基于摄影测量的多瓣液压抓斗运动监测系统设计及应用分析
2024-01-18王一鸣张卫东冯海盈
王一鸣 张卫东 冯海盈
(河南省计量测试科学研究院,河南 郑州 450000)
0 引言
多瓣液压抓斗是通过液压动力源提供动力,驱动多个颚板的开合抓取和卸出散状物料的一种装卸或挖掘工作装置,是散货起重设备和挖掘设备的核心附加属具,也是一种用途广泛的液压类专用设备[1]。
目前国内对多瓣液压抓斗的研究主要是基于虚拟样机技术进行抓斗的设计参数分析、运动轨迹仿真模拟和颚板的参数设计,但缺少在实际工况下对多瓣液压抓斗运动过程的监测。考虑到多瓣液压抓斗主要针对矿石、煤炭、水泥、生活垃圾等散货物料,其实际工作现场环境通常比较恶劣[2-8]。为了保证抓斗运行的平稳可靠,避免因设备故障导致的停机事故,提高抓取效率,需要对液压抓斗运动过程进行在线监测[9]。
因此,本研究设计了一种基于摄影测量的多瓣液压抓斗运动监测系统,运用双目视觉测量原理,对液压六瓣式起重机抓斗中液压缸与六瓣抓斗的位移和转角进行在线监测。
1 系统组成与工作原理
基于摄影测量的多瓣液压抓斗运动监测系统以2 台高精度实时摄影测量相机为主传感器,并包含长度基准尺、反光标志点等辅助部件,如图1 所示。单个相机的有效视场角为65°,在距离4 m 内的空间测量精度优于0.085 mm,软件系统能够以10 帧/s 的速度对采集到的图像进行实时处理。

图1 监测抓斗运动状态的摄影测量装置
通过软件控制实时采集被测抓斗的2 幅测量图像,经双像前方交会得到工件特征点的三维坐标。使用不同位置的相机对同一物体进行拍摄,获取被测目标的2 张不同角度的图像,从而可得到被测物体的多个立体像对,构成多目立体模型。在双相机测量系统中,对于每个物方点可列出2 个共线方程,根据最小二乘原理,将其联立求解可以得到被测工件上特征点的三维坐标。
本方案采用的是单、双相机联合的测量方法,单相机测量的数据作为抓斗初始状态的参考值,双相机系统实时测量的结果作为测量值,整个测量流程如图2所示。

图2 测量流程
2 现场试验
2.1 布置监测点
被测对象为工程六瓣液压抓斗,额定抓取量为3 m3,自重为3.2 t,主要应用于垃圾处理厂进行生活垃圾的装卸。抓斗张开时最大宽度为4.5 m,抓紧时最大高度为3.1 m。
测试前在起重机固定圆筒表面粘贴足够数量的编码点,如图3 所示,要求编码点布设的位置在起重机固定圆筒上面均匀分布,在起重机液压杆与基座的铰接处及液压杆与抓瓣的铰接处粘贴标志点,用于检测液压缸两端移动量。为保证得到标志点的准确位置,在其旁边粘贴编码点。同时,在抓瓣外表面粘贴编码点用于抓瓣运动轨迹的监测。

图3 已粘贴标志点的六瓣液压抓斗
2.2 单相机系统标定
为保证测量结果的量值准确可靠,首先使用800 mm 基准尺对摄影测量系统进行标定,如图4所示,该基准尺的长度可溯源至中国计量科学研究院。

图4 用于系统标定的800 mm基准尺
在抓斗静止时进行标定,如图5 所示,将基准尺放置在抓斗的适当位置,使相机能够在一幅图像中同时拍摄到抓斗和基准尺,确保标准尺上的标志点不被遮挡。使用单相机在不同位置和方向获取被测工件多幅数字图像,经图像预处理、标志识别与定位、图像匹配、空间三角交会及光束法平差后得到待测点的三维坐标。对三维坐标进行分析得到液压缸和颚瓣在静止状态下的坐标和相对距离,如图6 所示,以此作为动态监测的参考基准。
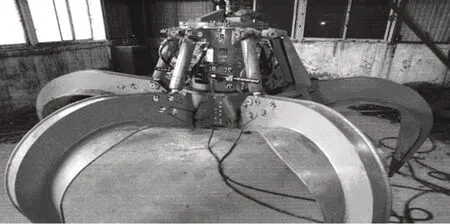
图5 使用基准尺进行系统标定

图6 静止状态下标志点坐标的获取
2.3 双相机实时监测
在测量前,利用400 mm 定向靶对相机进行定向,如图7 所示,以确定两相机之间的位置和姿态。同样地,该定向靶的长度已进行了计量溯源。

图7 用于双相机位姿标定的400 mm定向靶
在保证两个相机相对位置不变的情况下,根据三角交会测量原理,由像点坐标计算得到标志点的三维坐标。在距离抓斗约3 m,高度2 m 处稳定固置双相机,双相机间基线长度为2.5 m 左右,如图8 所示,采用双相机对液压抓斗的运动状态进行实时监测。

图8 双相机系统在抓斗运行时进行实时监测
3 数据处理与分析
对抓瓣的运动状态进行监测,最直接的方式是采集并计算抓瓣表面所粘贴的标志点的坐标。但在实际工况下,为保证抓斗的抓满率,需要使抓瓣切入料堆内部达到一定深度,在这种情况下抓瓣表面的标志点容易被物料遮挡,造成测量不连续。
由于抓瓣在抓取过程中形变较小,可近似认为是刚体结构,因此可以通过对其他关联结构运动状态的监测,并基于抓斗结构的几何关系,计算出抓瓣的运动位置信息,如图9 所示。本研究同时采集液压杆伸出量和铰接点坐标,以保证对抓斗的运动状态的连续监测。

图9 抓斗几何结构示意
3.1 基于液压杆伸出量的运动状态监测
需要在液压缸缸体和柱塞表面分别粘贴标志点,通过两者相对距离的变化来测量液压杆的伸出量,从而计算出液压杆长度和抓瓣转角,如图10 和图11所示。
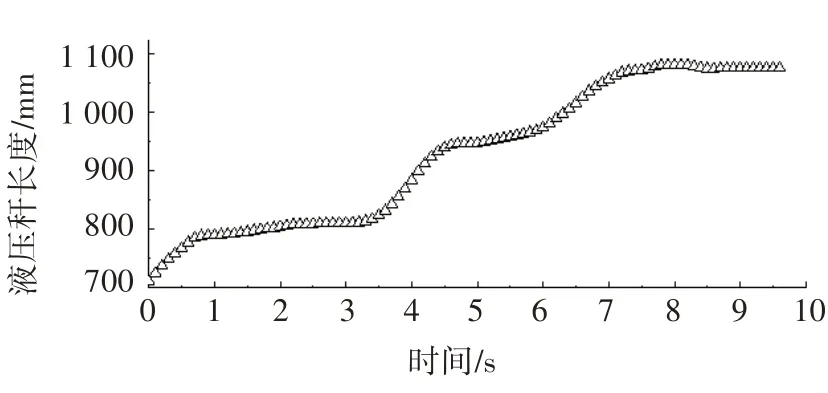
图10 液压杆长度(基于液压缸伸出量)

图11 抓瓣转角(基于液压缸伸出量)
从图中可以看出,抓斗的运行过程并非匀速运动,这是由于在抓取过程中,随着抓斗颚瓣切入料堆的深度不同,物料对抓瓣阻力的大小和方向也在发生变化。与此同时,抓取阻力也与物料特性密切相关,包括粒度、形状、容重、内摩擦角等。本研究所用物料为切削铁屑,其抓取过程比较明显地分为3 个快速阶段和2个慢速阶段。
3.2 基于铰接点坐标的运动状态监测
同样地,在液压杆和抓瓣铰接点周围也粘贴了一圈标志点,并通过圆形拟合计算圆心的方式得到铰点的准确位置。基于铰点坐标所计算出的液压杆长度和抓瓣转角如图12和图13所示。

图12 液压杆长度(基于铰接点坐标)

图13 抓瓣转角(基于铰接点坐标)
通过对比可以看出,基于液压缸伸出量和基于铰接点坐标所计算出的液压杆长度和抓瓣转角表现出较大的一致性,最大相对误差约为0.2%,如图14所示。

图14 基于不同标志点测量的相对误差
4 结语
本研究设计并完成了一种基于摄影测量的多瓣液压抓斗运动监测系统,该系统基于双目视觉测量原理,通过对抓斗上特征点实时位置的测量,实现对抓斗运动轨迹的跟踪和运动状态的在线监测。试验结果显示,针对不同特征点测量所计算出的运动状态参数具有较大的一致性,部分标志点被遮挡时能够保证测量过程不中断,满足复杂工况下的现场应用需求。
