基于Leica CityMapper混合数据的地形级地理场景构建
2024-01-15王宏昌
朱 磊,赵 菲,王宏昌
(1. 山东省国土测绘院,山东 济南 250102; 2. 山东省国土空间生态修复中心,山东 济南 250014)
地理场景是指一定时空范围内的各种自然要素和人文要素相互联系、相互作用所构成的具有特定结构和功能的地域综合体。地形级地理场景主要反映地形特征及地表地物信息,侧重于对地表高程、纹理等大范围地理环境的三维描述,适用于现实世界的宏观可视化表达。地理场景数据是对地理场景的空间位置、形态、纹理进行数字化表达的地理信息数据,是新型基础测绘的一种基础产品,是实景三维中国建设的重要组成部分[1]。
地理场景构建与快速更新技术已成为测绘界专家学者研究的热点,并取得了丰硕的成果。文献[2]以高速固定翼飞机搭载多镜头倾斜航摄仪获取3 cm分辨率倾斜影像,经空三加密、稠密点云生成、白模构建、纹理映射等步骤实现了城市级地理场景快速构建技术;文献[3]针对地理场景数据瓦片式建模的特点,综合模型数据生产组织和时空索引更新处理两个阶段,提出了适用于同类数据增量更新和不同类数据联动更新的技术策略和方法,研究了基于倾斜摄影模型的地理场景更新方法;文献[4]为解决地理场景更新的及时性和高效性,提出了利用无人机获取变化图斑点云数据,经滤波提取地面点,并进行平滑处理,输出数字模型,实现了地形级实景三维地理场景更新。
地形级地理场景构建一般采用DEM叠加DOM的方式,DEM与DOM生产一般需获取两次数据,且影像与点云时相较难一致。本文提出一种基于Leica CityMapper-2L混合航摄仪同步获取的点云与影像数据,联合生产DEM和DOM融合制作地形级地理场景的技术方法,以及对低旁向重叠度航空影像连接点匹配等关键技术进行分析,并通过试验对该方法进行验证。
1 关键技术
1.1 技术流程
基于混合数据的地形级地理场景构建主要技术流程为:①采用CityMapper-2L混合航摄仪同步获取点密度优于1个/m2的点云数据和0.2 m分辨率的航空影像数据;②对点云数据进行航带匹配、滤噪、自动分类和细分类处理,生成DEM和DSM数据;③对航空影像进行空三加密、基于密集匹配点云和同步LiDAR点云对航片进行数字微分纠正、镶嵌处理制作DOM;④DEM和DSM叠加DOM数据,融合制作地形级地理场景数据,制作流程如图1所示。
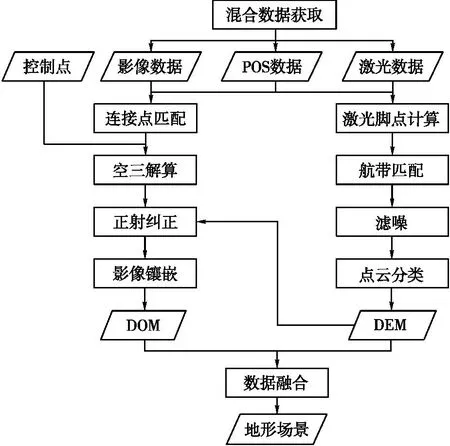
图1 地形级地理场景制作流程
1.2 DEM制作
通过IMU/DGPS数据解算、点云预处理、自动分类、人工编辑分类等工序,提取符合要求的地面点云,然后构建TIN、重采样制作DEM。
1.3 低重叠度影像连接点匹配
航空影像数据处理过程中,连接点匹配受影像质量、镜头畸变、地形、POS数据等多种因素的影响,其匹配效果直接影响空三精度[5-6]。
当相邻航带的影像重叠度低于20%时,影像之间的共同特征点数量减少,对连接点匹配造成一定困难。此时,连接点匹配可采取根据特征点方向分量和灰度进行匹配的方式完成,并通过最小二乘法(LSM)提高匹配精度。通过对图像进行多层不同程度的模糊处理,在每个金字塔层上运行自动的整体测区平差程序,以达到对连接点的强有力的内部质量控制,即使在结构较差的地区及山区也能产生有效的连接点。当连接点提取没有达到预期的精度和连接性时,再通过最小二乘法自动优化连接点,进一步优化结果。通过组合匹配方式,可使连接点的匹配达0.1像元的精度。
1.4 影像数字微分纠正
航空影像数字微分纠正可基于影像密集匹配生成的点云或同步获取的LiDAR点云两种方式进行[7-9]。基于密集匹配点云进行数字微分纠正,优点是可以利用现有的航空影像资源,但生成的点云精度可能受到影像质量、特征点匹配算法等因素的影响;基于LiDAR点云进行数字微分纠正,优点是LiDAR点云具有较高的精度和稳定性,可以提供更准确的纠正结果。
LiDAR点云滤波方式生成的 DEM 在平坦区域微分纠正效果较好,房子基本不会变形,山区植被覆盖率高的地方正射纠正的单片则会产生大量的树木拉伸现象,而采用影像密集匹配点云进行影像正射纠正效果较好,两者之间形成互补。因此,采用基于LiDAR点云为主、密集匹配点云为辅的微分纠正方式,可取得理想的纠正效果[10-11]。
1.5 融合构建地形级地理场景
以DEM为基底,叠加DOM作为地面纹理,并进行场景编译[12-13]。此种方式的优点是山体、地形等立体感表现较好,高程精度高,可进行精确的土方量算、淹没分析等。缺点是房屋、桥梁等地物因DEM置平,表现不出三维立体形态,陡涯等地形高差大的地区纹理不足,有拉花现象。
2 试验与分析
2.1 CityMapper-2混合航摄仪
CityMapper-2混合航摄仪是徕卡测量系统混合型传感器(如图2所示),集成了五视角倾斜相机和高性能激光雷达,单次飞行即可获取高分辨率五视角影像和高密度点云成果,影像与激光点云多源数据提供的信息具有一致性、冗余性和互补性,可以进行目前航空摄影测量常见的4D产品和三维模型生产。

图2 CityMapper混合航摄仪组成
2.2 试验情况
地理场景产品分级建设,省级层面负责亚米级地形场景建设,主要由0.5~2 m格网尺寸的DEM和0.2~1 m分辨率的DOM数据融合形成。在《实景三维山东建设总体实施方案》(2023-2025年)中,山东省级建设0.2 m分辨率的DOM和2 m格网的DEM[14]。
以山东某区域地形级地理场景建设项目为例,试验区位于胶东丘陵地区,采用CityMapper-2L混合航摄仪同步获取点云和影像数据,相对航高为3777 m,飞行速度为300 km/h。激光视场角设置为40°,旁向重叠度为20%,相机下视角旁向视场角为41.2°,影像旁向重叠度为22%,单架次获取优于1点/m2点云数据和GSD为0.2 m的航空影像数据约1800 km2。
首先对LiDAR点云进行航带匹配、滤噪、滤波处理,制作1 m格网DEM;其次航空影像匹配采用根据特征点方向分量和灰度进行匹配且与最小二乘法组合的方式,这样克服了航带重叠度小的难题;然后经空三加密,基于LiDAR点云与密集匹配点云相结合的方式进行微分纠正,以及影像镶嵌等步骤制作DOM;最后DEM叠加DOM并进行场景编译制作省级地形级地理场景,如图3所示。

图3 地形级地理场景
2.3 精度分析
(1)平面精度。在试验区域内均匀选择60个检测样本区域,并与采用网络RTK方法采集的平面坐标进行对比,计算模型平面位置误差。采用高精度统计方法,得到模型平面位置误差为0.498 m。
(2)高程精度。在试验区均匀选择6组精度验证区,采用网络RTK方法采集了312个高程检核点,去除粗差后,共获得305个高程差值,误差值呈正态分布,中误差为0.127 m。其中,21%的误差值优于4 cm;36%的误差值优于6 cm;74%的误差值优于8 cm;95%的误差值优于10 cm。
3 结 语
本文对地形级地理场景建设技术现状进行了分析,提出了基于同源混合遥感数据制作地形级地理场景的方法和技术路线,并对该技术中存在的技术难题给出了解决方案。结合省级基础测绘项目,通过山东某地区对该技术方法进行了验证。
采用该技术进行地形级实景三维更新,具有高程精度高、纹理与模型时相一致、节省更新成本等特点。该技术革新了地形级地理场景构建模式,在地形级地理场景更新,尤其是带状区域(新建高速铁路、公路、运河等)更新具有明显优势,且具有极高的推广应用价值。