系统动态特性的影响
小车正常运行速度范围:0.10~0.25 m/s.因此,在工程实例中,提出模拟小车运行加速-匀速-减速的实际工况,V1和V2两种驱动模式如图5所示,小车加速和减速的时间均设置为10 s,小车运行轨迹是从左侧极限位置运行至右侧极限位置,小车的期望位移为12.2 m.
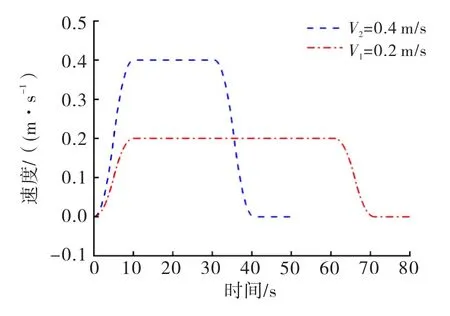
图5 小车的两种运行速度模式
图6是在小车不同运行速度模式的情况下,有效载荷在Y方向运行时摆角的时域响应.V1速度模式下,10~61 s为匀速运行阶段,摆角呈往复周期摆动.有效载荷的摆动周期为:
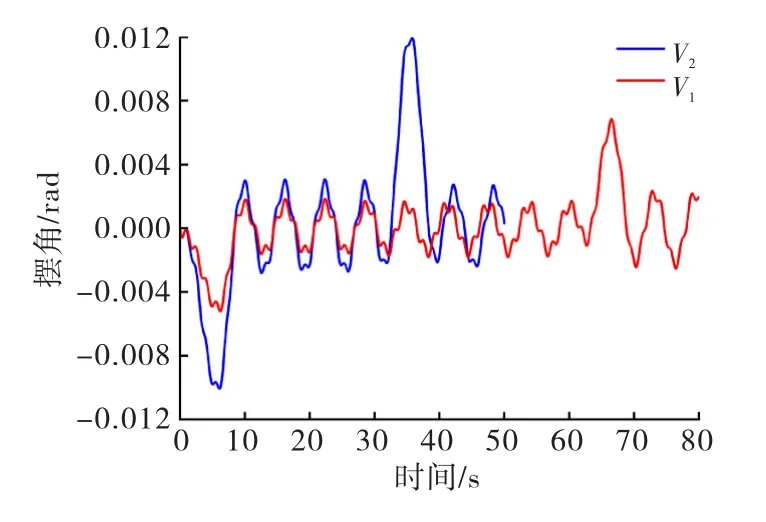
图6 有效载荷在Y 方向的摆动特性
式中:初始绳长l=7.5 m,计算周期为5.494 8 s,与图6匀速运行阶段的摆动周期吻合,证明仿真结果正确.
71~80 s为小车停机制动状态,有效载荷仍有残余摆动,残余摆动的大小直接影响吊重的精确定位并威胁到起重机装卸作业的安全.
根据两种速度模式下的摆角响应,匀速阶段的速度越大,有效载荷的摆动角度越大.同时加速阶段最大摆角分别为-0.005 2 rad、-0.010 1 rad,减速阶段最大摆角分别为0.006 9 rad、0.012 0 rad.在相同的加速和减速时间(10 s)内,加速度越大有效载荷的摆动角度越大.由于V2的加速度大于V1的加速度,使有效载荷受到的惯性力增大,因此摆动的角度增大.减速阶段的摆动幅度略大于加速阶段的摆动幅度.这是由于有效载荷在匀速运动结束时仍有摆动速度,且速度方向与减速运行方向重合.
图7~8是在不同起升重量以及不同小车运行速度的情况下,主梁与支腿在垂直方向和水平方向上的振动位移响应.当小车运行至轨道中心位置附近时,主梁跨中的挠度达到最大值.主梁挠度的变化基本不受小车运行速度和加速度的影响,但随着小车运行速度增大,主梁的垂直振动频率减小.有效载荷的质量会影响主梁与支腿在垂直方向和水平方向上的动态位移幅值.当小车运行速度相同时,不同的起升重量下主梁的变化趋势和振动频率相同.由图8(a)可以看出,有效载荷的摆动导致主梁水平位移在加速和减速阶段出现明显的波峰变化.小车加减速引起的水平惯性力对主梁水平位移的影响尤其突出.
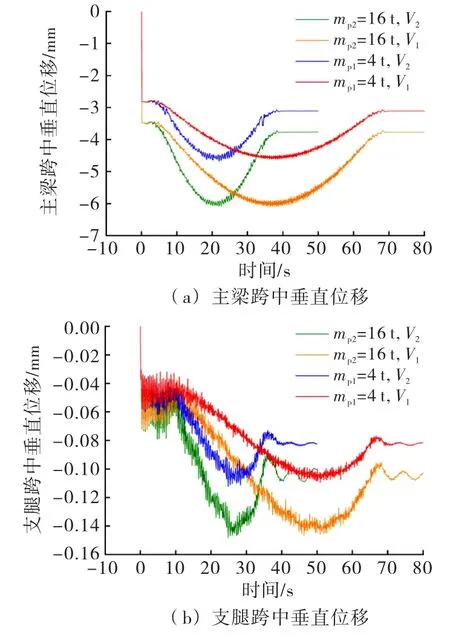
图7 门架垂直位移响应
图9是不同起升重量作用下主梁的三维应力变化规律.小车运行速度和加速度对主梁应力影响不显著,但起升重量与主梁的应力幅值成正比.其中,主梁的中心位置对质量最为敏感.

图9 起升重量对主梁应力的影响
2.2 绳索摆长对系统动态特性的影响
操作门机在进行吊装作业时,首先要进行有效载荷的起升操作,而对有效载荷的起升高度并没有一个标准,那么绳索摆长的差异将会对有效载荷的摇摆偏移产生影响,从而影响结构动力学特性.
图10是在不同绳索摆长情况下有效载荷的摆动特性.有效载荷残余摆动的最大摆幅与摆长成正比.残余摆动对主梁水平位移的影响如图11所示.
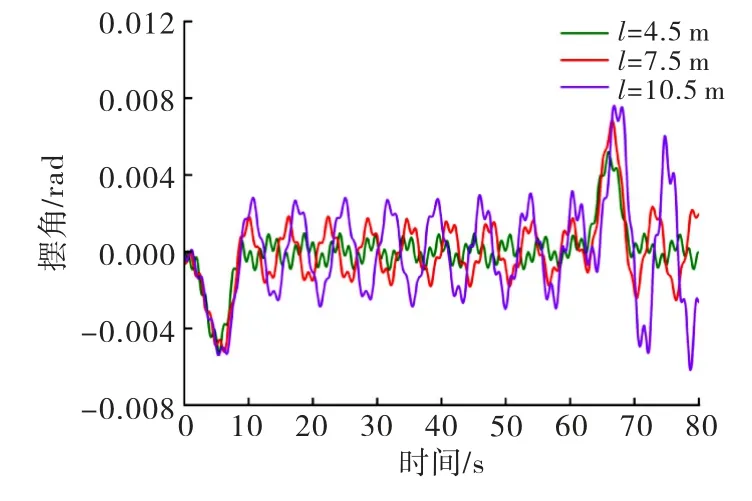
图10 绳索摆长对有效载荷摆角的影响

图11 残余摆动对主梁水平位移的影响
绳索摆长越长,有效载荷残余摆动越大,主梁水平振动位移的波动幅值也越大.有效载荷的惯性力对主梁产生较大的冲击.特别是绳索摆长较长时,这种影响尤为突出.
3 操作门机安全性评价
3.1 安全评价指标
根据操作门机的实际情况将评价指标划分为正指标与逆指标.状态值与构件安全性高低保持一致的评价指标为正指标;相反的为逆指标.考虑到指标间的量纲差异及公度性原则,在不改变指标性质的前提下将评价值值域统一到[0,1],对原始数据进行无量纲化及规格化[12].
正指标:
逆指标:
针对某水电站生态调度操作门机调度过程中的安全状况,选取结构强度、刚度评价指标和动力学性能评价指标,建立操作门机安全评价指标体系[13-14],见表4.
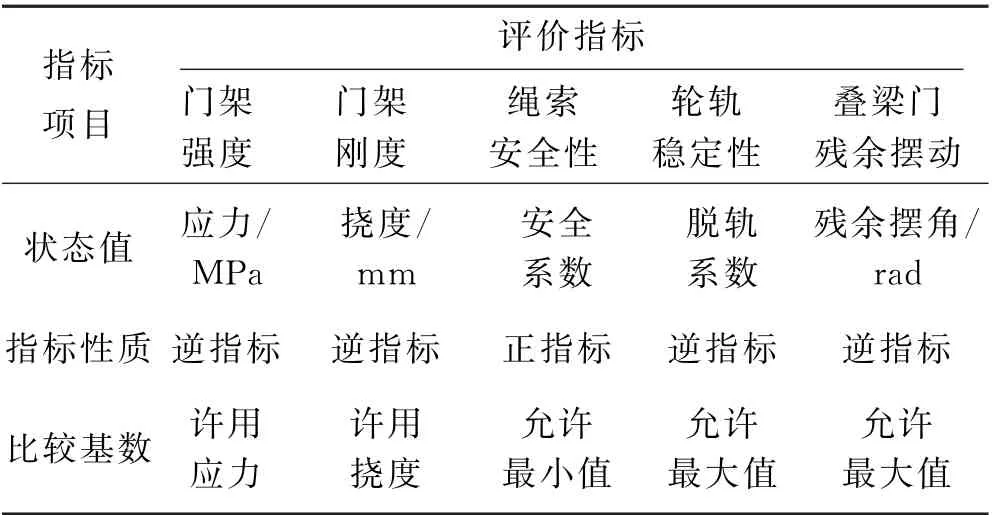
表4 操作门机安全评价指标体系
通过参考材料力学和起重机设计规范,列出5个评价指标对应的比较基数的计算,如下所示.
1)按照GB/T3811—2008起重机设计规范的相关规定,对于σs/σb<0.7的钢材,基本许用应力须满足:
式中:σs为钢材的屈服点;n为强度安全系数;σb为钢材抗拉强度.
强度安全系数n取1.34,Q235屈服点σs为235 N/mm2,[σ]=175.37 N/mm2.
2)双主梁小车以两轮作用于一根主梁上,两个车轮在跨中引起的挠度,按莫尔公式计算:
式中:P为起升载荷与小车自重之和,不计冲击系数、动力系数、主梁自重;L为主梁跨度;E为主梁钢材的弹性模量;I为主梁竖直方向惯性矩.
式中:C为小车轮压用它们作用于跨中的合力计算挠度的换算系数;b为小车基距.
对于操作门机,为了降低小车运行坡度,门架结构满足控制系统高精度定位的刚度要求为f L≤L/1 000,带入主梁跨度,L=17000 mm,f L≤17 mm.
3)根据钢丝绳安全系数法,当小车运行时,钢丝绳最大工作应力需满足下式:
式中:n为安全系数;σ1为钢丝的公称抗拉强度;σ为钢丝绳的最大工作应力.
钢丝绳所在起升机构的工作级别为M3,故钢丝绳的允许安全系数[n]=3.55.
4)小车运行时,不同起升质量和不同小车运行速度的组合可能导致轮轨出现卡轨或脱轨的现象.轮轨运行的安全性和稳定性,由脱轨系数Q/P≤1 来评价.Q为作用在车轮上的横向力,P为作用在车轮上的垂向力.车轮与轨道的接触印迹如图12所示.

图12 车轮与轨道接触印迹
5)小车停机制动后,叠梁门存在残余摆角,为满足叠梁门生态调度的入槽定位要求,避免入槽卡阻现象发生,在设计门机的起升机构时,提出摆角θ的安全范围需满足-0.017 5 rad≤θ≤0.017 5 rad.
3.2 安全性评价
基于操作门机刚柔耦合动力学仿真模型计算出4种工况下安全评价指标的状态值,对其进行无量纲化得到对应的评价值见表5,安全评价雷达图如图13所示.

表5 操作门机不同工况下评价指标的评价值
从表5和图13可以看出,工况1的综合评价值的面积最大,说明整机安全状态较好.起升重量是强度指标和刚度指标的重要影响参数.同一起升重量下,脱轨系数的评价值随小车速度的增大而减小,轮轨稳定性变差;同一小车速度下,脱轨系数的评价值随起升重量的增加而增加,轮轨稳定性变好.此外,叠梁门残余摆动的评价值与其质量和小车速度成反比,小车具有较大速度和加速度的情况下,不能忽略叠梁门惯性力的影响.
4 结 论
以某水电站生态调度操作门机为研究对象,基于ANSYS和Recur Dyn 建立整机刚柔动力学仿真模型,研究小车运行速度和加速度、起升重量、绳索摆长等参数对有效载荷摆动以及门架结构振动的影响;通过构建操作门机安全评价指标体系,评价不同工况下的安全性.得到以下结论:
1)带轨道的门架结构的振型主要受到前6阶低级模态的影响,其中,第1阶模态对结构的水平振动贡献最大,第5和第6阶模态对结构的垂直振动贡献最大.
2)在相同的加速和减速时间内,有效载荷摆角随小车速度增大而增大,由于绳索摆长影响有效载荷的摆动周期,加减速时间对有效载荷摆角的影响较为复杂,需要进一步研究.
3)主梁在垂直方向上的动态位移和动态应力变化基本不受小车运行速度和加速度的影响.小车运行速度和加速度对主梁水平位移的影响明显大于对垂直位移的影响.绳索摆长越长,有效载荷残余摆动越大,主梁水平振动位移的波动幅值也越大.
4)基于某水电站生态调度操作门机刚柔耦合动力学仿真模型计算出评价指标的评价值,以雷达图的形式可视化地判定起重机的运行状态,为起重机的安全性评价与使用维护提供一定的理论依据.
