达芬奇手术机器人系统在胃癌根治性切除术患者治疗中的效果观察
2024-01-19梁峰福建医科大学附属第一医院福建福州350000
梁峰 福建医科大学附属第一医院 (福建 福州 350000)
内容提要: 目的:探讨达芬奇手术机器人系统在胃癌根治性切除术患者治疗中的应用价值。方法:选取2020年1月~2021年12月本院胃癌根治性切除术患者80例,按随机法分为观察组与对照组,各40例。对照组采用腹腔镜下胃癌根治性切除术,观察组采用达芬奇手术机器人系统配合胃癌根治性切除术开展。对比两组手术情况、术后情况、炎性因子水平(C反应蛋白、白细胞介素-6)、免疫功能[T淋巴细胞亚群(CD4+、CD8+)水平]及并发症发生率。结果:观察组术中出血量、淋巴结清扫总数及第一站淋巴结清扫数量均少于对照组(P<0.05);观察组首次排气、进食时间及引流管拔除时间短于对照组,术后引流量少于对照组(P<0.05);术后3d,观察组C反应蛋白、白细胞介素-6水平低于对照组(P<0.05);术后3d,观察组CD4+水平高于对照组,CD8+水平低于对照组(P<0.05);观察组并发症发生率7.50%与对照组15.00%对比无显著差异(P>0.05)。结论:达芬奇手术机器人系统应用于胃癌根治性切除术患者可改善围手术期情况,缓解炎症,提升免疫功能,存在安全性。
胃癌作为临床多发恶性肿瘤疾病,伴随社会环境恶化、居民生活习惯紊乱等因素影响,该病发病率逐年增加,患者可存在上腹部泛酸、食欲不振等早期状况,后期可存在腹水、肿块和黑便等临床体征,针对该状况需采取手术切除治疗[1]。伴随临床医学技术不断进步,微创手术越来越广泛地应用于临床,其具有患者术后恢复快、手术创伤小及对人体免疫损伤轻微等诸多优点,但微创手术操作也属于二维视野,术野范围不大,且术中操作缺乏灵便度,不利于消化道重建,存在一定局限性[2]。达芬奇手术机器人系统立足于腔镜有关技术操作,属于主从式操作系统,存在控制台、成像系统和床旁手术器械臂等,能有效提高临床手术操作的精准度和便捷性。本研究选取本院胃癌根治性切除术患者80例,探讨达芬奇手术机器人系统的应用价值。
1.资料与方法
1.1 临床资料
本研究选取2020年1月~2021年12月本院收治的胃癌根治性切除术患者80例,按随机法分为观察组与对照组,各40 例。对照组:男23 例,女17 例;年龄46~71 岁,平均(56.87±4.52)岁;肿瘤直径2~7cm,平均(4.23±0.42)cm;体重指数19~28kg/m2,平均(22.68±1.52)kg/m2。观察组:男22例,女18例;年龄46~72岁,平均(56.62±4.48)岁;肿瘤直径2~7cm,平均(4.21±0.43)cm;体重指数19~28kg/m2,平均(22.59±1.54)kg/m2。两组基线资料均衡可比(P>0.05)。
纳入标准:①经电子胃镜、组织性活检等检查确诊为胃癌;②存在上腹部包块、食欲减退、消瘦及恶病质等临床表现者;③未发生远处转移者;④符合手术操作指征者;⑤临床有关资料齐全者。排除标准:①合并多原发肿瘤者;②心肝肾等脏器严重损害者;③腹腔广泛粘连者;④需开展有关急症手术治疗者。
1.2 方法
对照组:采用腹腔镜下胃癌根治性切除术。术前对患者开展血压、心率等检查,确定肿瘤具体位置和大小等状况。气管插管全身麻醉,平卧位,构建气腹,腹压在13mmHg。脐孔下缘进行穿刺,将套管10mm留置其中为观察孔。主操作孔在左腋前线肋缘下2cm穿刺置入套管10mm。牵引孔是在左、右锁骨中线平脐上方2cm穿刺置入套管5mm、15mm,放入腹腔镜下切割吻合器,右腋前线肋缘下2cm放入套管5mm形成牵引、暴露肝脏。超声刀离断网膜,开启淋巴结清扫。
观察组:采用达芬奇手术机器人系统下配合胃癌根治性切除术开展。术前对患者开展血压、心率等检查,确定肿瘤具体位置和大小等状况。利用达芬奇手术机器人系统开展术式治疗,参照患者胃切除状况进行消化道重建。气管插管全身麻醉,脐孔穿刺,将Trocar观察镜12mm置入,作为操作观察孔。构建压力在10~12mmHg的气腹,在左、右腋前线肋缘下方和左、右锁骨中线平脐下处2cm均进行穿刺,W型五孔状。对左、右腋前线肋缘下,左锁骨中线平脐下处2cm将Trocar8mm置入其中,使其为机器人1、2、3号机械臂操作孔。2、3号机械臂需配合1号操作臂暴露,主操作臂是1号,与超声刀系统关联。Trocar观察镜12mm应当在右锁骨中线平脐下处2cm,完成术中胃切除和有关淋巴结清扫。
1.3 观察指标与判定标准
①两组手术情况对比,记录对比两组术中出血量、淋巴结清扫总数及第一站淋巴结清扫数量状况。②两组术后情况对比,记录对比两组首次排气、进食时间、引流管拔除时间及术后引流量。③两组炎性因子水平对比,术前、术后3d,C反应蛋白、白细胞介素-6水平。④两组免疫功能对比,术前、术后3d,T淋巴细胞亚群(CD4+、CD8+)水平。⑤两组并发症发生率对比,记录对比两组血管损伤、脏器损伤及吻合口瘘发生率。
1.4 统计学分析
2.结果
2.1 两组手术情况对比
观察组术中出血量、淋巴结清扫总数及第一站淋巴结清扫数量均少于对照组(P<0.05)。见表1。
表1.两组手术情况对比(n=40,±s)
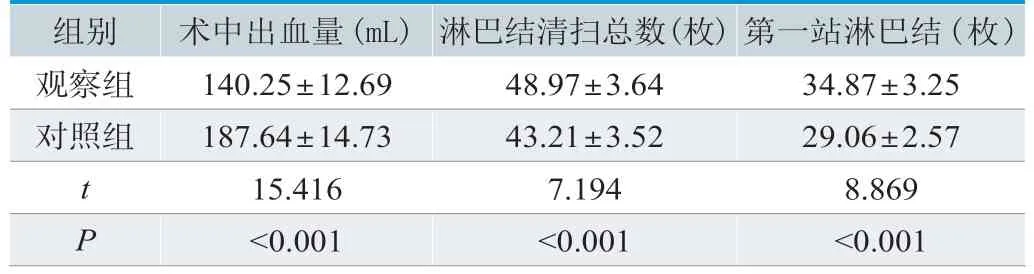
表1.两组手术情况对比(n=40,±s)
组别术中出血量(mL) 淋巴结清扫总数(枚) 第一站淋巴结(枚)观察组140.25±12.69 48.97±3.64 34.87±3.25对照组187.64±14.73 43.21±3.52 29.06±2.57 t 15.416 7.194 8.869 P<0.001<0.001<0.001
2.2 两组术后情况对比
观察组首次排气、进食时间及引流管拔除时间短于对照组,术后引流量少于对照组(P<0.05)。见表2。
表2.两组术后情况对比(n=40,±s)
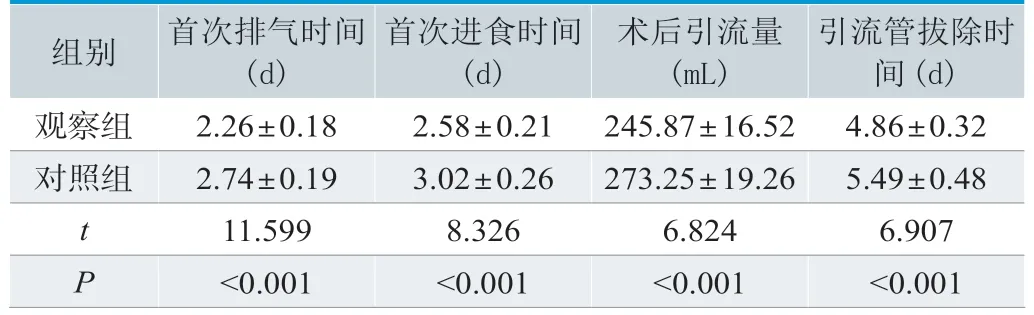
表2.两组术后情况对比(n=40,±s)
引流管拔除时间(d)观察组2.26±0.18 2.58±0.21 245.87±16.52 4.86±0.32对照组2.74±0.19 3.02±0.26 273.25±19.26 5.49±0.48 t 11.599 8.326 6.824 6.907 P<0.001<0.001<0.001<0.001组别首次排气时间(d)首次进食时间(d)术后引流量(mL)
2.3 两组炎性因子水平对比
术后3d,观察组C反应蛋白、白细胞介素-6水平低于对照组(P<0.05)。见表3。
表3.两组炎性因子水平对比(n=40,±s)
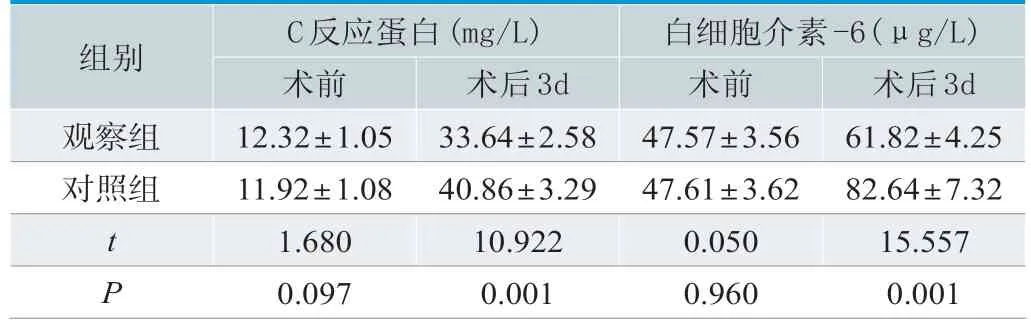
表3.两组炎性因子水平对比(n=40,±s)
组别C反应蛋白(mg/L)白细胞介素-6(μg/L)术前术后3d术前术后3d观察组12.32±1.05 33.64±2.58 47.57±3.56 61.82±4.25对照组11.92±1.08 40.86±3.29 47.61±3.62 82.64±7.32 t 1.680 10.922 0.050 15.557 P 0.097 0.001 0.960 0.001
2.4 两组免疫功能对比
术后3d,观察组CD4+水平高于对照组,CD8+水平低于对照组(P<0.05)。见表4。
表4.两组免疫功能对比(n=40,±s,%)
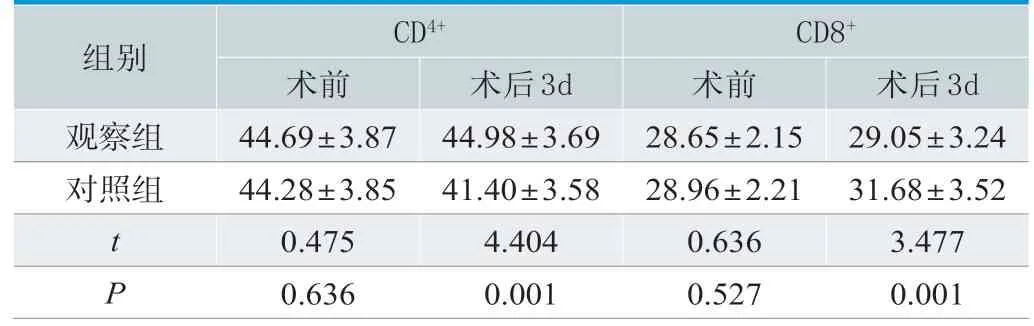
表4.两组免疫功能对比(n=40,±s,%)
组别CD4+CD8+术前术后3d术前术后3d观察组44.69±3.87 44.98±3.69 28.65±2.15 29.05±3.24对照组44.28±3.85 41.40±3.58 28.96±2.21 31.68±3.52 t 0.475 4.404 0.636 3.477 P 0.636 0.001 0.527 0.001
2.5 两组并发症发生率对比
观察组并发症发生率7.50%与对照组15.00%对比无显著差异(P>0.05)。见表5。
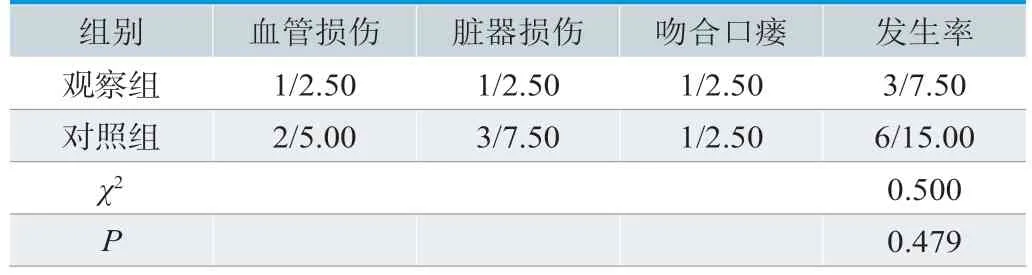
表5.两组并发症发生率对比(n=40,n/%)
3.讨论
胃癌属于临床多见恶性肿瘤疾病,其发病率和病死率均较高,该病可发生在身体内的任何部位,多发于胃窦部,早期无典型临床表现,可存在嗳气、上腹部隐痛等临床表现,后期可存在腹部肿块、腹水和重度营养缺乏等状况,严重危害患者身体健康,临床针对该病多采取手术切除方式治疗[3]。伴随微创技术的进展,腹腔镜手术也逐步走入大众视野内,该术式仅需小切口就能探查到腹腔内的情况,能有效帮助医师开展手术操作,术后对患者造成的免疫损伤轻微,能促进患者恢复,但该术式也存在着对腹腔内术野探查不清,空间狭窄等状况,不利于清扫淋巴结组织。手术机器人系统属于当前新型手术操作方案,规避了既往腹腔镜术式的二维视野操作的缺陷,其为三维视野能给医师形成一个更广阔的操作空间,减少操作的局限性。
本研究针对本院胃癌根治性切除术患者采用达芬奇手术机器人系统治疗,结果显示,观察组术中出血量、淋巴结清扫总数及第一站淋巴结清扫数量均少于对照组,观察组首次排气、进食时间及引流管拔除时间短于对照组,术后引流量少于对照组(P<0.05),提示采用该术式可改善患者围手术期情况。分析其原因在于,达芬奇手术机器人系统能于狭窄的空间范围内为患者提供更为稳定的操作术野,能更好地显露出患者病灶位置和具体情况,能实现更为精准细致的解剖。机器人的介入能实现灵活的手术器械活动度,减少腹腔镜下操作的笔直的器械、避免其受限活动度,能减少术中出血,减轻对人体的损伤,利于其术后恢复,缩短首次排气、进食时间及引流管拔除时间。常规的腹腔镜术式操作时如果需要进行分离解剖、淋巴结清扫时进行充分显露,会对腔内周围脏器和组织器官形成损害,增强给人体带去的损害,通过应用机器人系统操作可以规避该类状况,其手术操作更为精细,能有效减少给人体带去损伤,降低术中应激反应,帮助患者恢复,且该术式借助机器人三维观察能更有效地发现并全面清除淋巴结,增加淋巴结清扫总数[4]。本研究结果显示,术后3d,观察组C反应蛋白、白细胞介素-6水平低于对照组(P<0.05),术后3d,观察组CD4+水平高于对照组,CD8+水平低于对照组(P<0.05),提示采用该术式可缓解炎症,改善免疫功能。分析其原因在于,达芬奇手术机器人系统存在高清的三维手术操作视野,对比腹腔镜二维术野更为清楚,能帮助医师有效探查到患者腔内情况,采取精准的手术操作,该机器人手臂灵活精细,能在位置较深及手术操作空间狭窄的场合中存在更为精细化的操作,该操作器械能有效避免手震颤等不必要手术失误出现,能适应更为复杂的手术操作,术中给患者带去的人体损伤小,能减轻术后炎症状况,有利于患者术后恢复,利于其免疫功能调节[5]。此外,本研究结果还显示,观察组并发症发生率7.50%与对照组15.00%对比无显著差异(P>0.05),提示采用该术式存在安全性。分析其原因在于,达芬奇手术机器人系统存在更理想的精确度和稳定度,给患者腹腔脏器和组织牵拉度更低,造成的内环境破坏,引发的应激反应小,更能减少对患者的创伤,术后并发症发生率低,存在安全性。
综上所述,达芬奇手术机器人系统应用于胃癌根治性切除术患者可改善围手术期情况,缓解炎症,提升免疫功能,存在安全性。
