基于车载图像的里程桩牌检测及桩牌号识别
2024-01-18雷雪芹
彭 帝 雷雪芹
(1.陕西交通控股集团有限公司,陕西 西安 710038;2.西安财经大学,陕西 西安 710100)
0 引言
公路交通行业以里程桩作为路线、路段长度或某一地点的参照标准[1],用路况采集车来采集路况数据,由车载GNSS来定位路面病害位置。
光电传感器只能检测车辆行驶里程,无法准确定位车辆位置和方向。付开宇等[2]借助ArcGIS软件对道路里程桩号进行推算,分别确定里程桩牌位置和里程桩牌号,但在构建道路线形时,将每一个转弯位作为新的路段起点,即道路曲线由无数折线构成,不符合实际道路特征,且里程桩间距离计算的投影算法对应用环境要求高。赵祥模等[3]借助GPS 建立起视频图像公路信息管理系统,并将公路里程桩位置的关键视频帧录入该系统,内插得到每一帧在道路中的位置,从而建立路产信息管理系统。由于需手动录入关键帧,该方法不适合大范围应用。马荣贵等[4]提出多传感器信息融合的里程桩定位法,通过视频来采集里程桩位置,并使用光电编码器、陀螺仪来精确定位桩牌位置,但行车图像为非连续的视频,若任意一个公里桩牌号出现错误,全段道路定位错误。田智雁等[5]建立基于公路里程桩的公路数据采集平台,通过现场测量、查阅资料等方式,获取该平台所涉及的公路基础数据,但该方法的工作量大,部门之间的衔接要求高。
已有的方法大多基于车辆里程计、GPS 数据或视频片段进行处理,从而推算出里程桩在道路中所处位置,并未结合连续视频帧。其中,部分研究依赖采集人员的主观行为,自动化程度低,不适合大范围应用。为实现在卫星拒止环境下,利用里程桩牌号来获取路面病害所在位置,本研究构建的路网信息库包含道路编号、公里桩号、百米桩号及GPS 信息。当道路检测车采集路面病害信息后,会及时捕获车载GPS数据,并检索路网信息库,从而确定路面病害在路段中所处位置。
路网信息库构建的关键是里程桩检测和桩牌号识别。车辆在高速道路行驶过程中,静态里程桩识别不符合实际场景定位需求。因此,本研究设计出基于视频图像的桩牌号检测识别系统,设计思路如图1 所示。视频图像中出现拖尾、模糊等现象,可先对视频图像进行预处理。①采用CLAHE 图像增强技术来增强里程桩牌与图像背景的对比度。②采用最大稳定极值区域(Maximally Stable Extremal Region,MSER)来定位桩牌的局部位置,并裁剪桩牌区域。③通过方向梯度直方图(HOG)来提取桩牌所在区域的形状特征。④以HOG提取到的特征集合为支持向量机(SupportVerticalMachine,SVM)输入,实现对两类桩牌图像的分类。

图1 基于车载图像的里程桩定位及桩号识别系统
由于公里桩牌外形独特、字体明晰、破损较少,可采用CRAFT 算法来提取公里桩牌号。而百米桩号目标较小,无法通过颜色特征与背景进行分离。处理方法如下:①由于百米桩牌外形呈圆形,可采用Hough 变换进行圆检测,提取百米桩牌;②为提高车载设备的识别速度,采用基于多尺度梯度算子和局部像素隶属度滤波的模糊C 均值聚类对百米桩桩号进行识别。
对桩牌号识别失败的里程桩牌,结合前后正确识别出的桩号所对应的GPS 信息,用贝塞尔曲线来拟合两桩牌间的道路线形,并使用等距等插值法来确定缺失桩牌的GPS信息。
1 里程桩目标检测
1.1 里程桩视频图像采集
数据采集设备装配模型如图2 所示。摄像机安装在车顶中线前端,使用有源线进行连接。使用度申科技相机进行采样,其最大采样频率为24 FPS,像元尺寸为3.45µm×3.45µm,镜头焦距为3.5µm。车辆在行驶过程中,里程桩在T时刻进入相机视野,T'时刻离开视野。当里程桩离开相机视野时,车辆与里程桩间的距离最短,里程桩牌图像质量较高,即T'时刻为关键视频帧的时间戳。GPS 数据采集设备安装在视频采集设备正下方,该设备的天线具有信号增强功能,能预防多径效应。

图2 数据采集设备视野
1.2 里程桩牌定位
百米桩上层为绿底白字(用于标识百米段数),下层为白底绿字(用于标识百米段所处公里段)。公里桩为绿底白字,上层为公里段编号,下层为高速路编号。
高速公路上非必要不允许停车,无法获取里程桩牌的静态影像,可使用车载视频进行里程桩定位及桩牌号识别。车载设备获取的路牌图像受行车环境、道路环境的影响,导致桩牌角度、尺度发生变化,影响里程桩牌检测效率及桩牌号识别的准确度。为克服外界因素对图像质量影响,可对图像进行预处理。①采用CLAHE 图像增强技术[6],可避免视频图像出现色彩失真、桩牌区域细节丢失及桩牌边缘模糊等问题,提高桩牌检测效率。②使用MSER 来检测不同视角的里程桩。里程桩号字符在整幅图像像素中的占比小,对字符边缘用形态学进行膨胀处理,并计算整个字符区域像素宽度及高度,以该高度和宽度为矩形截取桩牌号。桩牌号检测如图3 所示。由图3 可知,不同角度和尺度的公里桩和百米桩在经过CLAHE 直方图均衡化处理后,增强了里程桩细节信息,抑制了背景噪声,使原本较小的桩牌目标突出。采用形态学MSER 检测对里程桩所在区域进行闭操作,并计算字符区域的宽度和高度。根据字符区域的宽度和高度,对桩牌图像进行裁剪,减少桩牌号识别的图像尺寸、图像像素信息,降低字符聚类网络的计算量,提高桩牌号识别率。
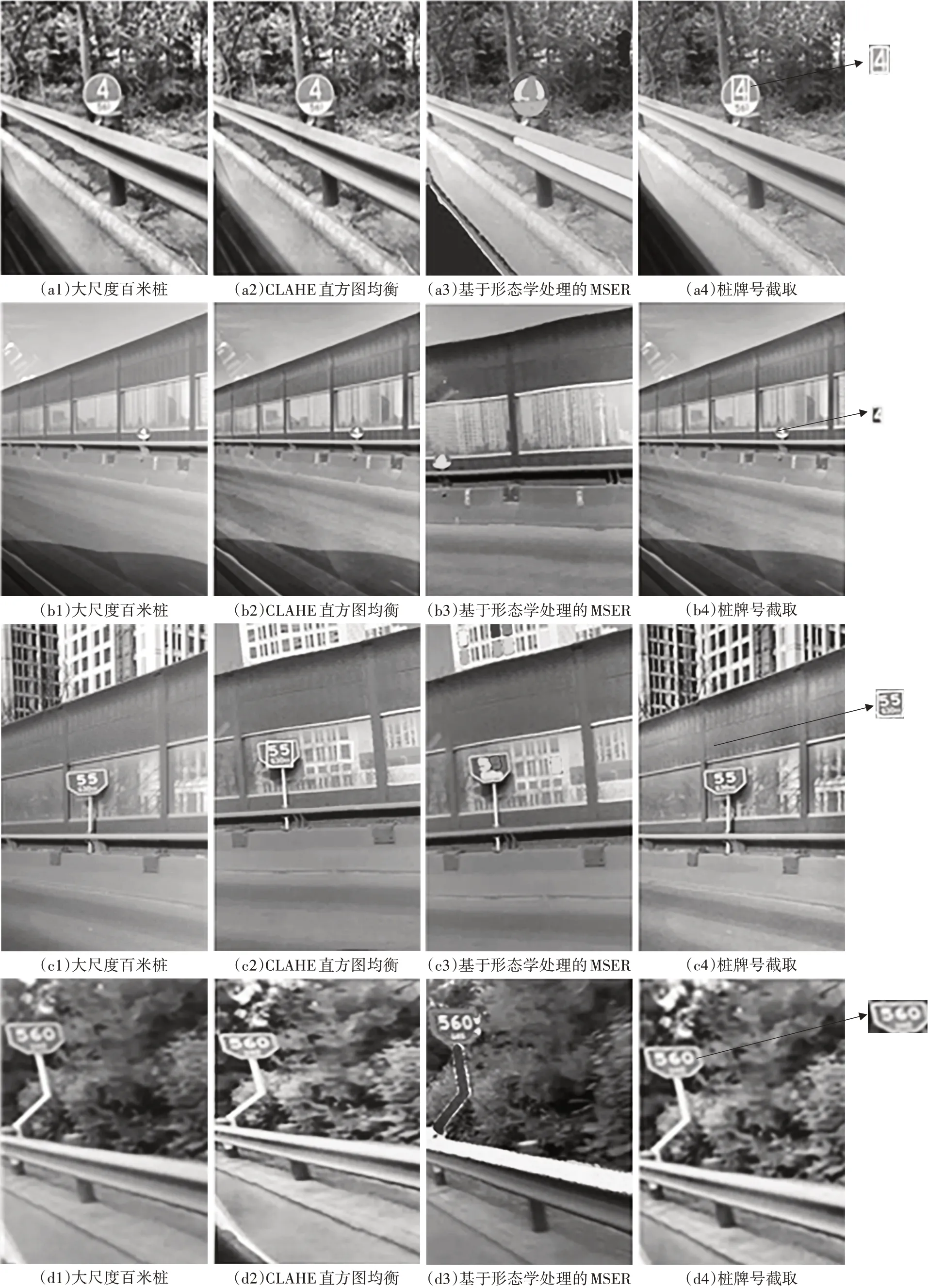
图3 桩牌号检测
1.3 基于“HOG+SVM”的里程桩牌分类
由于采集到的里程桩牌图像成像分辨率不高,且变化尺度较大,难以获得精细纹理信息。方向梯度直方图(Histograms of Oriented Gradients,HOG)对图像边缘及形状的描述能力强,并具有对光照不敏感、平移不变性的特点[7-8];SVM 分类样本维度小、计算量小。因此,本研究使用HOG 的目标特征提取和SVM的目标特征分类对两种桩牌进行分类。
1.3.1 HOG 字符特征提取。HOG 通过计算和统计图像局部区域内的梯度方向直方图来提取特征,其更关注形状信息的分布情况。在具体边缘位置未知时,边缘方向的分布能很好地表示目标轮廓。HOG特征提取如图4所示[9],提取过程如下。

图4 桩牌的HOG特征提取
①通过Gamma 校正来降低图像局部光照变化产生的影响。
②将图像划分为若干单元格,计算每个单元格的梯度方向图。
③将梯度直方图合并为块(Block),并计算每个块的HOG特征。
④将每个块的HOG 特征向量进行归一化处理,降低特征向量受到的干扰。特征向量的归一化函数见式(1)。
式中:ε为极小常数,防止分母为分别为v的L1、L2范数。
⑤生成HOG 特征向量。在图像上以一个方格单元为步长对块进行滑动,将块的特征进行组合,得到图像的HOG特征。
基于上述提取过程,每4 × 4的像素组成一个单元格,1 × 1个单元格组成一块,每个单元格中有9个特征,则每个块中也有9 个特征,将检测窗口步长设置为4个像素,水平方向有3个扫描窗口,垂直方向有7个扫描窗口。此时,60×60的百米桩牌图像共有3 ×7 × 9 = 189个特征。HOG通过图像的像素梯度变化方向来反映桩牌轮廓信息,且对形状、光照不敏感。
1.3.2 SVM 图像分类。SVM 图像分类不仅能减少计算量,还具有更好的分类速度与质量。其中,径向向量机是基于SVM 图像分类效果的关键。本研究选择基于径向基核函数的支持向量机分类算法。HOG 特征数据有部分噪点,易出现分类精度下降的问题,可通过构建边缘像素分类超平面来解决该问题。
①构建SVM分类的目标函数,见式(2)。
式中:w为超平面权重;c为惩罚函数;ξi为松弛变量。
②根据SVM 分类机制,将式(2)转换为凸优化问题,见式(3)。
由 于且ξi≥0,i=1,2,3,…,N,凸优化函数的解即为分类超平面的权重
④SVM分类最优超平面见式(5)。
1.4 基于CRAFT的公里桩牌号检测
CRAFT 字符级文本检测以单个字符为识别单位,再根据字符间的连接关系来确定最终的文本内容。CRAFT 特征提取主干网络为VGG-16、Batchnormalization,解码器采用U-net 方法。CRAFT 特征提取采用自上向下的特征聚合,输出两张特征图,即单字符得分热力图(region score map)和相邻字符连接关系得分热力图(affinity score map),将二者结合,采用连通域分析等图像处理技术[10],得到最终的文本内容。CRAFT文本识别流程如下。
1.4.1 高斯热图生成。自然图像通过高斯热图生成region score 和affinity score。region score 为文字位置信息,affinity score 为文字间的连接关系。文本内部和文本外部的字符中像素点的位置不同,得分也不同。CRAFT 使用连续二维高斯分布对图像进行高斯转换,以减少非字符区域的细节信息,充分利用字符像素的位置得分[11]。将G85及G3002路段的相关公路里程桩牌图像进行二维高斯转换,生成的高斯热力图如图5所示。
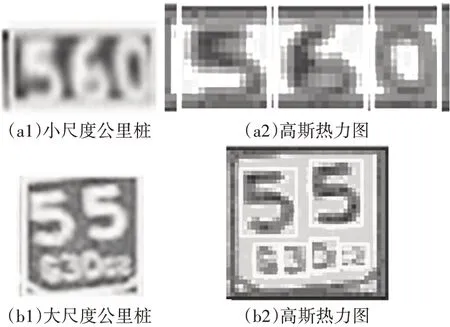
图5 生成的高斯热图
由图5 可知,字符中心与字符边缘的色彩不同,字符中心的得分高、像素信息丰富,字符边缘得分低、像素信息较少。图5(a1)为公里桩牌的小尺度图像,字符像素占整幅图像的像素信息越多,字符中心的得分就越高。图5(b1)为公里桩牌的大尺度图像,其比小尺度图像的像素信息更丰富,里程编号的像素占比多,字符得分高。公路编号所占像素较少,像素得分就较低。
1.4.2 数据标签。每张公里桩牌图像均可生成带字符级边框的region score 和affinity score,再生成ground truth label。字符标间的映射过程如图6所示。由图6 可知,与彩色图像处理相比,灰度化处理能提高字符处理速度。通过高斯热力图的像素特征可获取待检测字符的检测框CharacterBox,切割出待识别的单个字符,并获取给定像素字符中心的概率(region score)。以对角线相连的交点为中心,得到两个字符间的连接点,获取相邻两字符间空白区域中心概率(affinity score)。将建成的affinity box作用在高斯热力图上,即可得到对应图像的高斯热图标签。
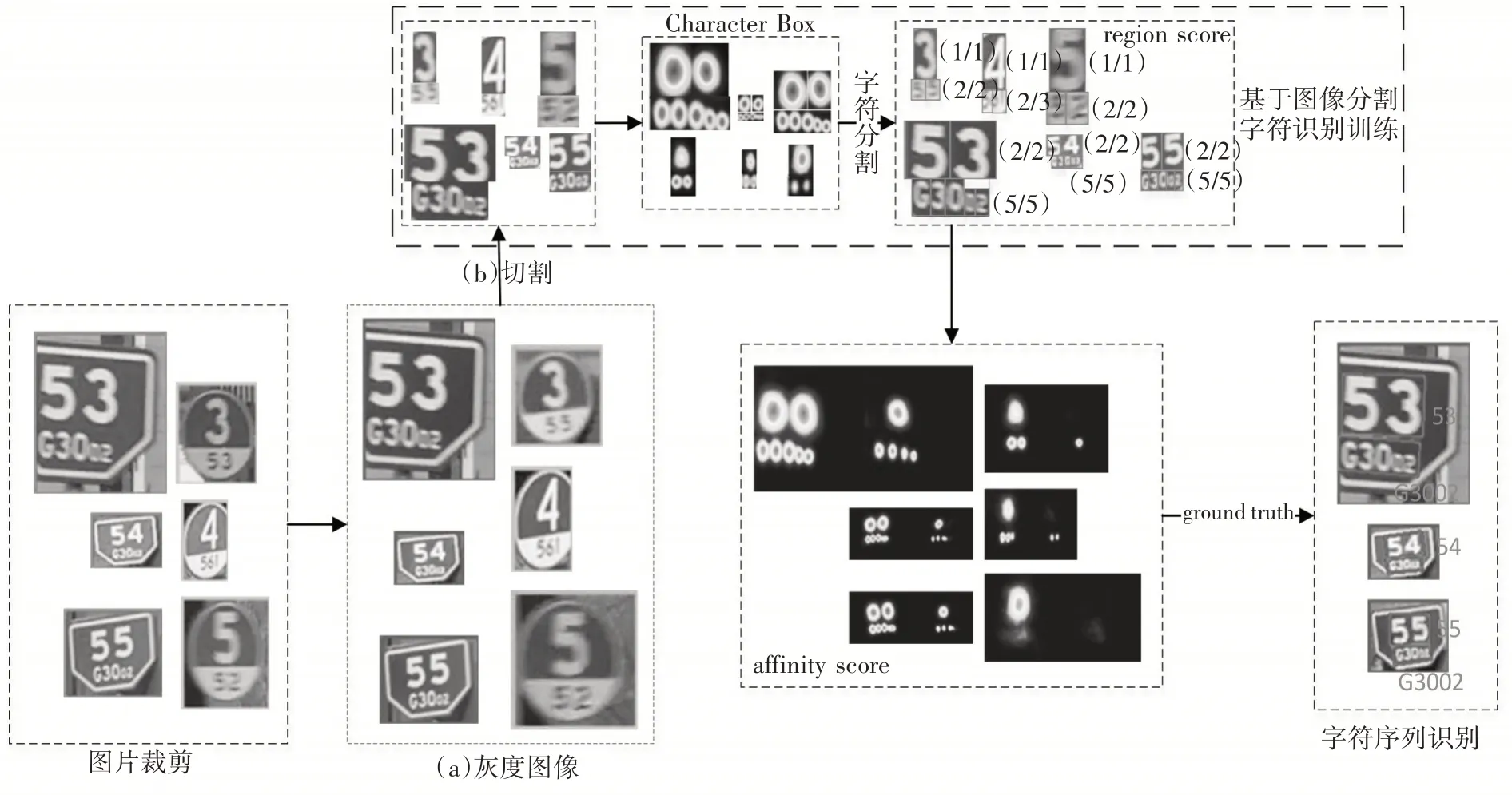
图6 改进CRAFT文本识别网络
采用下述步骤可近似生成region score 和affinity score 的ground truth:准备一个二维各向同性高斯映射;计算高斯图区域和每个字符框间的透视变换;将高斯图映射至字符框区域。训练过程如下:从原始图像中裁剪出字符级图像;采用新region score 来预测每个像素点得分;根据字符像素点得分来判断字符框数量和位置,并为每个字符生成字符标签[5];采用分水岭算法来分割图像框,采用字符边界框来覆盖区域;通过裁剪逆变换将坐标变换为原始图像坐标。
由图6 可知,公里桩牌图像的角度、尺度并不影响CRAFT 识别效果,识别网络的鲁棒性高。视频图像可获取同一桩牌的多张连续图像,从而有效降低识别失败的概率。
1.5 基于字符聚类的百米桩检测
由于百米桩每隔100 m 布设一个,检测量大,桩牌像素占比少,无法直接使用CRAFT 文本识别网络。采用Hough 变换对百米桩进行圆检测,精准定位百米桩所在位置,提高桩牌号的识别效率和准确率[12]。
百米桩牌号识别的关键是对百米段数字的识别,其下方公里段编号在公里桩牌号识别时就被正确识别出。由于百米桩的数量是公路里程桩的10倍,桩牌图像样本数量大,样本中字符区域范围小。基于聚类的字符识别算法的复杂度低、运行速度快,更适合车载设备的部署及快速识别。
模糊C 均值聚类(Fuzzy C-Means,FCM)受图像噪声影响较大,且字符聚类中心到邻域窗口像素距离存在冗余计算,算法复杂度高,对计算设备要求也高,不适合在车载设备上部署。为解决上述问题,本研究提出多尺度梯度算子和像素局部隶属度滤波的FCM 算法,通过形态学重建操作将图像的局部空间像素信息呐入到FCM中[13-14],保持图像细节,以获取精确的目标轮廓信息。将字符聚类中心与邻域像素间的距离计算[15]改为像素区域间的局部像素滤波,不用计算局部空间邻域像素与字符聚类中心像素的距离,能有效降低计算量[16]。
桩牌号区域在百米桩牌图像中的占比小,使用本研究提出的字符聚类识别方法分别识别G3002和G85 路段的百米桩号,结果如图7 所示。Hough 变换圆通过检测界定感兴趣区域,将百米桩牌从背景中分离出来。与传统的梯度算子采用的阈值量化输出边缘斜率相比,多尺度梯度算子通过边缘两侧的像素量化来确定。采用多尺度梯度算子识别,结果见图7(a3)、图7(b3),字符边缘清晰,能很好去除部分局部像素中的‘谷底’,减少噪声影响。基于局部像素滤波FCM 结果见图7(a4)、图7(b4),像素局部滤波能降低系统计算复杂度,字符像素占比越小,计算时间越短。大尺度图像比小尺度图像的像素占比更多,耗时更多。本研究提出的字符识别结果见图7(a5)、图7(b5),均能较好地识别出不同角度和像素占比不同的百米桩牌。
2 百米桩插值矫正
在采集数据过程中,除超车、换道外,车辆沿同一车道驾驶。采集GPS拟合的曲线始终与里程桩牌位置拟合曲线平行,完整的里程桩牌序列能构建出道路曲线线形。在对里程桩牌检测识别过程中,出现桩牌检测或识别失败,会导致桩牌序列出现局部空洞。对缺失的里程桩牌,使用贝塞尔曲线[17],并结合GPS 数据来拟合道路曲线,采用等距离插值算法来插值确定缺失的百米桩的GPS 信息,从而实现对断裂里程桩牌的GPS 列表补充。具体方法如下:判断程桩牌列表序列中首个公里段所缺失百米桩的个数N;采用贝塞尔曲线来拟合该公里段道路曲线线形;确定缺失的百米桩桩号X,并捕获X前后相邻的两个公里桩牌号A、B;在[A,B]中采用贝塞尔曲线来拟合道路线性,以等距离插值方式,循环求出每一缺失百米桩H的GPS 信息。G3002 路段百米桩插值校正见表1。

表1 G3002路段百米桩插值校正
百米桩定位误差取决于两个相邻公里桩的定位误差。同时,要排除公里桩之间出现的多个百米桩人工安装误差d。通过对G3002 路段中K53~K54路段缺失的百米桩进行插值定位,以验证上述方法的有效性。已知K53~K54路段的百米桩牌号9和7识别失败,里程桩号GPS 序列断裂,查阅GPS 信息表,捕获缺失桩牌9和7前后两个桩牌号对应公里桩的GPS 信息,用距离插值法来确定缺失百米桩所对应的GPS。通过贝塞尔曲线[18]来拟合道路曲线,在拟合曲线上等弧长取点,即该公里段内百米桩牌的GPS 信息。插值后的百米桩间距离均值与标准百米桩间距离(100 m)的距离差为插值误差,由表1 可知,误差值为0.087 2 m。
3 试验结果分析
3.1 桩牌图像检测与分类
在G85 公路上共采集到7 769 张路牌图像。其中,公里桩图像1 165张,百米桩图像6 604张。为验证本研究提出的图像分类方法的有效性,对G3002路牌图像进行分类器训练,再将在G85 上采集到的图像送入训练好的“HOG+SVM”图像分类器中进行分类。同时,与决策树分类器、朴素贝叶斯分类器、K近邻分类器及随机森林分类器进行比较。
用准确率(Accuracy)、查全率(Precision)和查准率(Recall)对分类结果进行分析,见式(6)到式(8)。
式中:TP为预测样本为百米桩;TN为预测样本为公里桩;FP为标识样本是百米桩却分类为公里桩;FN为标识样本是公里桩却分类为百米桩。
由式(7)、式(8)可知,FP和FN分别为分类失败的百米桩和公里桩,Precision和Recall的值越大,分类错误的图像数越少,分类正确的图像数越多。分类器的分类效果如图8所示。

图8 分类器的分类效果
伯努利模型对模糊图像、前景背景色彩变化小的图像分类效果较差,出现多张无法识别图像。K近邻分类计算量大,且最为耗时,需计算每个K中心到每一个点的距离,计算量大,不适用于车载设备的部署,但准确率较好。本研究提出的分类方法的分类准确率要优于上述传统机器学习法。
3.2 桩牌号识别
在实现对桩牌分类后,分别调用改进的CRAFT识别网络和改进的FCM 对桩牌号进行识别。采用准确率和错误率对里程桩号检测结果进行评估,见式(9)、式(10)。
式中:d为正确识别的里程牌数;D为路牌总数。
桩牌号识别结果见表2。总里程牌的正确识别率为93.29%,仅有6.71%的总里程牌识别错误。其中,百米桩牌目标较小,受换道、车速等的影响较大,有明显的拖动模糊,其识别准确率为92.99%,而公里桩牌特征明显、字体明晰,其识别正确率为95.02%。整个高速公路编号一致,任意一个公里桩的公路编号都能正确识别出一张桩牌图像,即可完成路网信息数据库中桩牌号的录入。在同一公里段内,百米桩仅需正确识别百米段号即可。

表2 桩牌号识别
3.3 缺失桩牌插值
百米桩目标较小,易出现拒绝识别,导致百米桩序列出现局部缺失。需要对缺失百米桩进行插值校正,结果见表3。表3 中的百米桩3 在路网信息数据库中并无记录。观察视频图像后发现,该路段正在施工,百米桩牌所在区域被完全遮挡,无法正确识别桩牌号。在K554~K555 中,先通过连续GPS 点来拟合该公里段内的道路线形,再采用等距离插值确定该缺失桩牌号的GPS信息,插值误差为0.938 m。

表3 缺失百米桩牌插值校正
4 结论
针对GPS 在复杂路况环境下定位难、与公路里程桩联系不紧密等问题,本研究通过对高速公路上的公里桩和百米桩进行识别,结合GPS信息,构建路网管理信息表,提高了道路定位的精度和效率。经过试验验证,得到以下结论。
①CLAHE图像增强技术对后续采用MSER的里程桩提取及桩牌HOG特征提取发挥着重要作用。采用基于HOG特征提取的SVM 图像分类方法,能有效解决小样本、二分类中的问题,具有极好的性能,实现了对公里桩和百米桩的分类,便于后续操作中能合理调用桩牌号识别算法,提升系统检测效率及精确度。
②采用加入灰度化模块的CRAFT 文本检测来识别公里桩号,能压缩图像存储大小,提高检测速度。采用基于多尺度梯度算子和局部像素隶属度滤波FCM 来识别百米桩,且其检测文件仅有1.4 MB 大小,适用于车载设备的快速部署。本研究提出的针对桩牌特性的桩牌号方法,对桩牌号检测精度达到93.29%。通过桩牌号对应的视频时间戳来调用GPS信息,可定位该桩牌的GPS位置信息,实现路网信息表中的桩牌号及对应GPS信息的录入。
③针对桩牌序列中局部百米桩空洞问题,使用贝塞尔曲线来拟合道路线形,可确认缺失百米桩数目。根据已知公里桩的GPS 信息,采用等距离插值方式求出缺失百米桩的GPS信息。前后相邻两百米桩牌间距平均误差为0.093 8 m,而《公路干线定位准则》对道路前后相邻两里程桩间的定位精度要求为20 cm,即该方法符合定位精度要求。与依赖于GPS加陀螺仪的定位方法相比,本研究提出的方法具有定位速度快、定位精度高、系统设备易于部署等优点。
