智能船舶因系统错误引发的碰撞责任研究
2024-01-16李欣凯
李欣凯
引 言
自党的十八大以来,我国稳步推进“海洋强国”的战略目标,在全球航运市场上正发挥着越来越大的影响力。党的十八大报告提出“提高海洋资源开发能力,发展海洋经济,保护海洋生态环境,坚决维护国家海洋权益,建设海洋强国”;[1]胡锦涛:《坚定不移沿着中国特色社会主义道路前进,为全面建成小康社会而奋斗——在中国共产党第十八次全国代表大会上的报告》,人民出版社2012 年版,第40 页。党的十九大报告再次提出“坚持陆海统筹,加快建设海洋强国”;[2]习近平:《决胜全面建成小康社会 夺取新时代中国特色社会主义伟大胜利——在中国共产党第十九次全国代表大会上的报告》,人民出版社2017 年版,第33 页。党的二十大报告再次强调“发展海洋经济,保护海洋生态环境,加快建设海洋强国”,“维护海洋权益,坚定捍卫国家主权、安全、发展利益”。[3]习近平:《高举中国特色社会主义伟大旗帜 为全面建设社会主义现代化国家而团结奋斗——在中国共产党第二十次全国代表大会上的报告》,人民出版社2022 年版,第53 页。随着科技创新的高质量发展,我国的无人船事业正驶向发展蓬勃期。2017 年,我国在《“一带一路”建设海上合作设想》中倡议“共建智慧创新之路,深化在无人船等领域合作”。[4]刘梦:《国家发展改革委、国家海洋局联合发布〈“一带一路”建设海上合作设想〉》,载中国一带一路网2017 年6 月20 日,https://www.yidaiyilu.gov.cn/p/16670.html。发展无人船有助于实现更可持续的海洋运输业,而当前面临的紧迫任务是为其建构对应的法律框架,包括国际层面的条约协定以及国内层面的法律法规。[5]See Igor Vio & Mate Brdar, Maritime Autonomous Surface Ships—International and National Legal Framework,62 Journal of Maritime & Transportation Science 141, 142 (2022).
在规制无人船方面,学者们的普遍观点如下。其一,存在解释既有规则和创制全新规则两条径路。[6]参见季若望:《智能汽车侵权的类型化研究——以分级比例责任为路径》,载《南京大学学报(哲学·人文科学·社会科学)》2020 年第2 期;See Ling Zhu & Wangwang Xing, Policy-oriented analysis on the navigational rights of unmanned merchant ships, 49 Maritime Policy & Management 447, 457 (2022); Sabrina Hasan, Analysing the definition of “ship” to facilitate Marine Autonomous Surface Ships as ship under the law of the sea, 4 Australian Journal of Maritime & Ocean Affairs 1, 10 (2022).前者意味着逐一审视现有公约的条款内容,并通过缔约国的嗣后协议(subsequent agreement)或嗣后实践(subsequent practice)动态解释现有规则,[7]See Ling Zhu & Wangwang Xing, Policy-oriented analysis on the navigational rights of unmanned merchant ships,49 Maritime Policy & Management 447, 457-459 (2022).为其注入与无人船发展相匹配的新内涵;后者意味着直接起草专门针对无人船的新规范。其二,鉴于公约缔结与修订的复杂性,宜先改革国内法律框架,再改革国际法律框架。[8]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno pomorsko pravo 75, 101 (2020).其三,鉴于当前并未实现船舶驾驶的完全无人化,大多尚处于远程控制和周期性无人(periodically unmanned)驾驶阶段;且前述两种模式对既有规则的冲击相对较小,在短期内对船舶运营商也更具吸引力,宜先调整针对此类模式的法律规范。[9]See Sabrina Hasan, Analysing the definition of “ship” to facilitate Marine Autonomous Surface Ships as ship under the law of the sea, 4 Australian Journal of Maritime & Ocean Affairs 1, 11 (2022); Igor Vio & Mate Brdar, Maritime Autonomous Surface Ships—International and National Legal Framework, 62 Journal of Maritime & Transportation Science 141, 154 (2022); Henrik Ringbom, Regulating Autonomous Ships—Concepts, Challenges and Precedents, 50 Ocean Development & International Law 141, 162 (2019).
与无人机、无人车的发展相比,无人船的研发与规制都处于相对滞后状态。[10]参见刘丹、李瑞:《无人海洋系统与国际法》,海洋出版社2020 年版,第9 页。近几年来,学者开始愈发关注无人船的相关规则适用问题,而大多研究集中在对相关公约和国内法律法规的梳理与解释、无人船法律地位的探讨上。部分学者开始转向对具体领域的探究,如无人船承运人的责任与航行过失免责、海难救助、网络风险保险、海盗行为、船舶碰撞责任等,但大多仅是“蜻蜓点水”式地提到上述问题及其可能的规制方式,而未作全面的深入剖析。在无人船法律地位方面,现有文献大多从条文规定出发,较少关注司法层面的理解与应用。在无人船碰撞责任方面,现有文献大多以损害发生原因作为分类讨论的基点,笼统地阐释归责主体与归责责任;较少关注无人船因系统错误问题引发碰撞损害责任的现象普遍性与规制特殊性,以及无人船本身的“周期性无人”对碰撞责任承担的影响。
有鉴于此,本文拟围绕智能船舶因系统错误引发的碰撞责任展开研究。首先,本文拟在明确界定智能船舶概念的基础上,总体介绍其发展前景;其次,本文拟综合法律文本与司法案例,回应本源性的智能船舶法律属性问题;再次,本文拟主要从主体和客体两个维度着手,重点检视传统规则在因系统错误引发船舶碰撞的责任问题上所面临的挑战;最后,本文拟深入阐释这一具体领域的规则重构及其理念问题,提出本文所主张的区分与并行两大理念。
一、智能船舶的概念界定与发展前景
从罗尔斯罗伊斯(Rolls-Royce)公司研发的世界上第一艘远程遥控商用船“Svitzer Hermod 号”[11]参见罗尔斯罗伊斯:《罗罗展示全球首艘遥控商船》,载微信公众号“罗尔斯罗伊斯”,2017 年6 月27日。到世界上第一艘全自动渡船“Falco 号”[12]参见罗尔斯罗伊斯:《罗罗与Finferries 成功展示全球首艘无人驾驶渡轮》,载微信公众号“罗尔斯罗伊斯”,2018 年12 月10 日。,再到康斯伯格(Kongsberg)公司与雅苒(Yara)公司合作制造的世界上第一艘自动驾驶集装箱船“Yara Birkeland 号”[13]参见薛龙玉:《备受瞩目的Yara Birkeland 号终于来了》,载微信公众号“中国船检”,2020 年12 月8日。;从全球第一艘万吨级智能船舶“大智号”[14]参见江永韬:《世界领先!我国造出了一艘“会思考的船”》,载微信公众号“央视新闻”,2017 年12月6 日。到我国首艘自动驾驶货船“筋斗云0 号”[15]参见邝展婷:《大圣的“筋斗云”来了!我国首艘自主航行货船首航》,载微信公众号“中国船舶报”,2019 年12 月16 日。,再到我国首艘自主航行集装箱船“智飞号”[16]参见中国船级社:《中国首艘、全球最大自主航行集装箱船“智飞”号成功海试》,载微信公众号“中国船级社CCS”,2021 年9 月16 日。,无论是国际层面还是国内层面,智能船舶的发展正如火如荼。技术变革正催生新的法律规范需要。值此背景,下文拟先明确界定本文语境下的“智能船舶”概念,在此基础上阐述智能船舶的引入与发展、优势与风险,以及国际海事组织在规范化上所作的努力。
(一)智能船舶的概念界定
中国船级社在2015 年发布了《智能船舶规范》,并在2020 年作了新修订。该规范第1.1.3 条对智能船舶概念作出了明确的界定。[17]2020 年《智能船舶规范》第1.1.3 条规定:“智能船舶系指利用传感器、通信、物联网、互联网等技术手段,自动感知和获得船舶自身、海洋环境、物流、港口等方面的信息和数据,并基于计算机技术、自动控制技术和大数据处理和分析技术,在船舶航行、管理、维护保养、货物运输等方面实现智能化运行的船舶,以使船舶更加安全、更加环保、更加经济和更加高效。”简言之,智能船舶就是利用并基于各项技术实现智能化运行的船舶。而根据该规范第1.1.2 条,[18]2020 年《智能船舶规范》第1.1.2 条规定:“智能化系指由现代通信与信息技术、计算机网络技术、智能控制技术等汇集而成的针对某个对象的应用,这些应用通常包括但不限于评估、诊断、预测和决策等。智能一般具有如下特点:(1)具有感知能力,即具有能够感知船舶自身和设备、外部世界、获取外部信息的能力;(2)具有记忆和思维能力,即能够存储感知到的外部信息及由思维产生的知识,同时能够利用已有的知识对信息进行分析、计算、比较、判断、联想、决策;(3)有学习能力和自适应能力,即通过与环境的相互作用,不断学习积累知识,使自己能够适应环境变化;(4)具有行为决策能力,即对外界的刺激作出反应,形成决策并传达相应的信息。”智能化呈现出四大特点:具有感知能力、具有记忆和思维能力、有学习能力和自适应能力、具有行为决策能力。由此可见,智能并不要求船舶达到完全不配备船员的程度,智能船舶的核心在于有智能系统支持船舶的各项作业活动,而非船上无人。因此,本文所称的“智能船舶”(intelligent ships)不仅限于“无人船”(unmanned ships),还包括“无人船”的半程发展状态。此外,严格而言,本文所称的“智能船舶”与“自主船舶”(autonomous ships)概念并不完全等同。自主性仅是智能化的其中一方面要求,自主并不一定智能;自主强调在行为方式上自行独立决策,智能则强调各种行为能力的综合。但自主性水平决定着智能化等级,智能船舶也主要依据船舶自主水平划分等级,故下文对这两个术语间的差异暂且忽略不计。且除特别说明之处外,本文统一使用“智能船舶”的表达。
(二)智能船舶的发展前景
与传统意义上的有人船相比,智能船舶在效率、安全、成本、环保、工作环境等方面拥有显著优势。当前正处于5G 和后疫情叠加的时代,持续发展推进智能船舶、逐步提高船舶自主水平直至实现完全的“无人”状态,乃大势所趋。值得注意的是,智能船舶的上述优势存在些许质疑,而其本身也面临对应法律规范匮缺的风险。可喜的是,国际海事组织海上安全委员会在这方面已经有所行动,且初见雏形。
1.智能船舶的优势及其阶梯式发展
2020 年《智能船舶规范》第1.1.3 条对智能船舶的定位是“更加安全、更加环保、更加经济和更加高效”。智能船舶具有不可比拟的优势,主要表现在下述几个方面。其一,提高船舶安全性,据统计以往75%-95%的海上事故系由人为过错导致,利用缜密的科学计算作出最优航行选择并避免人为性海上意外。[19]参见李瑞:《无人船的法律地位研究》,载《中华海洋法学评论》2019 年第4 期,第152 页;王国华、孙誉清:《无人货物运输船的法律冲突及协调》,载《中国航海》2019 年第1 期,第77 页。其二,智能船舶拟依托再生动力,这有利于保护海洋环境。[20]参见王欣、初北平:《研发试验阶段的无人船舶所面临的法律障碍及应对》,载《中国海商法研究》2017年第3 期,第60 页。其三,长期而言可减少船舶运行成本,节省的部分成本包括船员工资、生活支出、人身意外赔偿等。[21]参见李瑞:《无人船的法律地位研究》,载《中华海洋法学评论》2019 年第4 期,第152 页;王国华、孙誉清:《无人货物运输船的法律冲突及协调》,载《中国航海》2019 年第1 期,第77 页。其四,提升航行及运输效率,它无须配置传统船舶上必备的供暖、船员舱室等设施,将原本的这部分空间和能耗全部转化为运输所用。[22]参见王国华、孙誉清:《无人货物运输船的法律冲突及协调》,载《中国航海》2019 年第1 期,第77 页。其五,在后疫情时代,国际海员换班难、在船停留时间过长问题仍持续存在,而智能船舶无须船员在船,一定程度上可以释放这方面的压力。[23]See Igor Vio & Mate Brdar, Maritime Autonomous Surface Ships-International and National Legal Framework,62 Journal of Maritime & Transportation Science 141, 142 (2022).
智能船舶的发展并非一步到位,而是呈现阶梯式特征。国际海事组织海上安全委员会、中国船级社、英国劳氏船级社等分别对船舶自主水平进行了等级划分。其中,中国船级社在2018 年发布的《自主货物运输船舶指南》中直接采用海上安全委员会的四级划分法,而随后在2022 年修订的《智能船舶规范》中则引入五级划分法。
具体的船舶自主水平等级划分如下图一至图三所示。

图一 国际海事组织海上安全委员会对船舶自主水平的四级划分
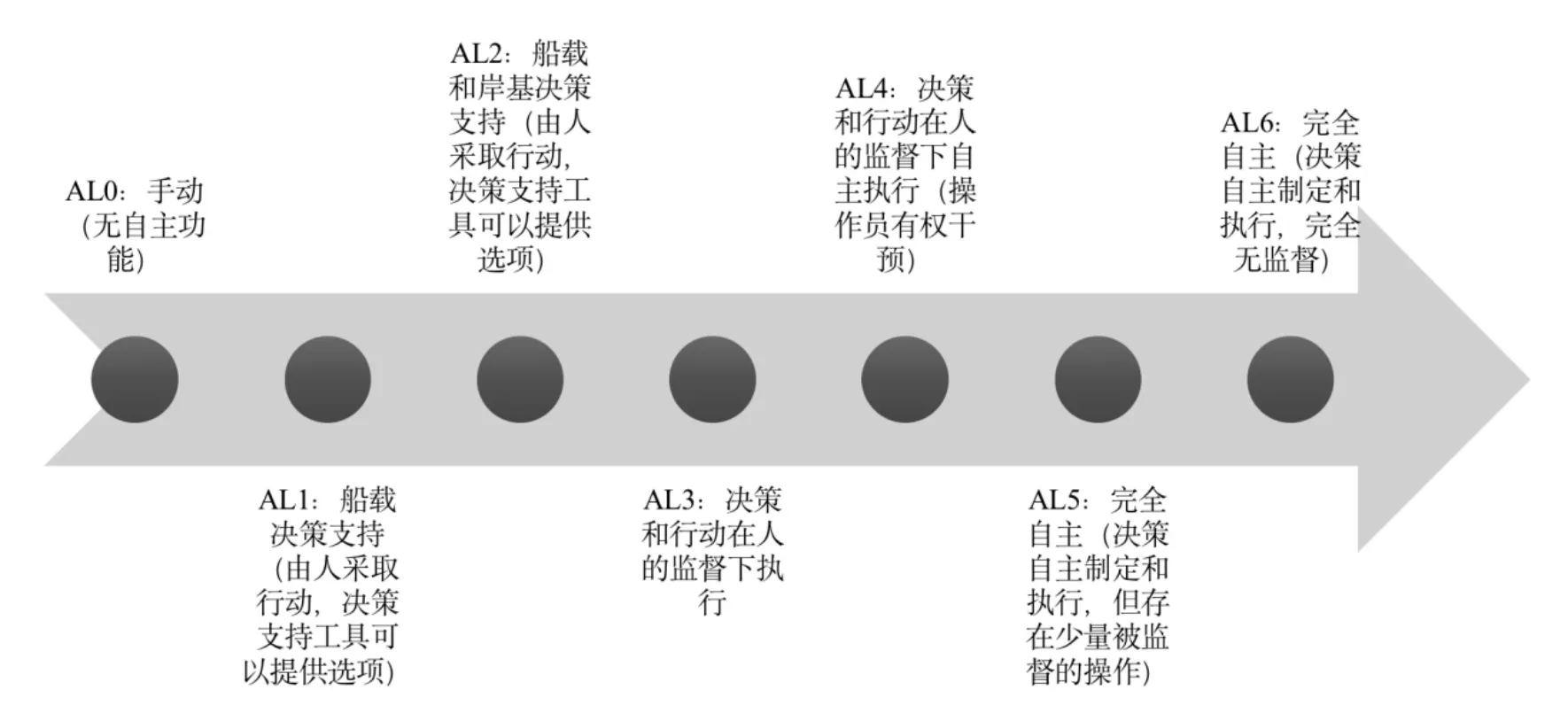
图三 劳氏船级社对船舶自主水平的六级划分
笔者认为,上述对船舶自主水平的等级划分本身无孰优孰劣之分,可谓大同小异,差异更多集中在划分的粗细程度上。船舶自主化的初阶为远程遥控模式,高阶为完全无人模式,而当前我们正处于初阶(或初阶与高阶的过渡形态,即中阶)。这一现实情况也是后文分析其碰撞责任的立论基础。
2.智能船舶的风险及其规范化雏形
值得深思的是,智能船舶是否确实具有上述不可比拟 的优越性。部分航运企业认为,智能系统对运行环境的支持条件要求严苛,条件不满足时数据延迟、丢失的概率较高,这反而会影响船舶的安全和高效运行。[24]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno Pomorsko Pravo 75, 82 (2020).此种科学技术上的不确定性,也会招致智能船舶发生碰撞等严重事故,甚至导致灾难性的石油泄漏、海洋环境恶化。[25]See Ling Zhu & Wangwang Xing, Policy-oriented analysis on the navigational rights of unmanned merc hant ships, 49 Maritime Policy & Management 447, 456 (2022).智能船舶须增加许多远程遥控系统、新型自动化装备,还须新设岸基遥控中心、重新设计运营方案、培训工作人员,由此增加的成本可能会超过其所能降低的成本。[26]参见刘丹、李瑞:《无人海洋系统与国际法》,海洋出版社2020 年版,第9 页。还有学者担心智能船舶的发展会影响海上工作岗位的分配,甚至造成海员的失业。[27]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno Pomorsko Pravo 75, 80 (2020).对此笔者认为,智能船舶是时代孕育的产物,我们必须直面上述风险与挑战,尽可能地通过法律规则体系对智能船舶运作的各环节予以规制,更好激活其潜在巨大优势的一面。
事实上,国际海事组织已经着手并逐步推进规范化智能船舶的进程。在2017 年6 月第98 届国际海事组织海上安全委员会上,海上自主水面船舶(Maritime Autonomous Surface Ships, MASS)被正式列入议程,自此MASS 法规监管范围界定(Regulatory Scoping Exercises, RSE)工作正式启动。经过最近九届会议的不断推进与发展,智能船舶的规范化雏形可体现在《海上自主水面船舶试航暂行指南》(Interim Guidelines for Maritime Autonomous Surface Ships)、MASS 目标型文件(goal-based instrument)中。作为规则制定准备阶段的重要成果,暂行指南强调试航方式应至少提供与相关文书规定同等程度的安全、安保和环境保护;应适当确定与试航有关的风险,并采取措施将风险控制至最低;对参与试航的船上与岸上人员均提出适当资格与经验要求;注重试航系统与基础设施的网络风险管理。[28]IMO, Autonomous shipping, IMO Media Centre, https://www.imo.org/en/MediaCentre/HotTopics/Pages/Aut onomous-shipping.aspx.(retrieved on 10 September 2023).作为规则制定磋商阶段的预期成果,目标型文件旨在规范MASS 的运营,全面解决MASS 船长和船员的作用、责任、能力要求等问题。[29]IMO, Maritime Safety Committee (MSC 105), 20-29 April 2022, IMO Media Centre, https://www.imo.org/en/MediaCentre/MeetingSummaries/Pages/MSC-105th-session.aspx.(retrieved on 10 September 2023).海上安全委员会意图先通过非强制性方式规制智能船舶,而当相应规范具备上升为国际共识乃至习惯的时机和条件时,再赋予这些目标型文件等MASS 准则(MASS Code)以强制性的色彩。其中,智能船舶的碰撞责任承担与分摊问题也是规范化进程中的重要议题之一,后文将对此展开讨论。国际海事组织所作的努力及其历届会议成果雏形,详见附录一表一。
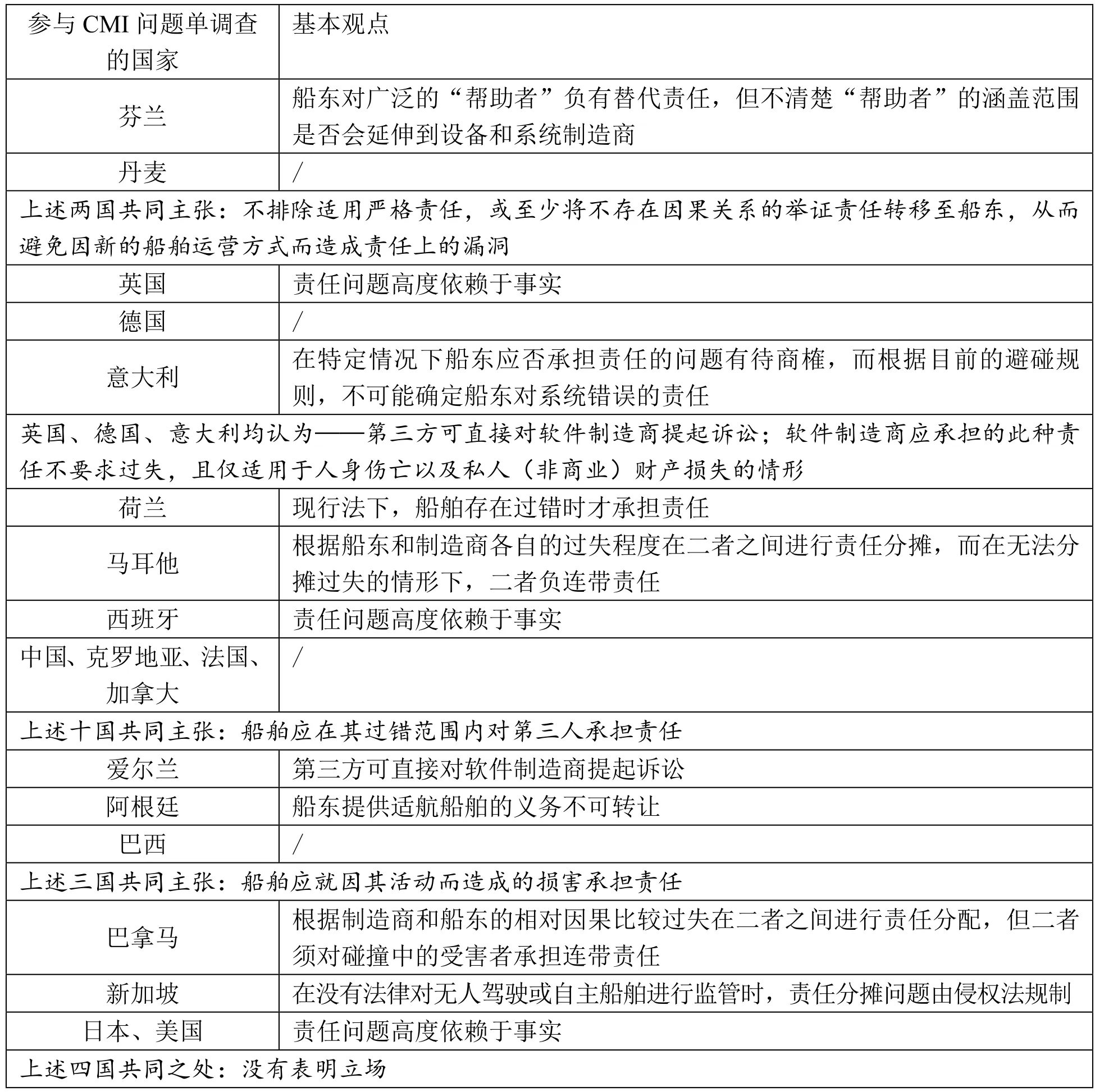
表一 各国对无人船智能系统错误致损中责任分摊问题的回应[60] 表一中的内容系笔者根据国际海事委员会国际工作组(CMI IWG)向海上安全委员会(MSC)第99 届会议提交的附件一(Summary of Responses to the CMI Questionnaire on Unmanned Ships)整理而得,参见国际海事委员会官网(http://www.comitemaritime.org)。
二、智能船舶的法律属性
智能船舶的法律属性系本源性问题。明确智能船舶的法律属性,是对其进行妥善规制的基础。[30]参见孙誉清:《商用无人船法律地位的界定》,载《武大国际法评论》2019 年第6 期,第118 页。在讨论因系统错误引发船舶碰撞的责任规则问题之前,我们必须首先回应两个问题:一是智能船舶能否纳入传统上以“有人船”为建构主体的“船舶”范畴,这关乎船舶碰撞责任及海事赔偿责任限制规则的适用问题;二是智能船舶整体或智能系统部分本身是否可以落入“产品”的范畴,这关乎产品缺陷责任的援引问题。
(一)智能船舶属于船舶
从条文规定层面来看,首先,在联合国(UN)、国际海事组织(IMO)、国际海事委员会(CMI)、国际劳工组织(ILO)的公约框架内,超半数以上的国际海事条约或议定书未规定船舶定义条款。[31]上述组织框架内的相关公约梳理参见孙誉清:《商用无人船法律地位的界定》,载《武大国际法评论》2 019 年第6 期,第120-122 页。而规定船舶定义的条款也不尽相同,即目前在船舶定义上缺乏统一性。但这可能是“因祸得福”,为船舶定义的延伸提供了灵活性可能,使得智能船舶也能被涵盖进去。[32]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno pomorsko pravo 75, 86 (2020).智能船舶意味着船上可能不再配备船员,但这并不会影响其船舶属性的获得,因为现有条约或议定书均未将配备船员作为构成船舶的必备要素。从逻辑而言,若将船舶配员情况作为船舶构成的决定性因素,则会导致逻辑悖论:船员在船上时,该船构成船舶;全体船员下船后,同样的船却不再构成船舶。[33]参见孙誉清:《商用无人船法律地位的界定》,载《武大国际法评论》2019 年第6 期,第134 页。现有条约或议定书也未明确禁止远程履行航运职能,而根据“法无禁止即可为”原则,在没有明文禁止情形下,赋予远程遥控型智能船舶“船舶”的属性具有正当性。[34]See Henrik Ringbom, Regulating Autonomous Ships-Concepts, Challenges and Precedents, 50 Ocean Dev elopment & International Law 141, 160 (2019).
其次,我国《海商法》《海上交通安全法》《船舶和海上设施检验条例》《船舶登记条例》等法律法规在定义船舶时,[35]1992 年《海商法》第3 条规定:“本法所称船舶,是指海船和其他海上移动式装置,但是用于军事的、政府公务的船舶和20 总吨以下的小型船艇除外。前款所称船舶,包括船舶属具。”2021 年《海上交通安全法》第1 17 条第1 款规定:“船舶,是指各类排水或者非排水的船、艇、筏、水上飞行器、潜水器、移动式平台以及其他移动式装置。”2019 年《船舶和海上设施检验条例》第29 条第1 款规定:“船舶,是指各类排水或者非排水船、艇、水上飞机、潜水器和移动式平台。”2014 年《船舶登记条例》第56 条第1 款规定:“‘船舶’系指各类机动、非机动船舶以及其他水上移动装置,但是船舶上装备的救生艇筏和长度小于5 米的艇筏除外。”也均未包含搭载船员的要件。[36]因本文论证重点在于碰撞责任,故对于船舶界定部分的配员问题仅作简单交代而不予赘述。以《海商法》为例,它从可航性、建造规模、目的、区域四个方面加以界定。2018 年11 月的修订征求意见稿作了细微调整,进一步明确了船舶的航行区域要求,[37]2018 年11 月《海商法(修订征求意见稿)》第1.3 条规定:“本法所称船舶,是指海上或者与海相通可航水域的移动式装置。但是,用于军事的、政府公务的船舶以及20 总吨以下的小型船艇除外。前款所称船舶,包括船舶属具。”2020 年1 月的修改送审稿则保留原条文的规制方式,即均未在“无须搭载船员”问题上发生态度转变。最后,2017 年CMI 问题单第1.1 问:“一艘500 总吨以上的无人船是否构成国内法下的船舶?”[38]2017 年3 月,CMI 无人船工作组向其成员发放一份问题单。该问题单共计18 题,旨在了解各国对部分国际规则和原则的理解和应用在多大程度上将会或可以适用于无人操作。问题涵盖无人船中船舶、船长、船员的认定,船舶登记,《联合国海洋法公约》《国际海上人命安全公约》《国际海上避碰规则公约》《海员培训、发证和值班公约》的适用、法律责任等。截至2018 年2 月13 日,工作组已收到19 个国家的答复。巴拿马指出无人船是否构成船舶须交由国内行政部门决定,克罗地亚则表示无人船不具有适航性,因而在国内法项下难以构成船舶。而参与问卷调查的19 个国家中有17 个对此持肯定立场。
从司法实践层面来看,域外法院对船舶认定的标准各异。例如,在“Slops 号”案中,针对最初被设计和建造为运载石油货物的油轮,后被改装为接收和处理油性废物的浮动设施,希腊上诉法院以“其一直停泊在固定点,只作为专门用于接收和处理废油的单位,不具有运输能力”为由认定“Slops 号”不属于船舶;希腊最高法院嗣后推翻了上诉法院的判决,将“Slops 号”定位为移动式平台,进而属于船舶的范畴。[39]See Slops v.International Oil Pollution Compensation Fund 1992, Greek Supreme Court 23 (2006).又如,在Guardian Offshore AU Pty Ltd v.Saab Seaeye Leopard 1702 Remote Operated Vehicle 案中,澳大利益联邦法院基于船舶定义的三要素否定涉案“Seaeye”远程操作水上交通工具的船舶属性。该法院指出,船舶定义的三要素即船舶应具备的惯常属性(usual attributes, customary attributes)包括:第一,船只(vessel);第二,用于水上航行;第三,在水中移动。[40]See Guardian Offshore AU Pty Ltd v.Saab Seaeye Leopard 1702 Remotely Operated Vehicle Lately on Board the Ship “Offshore Guardian” and Another, FCA 273 (2020).但正如上述“Seaeye”案中批评者所主张的那样,目前尽管存在所谓的船舶定义“惯常属性”测试,但“惯常属性”的数量事实上还是不明的。再者,笔者认为,第一层的船只测试可能反而会将船舶界定问题复杂化,形成船舶与船只自我循环论证的逻辑怪象。质言之,在智能船舶是否属于船舶的问题上,域外法院认为其仍是一个印象问题(a matter of impression)。域外涉船舶界定的其他典型案例,详见附录二表二。

表二 智能船舶因系统错误引发的碰撞责任规则体系
鉴于国际海事组织自2017 年起推进智能船舶的监管规范化工作,故笔者拟以2018-2022 年(合计5 年的时间跨度)为研究时间段,分析比较我国法院在船舶界定上的主要观点。近五年来,我国尚不存在正面回应智能船舶是否属于船舶的现实案例,且大部分案件没有充分论证乃至几乎没有论证船舶界定的理由,但我们仍可以从中或多或少地窥见法院在认定船舶时重点考虑的主要因素。例如,在上海港国际客运中心开发有限公司与星客特(上海)汽车服务有限公司仲裁程序中的财产保全案中,上海海事法院认定涉案未登记的游艇属于船舶,因为它的用途是在海上、通海水域航行,而未办理船舶登记并不会影响其船舶属性。[41]参见上海海事法院民事裁定书,(2019)沪72 财保293 号。又如,在珠海横琴新区佳鑫源发展有限公司、吴云租赁合同纠纷案中,广东省珠海市中级人民法院以“涉案浮船的功能是浮动码头,而非为了航运作业在海上行驶”为由,认定涉案浮船不属于船舶。[42]参见广州海事法院民事裁定书,(2018)粤72 民初1738 号。从涉船舶定义案例归纳可得,要构成我国法律意义上的船舶须具有可移动性、可航性,其目的和功能是为了航运作业,且登记与否不影响其船舶属性的获得。智能船舶显然可以满足上述要件,从这个意义上说,智能船舶属于船舶具有一定的实践支撑。我国2018-2022 年期间涉船舶界定的案例,详见附录三表三。
综上,智能船舶至少在形式意义上、应然意义上属于船舶。但由于现行规则难以与智能船舶的特性相契合,故目前其尚不具有实质意义上、实然意义上的船舶地位,[43]参见孙誉清:《商用无人船法律地位的界定》,载《武大国际法评论》2019 年第6 期,第136 页;王国华、孙誉清:《无人货物运输船的法律冲突及协调》,载《中国航海》2019 年第1 期,第78 页。这也正是规则调整的方向所在。
(二)智能船舶属于产品
在回答智能船舶是否属于产品的问题之前,须先回答智能船舶是否属于物的问题,而这需要回归船舶以及人工智能的法律地位问题。相关概念之间的层次关系如下图四所示。
在人工智能的法律地位上,学界历来存在争议,大体有“客体说”“主体说”以及“电子人说”。[44]参见张志坚、项波:《科技与法律的碰撞:无人驾驶汽车法律规制研究》,知识产权出版社2021 年版,第35-59 页;杨梦露:《无人驾驶事故责任研究》,九州出版社2021 年版,第7-9 页。“电子人说”是学者在研究无人车时新近提出的主张,以应对无人车事故中的侵权责任问题。在该主张项下,无人车硬件本身可形成一定的空间,其可视为法人的经营场所,硬件所有权人、软件所有权人以及数据所有权人为电子法人之法定股东;三者共同出资的财产,为无人车独立的财产;在发生侵权行为时,三者以其出资为限承担有限责任,无人车则以该笔独立财产对外承担责任。[45]参见张志坚、项波:《科技与法律的碰撞:无人驾驶汽车法律规制研究》,知识产权出版社2021 年版,第35-59 页;张志坚、曾晓梅:《无人驾驶汽车电子化运营:优势、法律风险与规制》,载《行政管理改革》2022年第1 期,第73 页。对此笔者认为,该主张具有一定的合理性,但鉴于目前人工智能尤其是智能船舶的发展现状,此种拟制界定未免存在超前之虞。再者,现阶段的人工智能尚不具有完全性自主意志,故当今及未来一段时间仍宜因循传统路径,将其作为法律上的客体。[46]参见王利明:《人工智能时代对民法学的新挑战》,载《东方法学》2018 年第3 期,第5 页;杨梦露:《无人驾驶事故责任研究》,九州出版社2021 年版,第101-103 页。更进一步而言,虽然人工智能的硬件、软件、数据复合体形式给传统意义上的“一物一权”原则带来极大冲击,[47]参见张志坚、项波:《科技与法律的碰撞:无人驾驶汽车法律规制研究》,知识产权出版社2021 年版,第10-17 页。但这不能根本上否定人工智能当前仍存在“近物性”的一面。而在船舶的法律地位上,诚然,船舶具有人格化的性质。但我国目前仅将船舶相关人员作为责任主体,而非船舶本身,《海商法》的修订过程似乎也释放了上述信号。[48]1992 年《海商法》第168 条规定:“船舶发生碰撞,是由于一船的过失造成的,由有过失的船舶负赔偿责任。”2018 年11 月《海商法(修订征求意见稿)》第9.4 条和2020 年1 月《海商法(修改送审稿)》第197 条规定:“船舶发生碰撞,是由于一方的过失造成的,由有过失的一方负赔偿责任。”由此可见,上述条文并未进行实质修改,但似乎隐含否认船舶主体地位的意思,更强调人的过错责任,而非物的责任。
智能船舶属于物,下一步所要回答的问题是——智能船舶是否属于产品,以及仅仅只有智能系统部分本身就属于产品,还是包括系统在内的智能船舶整体才属于产品?对此笔者认为,智能船舶属于产品,且从部分和整体两个维度均可将其归入产品的范畴,理由如下。其一,智能船舶上搭载的系统本身亦属于复合体,是设备、软件、更新维护服务的综合,是无形与有形的统一体。[49]参见范晓波、陈怡洁:《船舶无人化趋势下AI 航行系统的责任探析》,载《中国海商法研究》2021 年第4 期,第40 页。其二,系统部分本身与智能船舶整体具有可分性,现实中亦存在系统提供来源于单独厂商的情形,承认部分与整体共同的产品属性,也是为责任承担扫清障碍。其三,《产品质量法》要求产品须经过加工、制作,用于销售,不属于建设工程,[50]《产品质量法》第2 条第2 款规定:“本法所称产品是指经过加工、制作,用于销售的产品。”第3 款规定:“建设工程不适用本法规定;但是,建设工程使用的建筑材料、建筑构配件和设备,属于前款规定的产品范围的,适用本法规定。”智能船舶显然满足上述要件。其四,从国际上来看,联合国教科文组织通过的《关于机器人伦理的初步草案报告》及欧洲议会表决通过的《欧洲机器人技术民事法律规则》主张人工智能设备应当适用产品责任。[51]UNESCO, Report of COMEST on Robotics Ethics, UNESCO Programme and Meeting Document (14 September 2017), https://unesdoc.unesco.org/ark:/48223/pf0000253952; Mady Delvaux, Georg Mayer & Michał Boni, Report with Recommendations to the Commission on Civil Law Rules on Robotics (2015/2103(INL)), European Parliament Report (27 January 2017), https://www.europarl.europa.eu/doceo/document/A-8-2017-0005_EN.html.亦即,将智能船舶归属于产品与国际观点和趋势相契合。综上,智能船舶及其系统均属于产品的范畴。
三、因系统错误引发船舶碰撞的责任规则检视
传统意义上,若船舶发生碰撞事故,则很可能是人为因素所致,即可归因于船长、船员、船舶所有人、经营人、管理人的过失。根据过错责任原则与雇主替代责任理论,直接追究船舶所有人等的船舶碰撞损害赔偿责任即可。而在智能航运时代,航行更多依赖于系统的自我计算,若发生航海事故,则更可能是智能船舶因自身系统错误而导致的。[52]参见韩立新、夏文豪:《中国无人船的政策与法律规则应对》,载《海洋法律与政策》2021 年第1 期,第56 页。诚然,第三人原因等亦会造成智能船舶的碰撞事故。但与有人船相比,其最大的不同在于系统错误而引发的损害及其责任,这就使碰撞责任问题趋于复杂化与多元化。故下文拟将致损原因限定在“因系统错误而引发的”这一类型上。
传统上,船舶碰撞损害赔偿责任须满足下述要件:第一,船舶符合我国《海商法》的要求;第二,碰撞发生在船舶之间;第三,船舶之间有接触;第四,存在损害后果;第五,碰撞发生在海上或与海相通的可航水域。针对第一个要件,前文已论证,智能船舶可以划入我国《海商法》的船舶范畴。针对其余四个要件,因本文探讨的是智能船舶因系统错误引发碰撞的责任配置问题,主要处理的是外部结构层面不同主体可能的责任构成与承担依据问题,故后文拟假定上述四个要件均已满足,并在该大前提下探讨具体的责任体系问题。
在责任承担与分摊方面,现有规定均未作出正面回应,而可能的规制径路有:一是船舶所有人、经营人、管理人等的船舶碰撞损害赔偿责任,在非故意情形下还可依法定程序向法院申请海事赔偿责任限制;二是系统提供商、智能船舶制造商等的产品缺陷责任。这两种规制径路的关系如何,在实际应用时可能会面临哪些挑战,这是下文拟检视的要点。
(一)新主体的出现与传统主体的角色转变
与智能船舶研发制造及运营作业相关的人员可能有:智能系统提供商、远程运营商、船厂、销售者、船舶所有人、承运人。其中,前两个为新主体,后四个为传统主体,但其作用已俨然发生转变。而随着新型航运科技公司的出现,智能系统提供商与船厂的角色和职责将合二为一。[53]参见范晓波、陈怡洁:《船舶无人化趋势下AI 航行系统的责任探析》,载《中国海商法研究》2021 年第4 期,第42 页。
值得探讨的是,在半自主即远程遥控阶段的智能船舶作业时,其对岸基操控人员的素质要求如何?与传统意义上的船员相比,其须具备更高的素质还是在素质门槛上有所放宽?这关乎人机关系及后续的责任承担与分摊问题。有的学者主张岸基操控人员也必须具备一定的素质,与合格的船员素质相当,甚至是更高水平;除了航海知识,他们还应该拥有信息技术和最先进系统方面的知识储备。[54]See Michael Boviatsis & George Vlachos, Sustainable Operation of Unmanned Ships under Current International Maritime Law, 14 Sustainability 1, 6 (2022).有的学者则主张传统船长、船员的职责与岸基操控人员未来可能承担的职责截然不同,且不太可能要求后者具备航海技术、导航、通信和海洋工程方面的资质才能在岸基控制中心操控船舶。[55]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno Pomorsko Pravo 75, 88 (2020).笔者更支持前者的观点,技术的进步与人的主观能动性发挥之间并无此消彼长的关系,技术发展并不当然意味着可以对人的素质要求门槛有所放宽,否则会形成主体责任向系统责任逃逸的怪象。
再者,智能系统提供商是否需要为系统违背伦理道德的决策买单?亦即,在判断系统是否存在决策过错时,须进行纯粹的技术判断,还是道德与技术的综合判断?有的学者认为系统本身包含其研发者的个人伦理倾向与选择,如在遇到类似的“电车难题”时,系统的计算结果与反应实际上代表的是研发者的意志;一旦系统作出违背伦理道德的决策,须及时追究背后人员的相应责任。[56]参见杨梦露:《无人驾驶事故责任研究》,九州出版社2021 年版,第105-106 页。有的学者则认为智能系统存在发展后期深度学习的问题,而这是研发者在设计当时所无法预见的,我们也无法苛求系统自身作出理性的道德评判,故应采剔除道德因素的纯粹技术性判断。[57]参见季若望:《智能汽车侵权的类型化研究——以分级比例责任为路径》,载《南京大学学报(哲学·人文科学·社会科学)》2020 年第2 期,第127-128 页。笔者更支持后者的观点,系统在研发出来之后,就具有相对独立性,并非研发者个人意志的附体。在此种情形下,若经证实不具有期待可能性与预见可能性,则系统提供商原则上无须为此买单。此系社会整体须承受的技术风险,但亦不排除上述主体在公平责任范围内适当分摊一定的损害赔偿责任。质言之,新主体的出现与传统主体的角色转变,使得各方之间的既有法律关系趋于紧张化,[58]See Henrik Ringbom, Regulating Autonomous Ships-Concepts, Challenges and Precedents, 50 Ocean Development & International Law 141, 147 (2019).传统义务与责任理论难以有效应对。
(二)船舶碰撞责任与产品缺陷责任的交织
在智能船舶作业模式下,船员等传统主体向智能系统让渡全部或部分的航行控制与决策权,系统基于这部分职责的履行会衍生相应的义务与责任,最终结果可能是发生碰撞事故后系统提供商、生产者等亦会被纳入责任主体范畴。事实上,国际海事委员会也特别关注产品缺陷责任在智能船舶领域的引入与作用可能。2017 年CMI 问题单第6.1 问“假设一艘船系自主航行,即依托一个完全计算机化的导航/防撞系统,而该系统发生故障,并且该故障是造成碰撞损失的唯一原因;此时根据各国国内法,船东和自主系统的制造商之间应如何分配责任?”在参与问卷调查的19 个国家中,大多数国家采用以过错为基础的碰撞责任,有些国家还补充可以根据产品责任规则追究制造商的责任,但这主要适用于人身伤害。[59]该问注释特别指出,该问题没有包含足够的信息,海商法协会无法(以统一的方式)进一步阐述有关替代责任或举证责任规则等方面的国内法,这些规则在特定情况下可能使船舶所有人承担责任,也可能使其不承担责任。答复信息仅限于涉及船舶所有人对外部第三方责任的信息,而不包括与制造商有关的内部责任。各国的回答详见下表一。
由此可见,各国普遍认可船东和自主系统之间的责任分摊,分摊基准系相对因果关系与比较过失。亦即,二者对内承担的是按份责任,对外若造成人身伤亡则须承担连带责任,之后是内部的按过失比例追偿问题。如此,船舶碰撞责任就与产品缺陷责任相互交织在一起,随之而来的问题是系统提供商能否进一步享有海事赔偿责任限制的抗辩权优待?特别是对于新型航运科技公司而言,其兼具船舶所有人与智能系统生产者的双重角色,这一性质是否会影响其海事赔偿责任限制的取得与应用?
此时须区分产品责任的子类型,若属于产品瑕疵责任,受害者对系统生产者提起一般侵权之诉,则理论上基于海事赔偿责任限制的创制初衷与主体扩大化趋向,系统生产者可以享受海事赔偿责任限制的抗辩权优待;若属于产品缺陷责任,则系统生产者仍无法享受此种优待。[61]参见范晓波、陈怡洁:《船舶无人化趋势下AI 航行系统的责任探析》,载《中国海商法研究》2021 年第4 期,第49-50 页。新型航运科技公司内部具有相对独立性与可分性,不同角色可对应不同的责任规则。否定产品缺陷项下系统生产者可进而行使海事赔偿责任限制的抗辩权,与产品缺陷严格责任原则以及全面保护与救济理念一脉相承。质言之,两类责任的相互交织状态给处理智能船舶碰撞责任规则问题带来新的挑战,在重构相应规则体系时更应精细作业、分类讨论、抽丝剥茧。
还需要指出的是,按照传统理论以及《海商法》《民法典》《产品质量法》等规范群的规定,船舶碰撞责任遵循过错责任的归责原则,而产品缺陷责任遵循无过错责任的归责原则。上述两类责任的相互交织,也引发了学者们的进一步深思:是否有必要改变船舶碰撞过错责任的传统思维,全面引进《民法典》“产品责任”一章与《产品质量法》中的无过错责任构造体系?更为上位的讨论乃关乎整个《海商法》的存废问题,智能船舶时代的到来及其迅速发展,是否会导致《海商法》的全盘颠覆甚至于消失?对此,笔者认为没有必要将船舶碰撞责任革新为一种无过错责任,《海商法》也不会因智能船舶的发展演进而消失;[62]参见曲亚囡、申傲:《海商法视角下对CMI 无人船调查问卷的思考》,载《海洋开发与管理》2021 年第4 期,第31-32 页。相反,它可以在完善相应规则、提高与智能船舶特性适配性的基础上焕发更为强大的生机与活力,为智能船舶事业的稳步健康发展提供规范性支撑力量。后文拟详述这两类责任之间的并行关系。
四、因系统错误引发船舶碰撞的责任规则重构
基于前文所述的问题复杂性与传统规则应用时的失灵,当前亟须重构相应的规则体系,以填补法律空白。下文拟基于控制变量的基本思路,探索规则重构中所须坚持的理念问题。船舶碰撞事故发生的原因可能有多种,本文择其一“因智能系统错误引发的船舶碰撞”加以讨论,此即定量。船舶碰撞情形、船舶自主水平、自主应用阶段、系统错误期间,以及潜在责任主体与对应归责原则,此即变量。下文拟聚焦上述变量,分类讨论每一变量项下可能的规制方式。
(一)规则重构中的区分理念
智能船舶的出现并不意味着传统有人船完全退出航运作业的舞台,至少会存在一个过渡期间。而就目前的研制现状来看,此过渡期间预计会持续较长一段时间。因此,今后智能船舶发生碰撞并不单指智能船舶之间发生碰撞,还会存在智能船舶与有人船之间的碰撞,而此时的归责模式理论上也应有所区分。前已述及,智能船舶的发展并非一步到位,其系由低阶向高阶逐步进化的动态发展过程。因此,不同自主水平的智能船舶,其系统的控制和决定影响亦不同,这也就要求在责任分摊上有所区别对待。同时,在一个航次周期,受作业航区的外在条件影响,智能船舶的自主能力发挥也会有所不同,这进而也会影响最终的责任承担。而就系统本身而言,它在航行前、航行中等阶段均存在发生错误的可能,这也须成为责任分配时的考虑因素之一。此即区分理念。
1.区分船舶碰撞情形
今后及未来较长一段时间,智能船舶碰撞存在下述两类情形:一是智能船舶之间的碰撞,二是智能船舶与传统有人船之间的碰撞。[63]基于前述假定,本文暂不予考虑船舶与码头、灯塔、灯船、防波堤或其他固定建筑物之间的碰撞情形,仅考虑船舶与船舶之间的碰撞情形,并在此项下区分智能船舶与传统有人船的碰撞情形组合。亦即,本文假定文中的“船舶碰撞”是受《海商法》第八章所调整的船舶碰撞情形。在前一种情形下,对于第三方的损失,智能船舶双方均须根据严格责任归责原则对外承担连带责任;而对于双方船舶之间的损失,双方可根据过错比例对内按份追偿。在后一种情形下,智能船舶须依据严格责任归责原则承担责任,有人船则依据过错原则承担责任,双方对第三人的损失尤其是人身伤亡承担连带责任。[64]参见韩立新、夏文豪:《中国无人船的政策与法律规则应对》,载《海洋法律与政策》2021 年第1 期,第56 页。
严格责任的正当性基础在于行为人对危险源的开启与扩大、对危险控制的更为可期待性、所得利益的对价报偿。在智能船舶与有人船发生碰撞的情形下,基于技术的黑匣子效应,智能船舶可以被视为危险源的开启或扩大一方,故对其适用严格责任原则。而前已述及,在我国船舶本身并非责任主体,不能独立履行义务、承担责任。在智能船舶模式下,责任主体可能有智能系统提供商、远程运营商、船厂、销售者、船舶所有人、承运人。加入生产者等责任主体并不意味着豁免船舶所有人、承运人的船舶碰撞责任,而是敦促相关主体恪尽职守,尽可能规避技术“黑匣子”不可逆转性危害,在推进技术发展与保护受害者之间寻求一个最佳平衡点。笔者认为,对智能船舶适用严格责任原则更多地是从责任体系层面讨论的,指向的是智能船舶所有人等的船舶碰撞责任与智能系统生产者的产品缺陷责任,即并不意味着全盘革新船舶碰撞传统的过错责任认定逻辑。质言之,这也就要求合理分配智能船舶生产者(包括智能系统提供商等)与智能船舶所有人(包括船舶经营人等)之间的责任。[65]参见曲亚囡、申傲:《海商法视角下对CMI 无人船调查问卷的思考》,载《海洋开发与管理》2021 年第4 期,第32 页。
2.区分船舶自主水平
前已述及,船舶自主水平存在等级划分,从三级到六级不等。事实上,船舶的自主水平大体上均可归纳为三类:一是“受监督的自主”(monitored autonomy),这指的是智能系统可以相对独立操作船舶的情况,但船员持续监督系统的自动化状态,在系统未能令人满意地执行作业任务时,船员被期望且有义务立即进行干预。亦即,此时智能系统为船员提供决策支持,但基本上不会改变船员的角色或责任。二是“限制性自主”(constrained autonomy),这指的是智能系统独立操作船舶,不需要人的监督,但当系统要求提供协助时,船员必须随时准备接管作业职责。三是“完全自主”(fully autonomy),这意味着智能系统的运行完全没有人的参与,船员不需要随时待命。[66]See Henrik Ringbom, Regulating Autonomous Ships-Concepts, Challenges and Precedents, 50 Ocean Development & International Law 141, 146 (2019).在“完全自主”模式下,须特别关注冗余功能和操作(redundancy functions and operation),为通信丢失或延迟的辅助风险提供解决方案,[67]See Henrik Ringbom, Regulating Autonomous Ships-Concepts, Challenges and Precedents, 50 Ocean Development & International Law 141, 145, 156 (2019).否则会触发相应的责任。
学者普遍认为当智能船舶处于“受监督的自主”阶段时,仍应以传统上人的过错责任为基础,追究船舶所有人的自己责任或替代责任。因为在此初级阶段,智能系统尚不具备真正意义上的独立性。此时若存在远程控制,则岸基控制中心基于其对船舶的管理、控制与决策行为过错须承担相应责任,而船舶所有人亦须因其挑选、监督职责而承担相应责任。当智能船舶处于“完全自主”的高级阶段时,智能系统真正获得了独立性,故应以系统提供商或生产者的产品责任为基础。[68]See Michael Boviatsis & George Vlachos, Sustainable Operation of Unmanned Ships under Current International Maritime Law, 14 Sustainability 1, 14 (2022).参见季若望:《智能汽车侵权的类型化研究——以分级比例责任为路径》,载《南京大学学报(哲学·人文科学·社会科学)》2020 年第2 期,第120 页。需要指出的是,虽然该文的研究对象是智能汽车,但鉴于智能汽车与智能船舶在系统等方面具有可类比性,故在探讨智能船舶碰撞的责任架构时可参考智能汽车领域的相关意见,后者的研究成果也相对更为成熟而丰富。
尚存争议的是,在中间“限制性”自主阶段,是仅由船舶所有人、岸基控制中心承担责任,还是须加入系统生产者?亦即,产品责任是否仅存在于最高一级自主水平的智能船舶中?在其他级别的智能船舶中是否也存在产品责任?对此,有的学者持肯定意见,主张中间阶段也须纳入生产者的产品责任;[69]参见季若望:《智能汽车侵权的类型化研究——以分级比例责任为路径》,载《南京大学学报(哲学·人文科学·社会科学)》2020 年第2 期,第129 页。有的学者则持反对意见,主张此时仍应以船舶所有人、岸基控制中心等操作或监督操作者的船舶碰撞责任为主,而生产者的产品缺陷责任可忽略不计。[70]See Michael Boviatsis & George Vlachos, Sustainable Operation of Unmanned Ships under Current International Maritime Law, 14 Sustainability 1, 14 (2022).笔者认为,中间阶段亦须考虑系统生产者的责任。因为此阶段人的控制和决定力已经大大削弱,系统的作用和影响更居主导地位,生产者须相对应地提高自身注意义务,否则就应承担赔偿责任等不利后果。
3.区分自主应用阶段
智能船舶的自主应用阶段就涉及“周期性无人”(periodically unmanned)以及自主与非自主相互切换的问题。在单个航次中,智能船舶的自主水平可能有所不同,因为它可能根据航行区域(sailing area)、交通状况(traffic conditions)等而改变。[71]See Henrik Ringbom, Regulating Autonomous Ships-Concepts, Challenges and Precedents, 50 Ocean Development & International Law 141, 143, 156 (2019).智能系统的自主性水平系一个动态概念,它会随着客观外在环境的变化而上下浮动,而客观外在环境则包括所在航区的地理、气象和交通条件等。譬如,在所在航区系公海等环境相对单纯的区域时,智能船舶可能有条件采取更高标准的自主水平;而所在航区系港口区域等环境相对复杂的水域时,智能船舶的既定自主水平亦会受限,往往仍有赖于人的能动介入。[72]参见王国华、孙誉清:《21 世纪海盗:无人船海上航行安全的法律滞碍》,载《中国海商法研究》2018 年第4 期,第103 页。
基于上述客观实际,笔者建议在因系统错误引发的船舶碰撞责任体系中引入区段责任。申言之,在智能船舶采高标准自主水平的航行区段,在责任分摊上宜以系统生产者的产品缺陷责任为主,以船舶所有人等的船舶碰撞责任为辅;在智能船舶采低标准自主水平的航行区段,在责任分摊上宜以船舶所有人等的船舶碰撞责任为主,以系统生产者的产品缺陷责任为辅;在特殊情形下无法判断或证实该区段的自主应用水平,则应基于平衡鼓励技术发展与受害者利益保护的总价值目标,平均分配生产者和船舶所有人等之间的责任,并在个案中利用公平原则修正此平均责任配置的基本假定,同时可适当降低相关构成要件的认定门槛。
4.区分系统错误期间
智能系统的错误可能发生在船舶航运作业之前,也可能发生在船舶航运作业之中。前一情形又可分为两类:一类是系统本身在出厂时就存在故障等质量缺陷问题,另一类则是系统本身是满足质量要求的,但在安装到船舶上、与船舶本体相连接时出现的“适应性问题”(fit for purpose)。针对前一类,因属于系统的固有缺陷而使智能船舶作出错误行动造成碰撞事故,故当然可以追究系统生产者的产品责任。[73]参见王国华、孙誉清:《无人船碰撞相关的责任》,载《上海海事大学学报》2019 年第2 期,第123-124 页。针对后一类,尤其当系统生产商与船舶本体生产商分属不同主体时,由谁来对系统错误负责,目前尚存一定的争议。一般而言,由系统生产者承担此时的产品责任更具合理性。[74]参见范晓波、陈怡洁:《船舶无人化趋势下AI 航行系统的责任探析》,载《中国海商法研究》2021 年第4 期,第43 页。因为当智能船舶系统与本体可分时,系统生产者对系统的调试(包括与船舶本体连接时的“适应性”调试)更具有期待可能性,也是其应当履行的义务内容之一。而对纯粹的船舶本体生产者而言,至少在现阶段,我们无法苛求其能够预测到未来会被配置上系统以及何种自主水平的系统。他们不具有先验性能力,故不宜由其为此系统错误负责。
而在后一情形下,系统错误系在使用期间产生的。以远程遥控为例,此时若岸基操控人员有能力及时修复该系统错误而未修复或迟延修复,则岸基控制中心须承担过错责任,船舶所有人对此负相应的替代责任。若岸基操控人员因个人操作不当而引起系统失灵,则岸基控制中心亦须承担过错责任,船舶所有人对此负相应的替代责任。若系统生产者未及时更新修补系统自身漏洞而造成系统的错误决策,则生产者亦须承担相应的责任。[75]参见王国华、孙誉清:《无人货物运输船的法律冲突及协调》,载《中国航海》2019 年第1 期,第124页。系统生产者的义务并非在研制完成后即告终止,其还负有定期维护、升级、更新系统的动态义务,类似于债法上的后合同义务,不履行此义务则会触发上述责任。
(二)规则重构中的并行理念
前已述及,针对智能船舶因系统错误引发的碰撞责任,可能存在两种规制径路:一是船舶碰撞责任,二是产品缺陷责任。在我国国内法层面,船舶碰撞责任的承担依据主要是《海商法》的相关规定,而产品缺陷责任除了在《民法典》“产品责任”一章中有所规制外,其承担依据主要是《产品质量法》的相关规定。事实上,《海商法》与《产品质量法》都属于特殊领域和对象的侵权行为法,二者之间本身不存在孰为一般孰为特殊、孰为上位孰为下位的关系,而应当一并援用,共同追究相关主体的对应责任。再者,责任主体的并行并不意味着归责原则的同一化,原则上还应遵循各自应然的归责原则框架,兼采严格责任与过错(包括过错推定)责任归责原则。此即并行理念。
1.各方主体责任的并行
事实上,因智能系统错误引发的船舶碰撞,与传统意义上由船舶的零部件、硬件设备等质量缺陷导致的碰撞,总体上殊途同归。船上任何部件的质量缺陷造成的损失,可以归入产品缺陷项下损害赔偿责任的调整范畴,但其法律效果仅是将产品生产者或销售者作为共同侵权人增加进来,而并不能豁免船舶所有人、经营人、管理人等的碰撞法律责任。[76]参见王欣、初北平:《研发试验阶段的无人船舶所面临的法律障碍及应对》,载《中国海商法研究》2017年第3 期,第65 页。当前正处于智能船舶研制初期,此阶段充满了技术的不确定性及其带来的风险挑战,为了避免技术的“潘多拉魔盒”与“黑匣子”威胁,织密责任主体体系实属必要。
再者,一般侵权责任要求侵权行为、损害后果、因果关系、主观过错四要件,且在因果关系上采“有无”式“定性”标准。而当智能系统介入以后,侵权责任中的因果关系构成要件认定受到冲击,不再是简单的“全有或全无”的二元问题,而是转化为“占比多少”的多元问题,从“定性”问题发展为“定量”问题。[77]参见季若望:《智能汽车侵权的类型化研究——以分级比例责任为路径》,载《南京大学学报(哲学·人文科学·社会科学)》2020 年第2 期,第122 页。这就要求具体问题具体分析,综合评测各方主体在智能船舶航运作业中所起的作用,以及在碰撞事故中可归因性的强弱。各方主体整体上形成责任群,这也是在平衡鼓励科技创新与保护个体利益价值取向下的应有之义。
就船舶所有人而言,他的义务及责任期间覆盖系统从被挑选到实际作业再到检查与维护的全过程,义务及责任强度较高。由船舶所有人继续承受高强度的义务与责任更具有时效性,因为任何从事危险活动的人都应自负其责,且船东互保协会的保险制度能够有效确保第三方因碰撞造成的损失得到适当赔偿。[78]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno Pomorsko Pravo 75, 95 (2020).而就系统生产者而言,他的义务及责任期间则不仅涵盖前期的研制阶段,还应涵盖后期的持续性更新阶段。
2.不同归责原则的并行
在归责原则上,船舶碰撞责任一般以过错责任为归责原则,且在特定情形下船舶利益相关方可依法定程序行使海事赔偿责任限制的抗辩权;而产品缺陷责任遵循严格责任归责原则,且不存在赔偿责任限制的抗辩权得丧变更问题。因此,在涉及多个主体的赔偿责任追究与分摊时,应明晰规制径路,进而采用对应的归责原则。
若以船舶碰撞责任论处,则会涉及海事赔偿责任限制的丧失问题:若“损失是由于责任人的故意或者明知可能造成损失而轻率地作为或者不作为造成的”[79]《海商法》第209 条。,则船舶所有人的抗辩权行使将受阻,即无权享受总体责任限制的优待。在智能船舶实例中,上述直接故意和间接故意型过错的外在行为表现包括:(1)船舶所有人不遵守主管机关在可航区域范围上所作的明确限制性规定;(2)在航行作业之前或当时,明知系统在技术上尚不稳定、存在决策失误的较高可能性而仍轻率地依托系统的自主执行;(3)在航行作业之前和过程中没有制定并实施实时监督乃至紧急干预的应急预案,对碰撞事故持漠视态度;(4)在碰撞实际发生时,并未采取必要的人为介入性补救措施而放任损害的扩大。[80]参见王欣、初北平:《研发试验阶段的无人船舶所面临的法律障碍及应对》,载《中国海商法研究》2017年第3 期,第65 页。总体上,宜适当降低海事赔偿责任限制的丧失门槛,以此倒逼航运公司提高勤勉与注意义务,预防与规避智能系统的未知威胁。
结 论
智能船舶在航行效率、安全、成本、环保、工作环境等方面具有显著优势,这使得各国纷纷加快研制智能船舶的步伐,计划未来逐步过渡到完全无人驾驶船舶的高阶状态。科学技术的快速更新迭代与法律规则的缓慢修订调整,二者之间的潜在矛盾影响了智能船舶的稳定发展。可喜的是,由国际海事组织牵头,各国已着手推进智能船舶的规范化工作,目前也已初具雏形。在智能船舶法律属性的本源性问题上,智能船舶具有形式上的船舶地位,但尚不具有实质上的船舶地位;智能船舶整体及其系统部分本身均构成产品。
智能船舶因系统错误引发的碰撞责任,其规则体系构想可归纳为下表二。
需要指出的是,本文仅对智能船舶因系统错误引发的碰撞责任问题作了分析研讨。对于包括第三人原因在内的其他致损原因下碰撞责任承担,以及智能船舶的通过制度、承运人的航行过失免责、新型海盗行为规制等,这些前沿问题尚有待进一步的研究空间。
附录一

表一 国际海事组织海上安全委员会在推进智能船舶监管规范化上的努力[81] 会议要点摘自中国船级社发布的历届会议要点快报,参见中国船级社官网,https://www.ccs.org.cn/ccswz/。在用语上,因海上安全委员会采用“海上水面自主船舶”(MASS)的表达,故表一在梳理会议要点时沿用此表达方式。
附录二
附录三

表三 我国2018-2022 年期间涉船舶界定的案例
