基于PLC伺服控制的雷达转台系统的设计与实现
2024-01-20谷成雨
谷成雨

关键词:转台;控制器;伺服;编码器;汇流环
中图分类号:TP29 文献标识码:A
0引言
本文设计的伺服控制系统以万可公司的750系列PLC(programmable logic controller,可编辑逻辑控制器)作为控制器,该控制器支持750/753系列的数字量、模拟量以及专用模块的扩展,能够达到10/100 Mbit/s的数据传输速率。本文主要介绍了基于控制器伺服控制系统的雷达转台的设计与实现方法,其具有远程控制功能,能实现无人值守功能;同时还设计了应急手动控制功能,实现了本地控制雷达转台的旋转,可以在应急情况下使用该功能。
1系统基本组成与工作原理
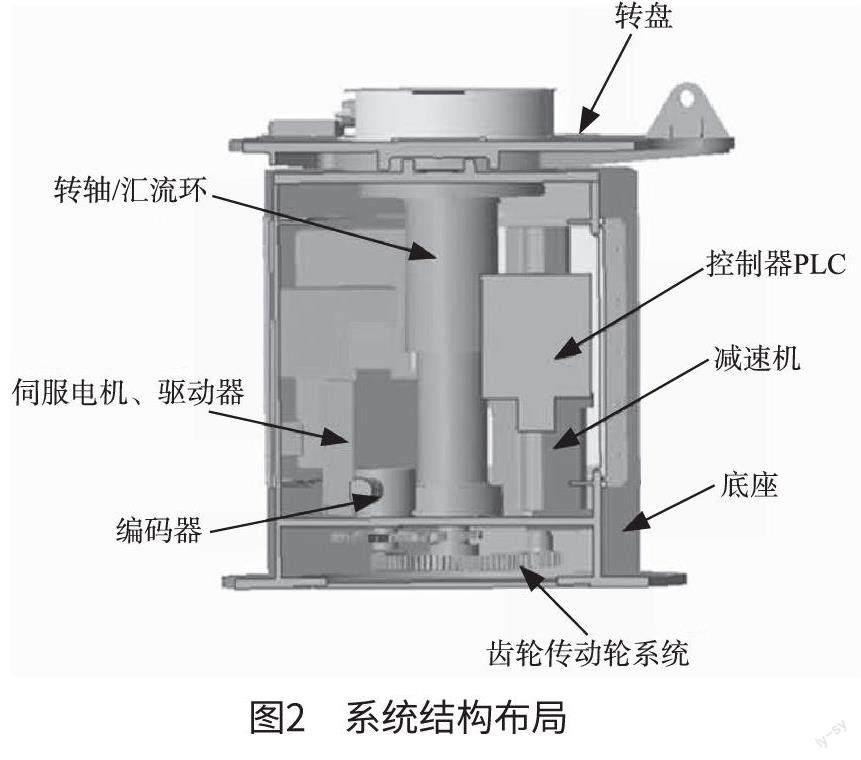
本雷达转台主要由伺服控制器、驱动器、方位电机、减速机、齿轮、转轴/汇流环、转盘、双路编码器等组成。雷达转台工作原理框图如图1所示。本雷达转台的伺服控制系统、传动齿轮以及汇流环都布置在雷达系统底座内部。首先,向终端显示控制设备输入指令,经过转轴/汇流环到上位机,解析编码后,将指令发送到伺服控制器。其次,通过驱动器控制方位电机,带动转轴和转盘同步旋转,从而达到雷达天线阵面方位旋转的目的。最后,双路编码器通过读取减速机参数获得实时的旋转方位角度信息,并形成双路SSI(同步串行)信号,一路到伺服控制器,另一路经过汇流环到上位机,解析编码后,将角度信息显示在终端设备上。指令一般包括开始、转速、顺/逆时针旋转、定位停及停止等。本系统具有远程遥控或本地控制模式,远程遥控模式通过网络连接终端设备,可远距离进行显示与控制;针对本地控制模式设计了一个具有应急手动控制功能的设备,通过网络传输指令到伺服控制器,直接驱动雷达天线阵面旋转,可以在应急情况下使用该功能。
2系统结构布局设计
选用PLC作为核心主控制器,其通过I/O(输入/输出)模块实时控制方位电机,通过上位机RS422(平衡电压数字接口电路的电气特性)接口的全双工差分传输,从而控制雷达天线阵面的不同转速、扇扫和定位等功能参数。伺服控制系统实时接收并监控上位机发来的雷达运转指令,根据指令驱动雷达天线阵面方位旋转。在雷达天线运转时,PLC通过编码器计算雷达的实时角度,并定时向监控上位机发送一次雷达转台旋转的方位角度信息。同时,其还具有定位停功能,能够将雷达天线阵面停在指定的方位角度。当远程遥控无法控制雷达天线阵面运转时,还可以通过应急手动控制设备对雷达天线阵面的转速进行控制。系统结构布局如图2所示。
2.1伺服控制器
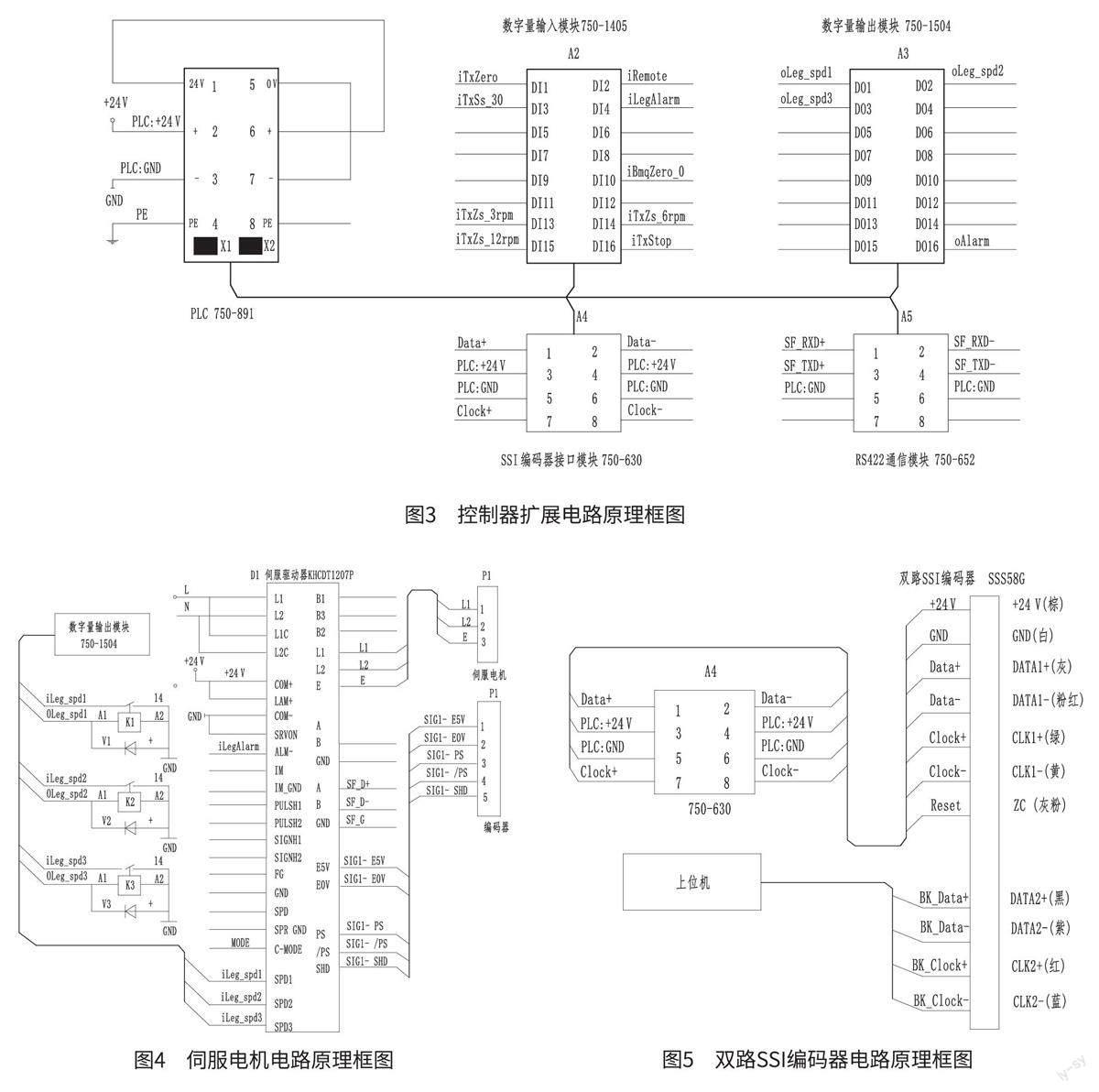
采用万可750-891作为伺服控制系统的核心控制器,该控制器具有较强的指令处理能力、抗干扰性、抗振动以及抗冲击电压等性能,且具有WAGO-I/O-SYSTEM模拟量与数字量模块可扩展功能。控制器扩展电路原理框图如图3所示。
2.2驱动方案
本系统采用的是伺服驱动、交流伺服电机的驱动方案,该方案成熟可靠,具有体积小、扭矩大、驱动负载强等优点,并具有良好的矩频特性,保证低速出力均匀。交流伺服电机采用上海安翰自动化设备有限公司的MUMD022KIUX电机,该伺服电机具有宽泛的功率范围、优异的电磁兼容特性、完善的保护功能以及误差反馈跟随功能。伺服电机电路原理框图如图4所示。
2.3方位编码器选型设计
方位編码器用于计算雷达天线的实际运转角度,本系统选用江苏杰瑞公司型号为SSS58G的编码器,同时输出双路SSI接口的编码角度信息。一路信号传输到伺服控制系统,另一路信号传输到上位机。双路SSI编码器电路原理框图如图5所示。
2.4转轴/汇流环
汇流环的任务是完成雷达天线阵面转动部分设备与固定部分功率、控制信号以及网络信号等的旋转传输,其具体功能是实现雷达地面固定设备与雷达天线阵面旋转设备之间交流功率的传输以及控制信号、数据的传输。
为实现传动功能,采用汇流环主轴和传动转轴共用的传动方式,壳体内轴材质选用不锈钢,外圈选用铝合金,以满足内圈承重和内圈径向承载扭矩的要求。汇流环采用柱式结构,导电环一刷丝电接触结构简单,可靠性高,长时间工作落粉少,无须维护。
2.5应急手动控制
本系统具有应急手动控制功能,对雷达天线阵面的工作状态进行本地控制。可以实现雷达天线阵面转速、天线零位以及停止的控制。应急手动控制电路框图如图6所示,C为公共端,NO为常开触点。
3系统软件设计
本系统软件充分利用了PLC产品结构化、模块化的特点。按照系统软硬件要求,软件设计成多个相对独立的任务模块,各模块之间按照接口通信协议,相互传递信息。
该软件遵循网络UDP(用户数据包协议),提供通过网线自定义网口数据协议,访问上位机的底层软件接口。这种PLC软件设计的典型模式,可以最大限度地保证软件的标准化、通用性以及移植性。其控制方式较为简单,根据对终端发来的天线运转指令,实现对伺服电机直接控制。其程序控制流程如图7所示。
4结语
本文采用PLC作为伺服控制系统的控制器,结合伺服电机、编码器、汇流环、传动齿轮等部件进行了雷达转台的设计与实现。将汇流环主轴和传动转轴共用,带动转盘旋转,实现了雷达天线阵面的旋转,同时将伺服控制系统集成到转台内部,满足雷达转台重量轻、体积小、集成化高的要求,具有较好的应用前景和经济价值。
