串列蹼板推进器性能实验研究
2024-01-15张昭鹏辛龙庆
刘 鹏,张昭鹏,辛龙庆,马 良
(1.中国海洋大学山东省海洋工程重点实验室,山东 青岛 266100;2.青岛海洋科技中心,山东 青岛 266237)
目前,城市内河、湖泊等小型水域及近海水域上的水生植物和漂浮物的有效清理仍是一个难题[1-3](图1),这些漂浮垃圾和水生植物长久以来依赖“围、拦、拖”等方式,或者直接由人工打捞,或由清漂船舶收集。但人工清理方式不仅耗费大量人力物力,且效率极为有限,同时还存在着较大的安全隐患[4];而现有的清漂船多为人工操纵的大型船舶(图2),采用螺旋桨或明轮推进,存在噪声大,效率低、极易被缠绕等不足,且在一些小型水域中难以作业。因此,设计一种适用于小型清漂船的浅吃水船舶推进装置,同时避免水生植物缠绕、具备相对较高效率的推进器成为水域清漂作业的关键技术之一[5]。

图1 青岛近海浒苔情况

图2 明轮推进的清漂船
相对于螺旋桨和明轮,一些履带式两栖推进装置[6]结构小巧,简单轻便,运动时可减小水生植物缠绕的风险,同时具有吃水小、回转半径小等优点,尤其适合在浅水水域工作。一种采用串列式蹼板推进的方法[7]结合了明轮的结构设计,并对履带式推进装置进行了进一步地优化,使其更适合在水上推进,可以被作为清漂船推进器的选择之一。履带式推进方式最初是应用在军事上,其中应用最多的就是在1930 年被设计出来的履带式登陆舰(Landing Vehicle Track,LVT)。LVT 是船舶到岸作业最重要的现代技术贡献之一[8],所采用的履带式推进装置属于半潜式推进方式。为了增加在水面行驶时的推力,LVT 在履带板体上增加了涡轮状的叶片,最终将总效率提高到25%[9]。随后这种推进方式被应用在一些超重型两栖登陆艇上[10-11],这种车辆均具有两栖使用的功能,所以需使用较为密集的浮体代替蹼板来保证在水中的推进并且增加在陆地上的移动速率,但这样无疑限制了蹼板推进器在水中推进的性能。近些年来,履带式推进方式在向小型化进行转变,但大多依旧是应用在两栖机器人上。2014 年,CUI J 等[12]受蜈蚣运动启发设计了一种小型两栖机器人AmBot,用来检测西澳大利亚州的河口数据,其在水中运动时,由浮子组成的履带提供浮力和推力。2017 年,SUSANTO R D 等[13]设计了使用明轮和连续履带结合的两栖机器人,目的是使用一套推进装置完成在两栖环境中使用,从而缩小机器人整体尺寸,在水中,明轮为两栖机器人提供推进力。2018 年,HOSOTANI K 等[14]研究了一种柔性尖刺履带推进器,主要用于维护池塘和稻田。推进器最大尺寸约为45 cm,陆地和水上使用同一套推进装置,其在履带上布置柔韧的尖刺,利用尖刺阵列在水中产生推进力,工作时需添加浮体以保证其在水面的漂浮状态。
本文结合履带式推进的运动模式,在明轮的结构基础上设计出了一种串列式蹼板推进系统[15](Tandem Paddle Propulsion,TPP),推进系统依靠蹼板在水中的运动产生推力,相对于传统明轮式推进,串列蹼板式推进延长了蹼板在水下平动的运动时间和距离,缩小了旋转尺寸,解决了占用空间大的问题;在此基础上加工了串列蹼板推进系统的原理样机,并进行水槽试验,测试其推进性能情况;在此基础上将串列蹼板推进器安装于小型无人清漂船,实地检验其应用效果。
1 TPP 设计方案与样机
串列蹼板推进系统结合了履带式推进的运动模式,与明轮的工作原理一致,均是依靠蹼板划水获得动力。但与明轮不同的是,串列蹼板推进系统固定串列蹼板的驱动带需与水面呈平行状态,使得蹼板划水时与水面呈垂直状态,延长了蹼板在水下垂直水面划水的距离,减少了蹼板扬水的进程。
如图3 所示,2 为一级驱动轮,直径为56 mm,由直流电机1 驱动,驱动电机也可替换为燃油发动机从而提升动力。图3(a)中,4 为主动轮,直径142 mm,其后侧有与一级驱动轮2 等直径的二级驱动轮,二级驱动轮与主动轮之间相互固定,二者具有相同的转动速度,同时两者固联于中心轴12。主动轮通过传动履带5 将线速度传递给同步从动轮6,传动履带厚度约为5 mm,从动轮直径与主动轮直径相同,均为142 mm。主动轮与从动轮具有相同的线速度,由中心轴固定在支撑横梁8 上。

图3 串列蹼板推进器样机3D 设计模型
主动轮驱使传动履带运转,串列蹼板7 被等间距安装在传动履带上,数量共计12 个,间距约为136.7 mm,蹼板顶端需采用半柔性脚蹼形式,以避免缠绕或钩挂漂浮物,蹼板根部加装固定块与传动履带连接,固定块直接与传动履带固定连接,保证蹼板与传动履带之间的强度。由于传动履带为柔性材料制作,为防止履带在运行过程中发生凹陷变形,因此推进器样机在主动轮与从动轮之间放置两个支撑轮9 起到支撑履带的作用,支撑轮不提供动力,同样与横梁固定连接。为了使推进器控制入水深度,在横梁另一侧固定安装滑块11,滑块可沿导轨10 上下自由滑动,可以调节推进器的入水深度,以及与浮体之间的上下位置关系。整个推进器长约920 mm,宽约270 mm,高约340 mm,调整电机的转动方向可以实现推进器的向前或向后推进。如图3(b)所示,本文规定串列蹼板推进器左侧为前进方向,对应蹼板逆时针旋转。
此外,在串列蹼板推进器的实际应用中,还需考虑中心驱动轴的安装位置,应使驱动轴尽可能地高于水面安装,由此可以减少防水设施的使用,避免水下穿透的水密问题。串列蹼板推进器的中心转轴位置较低,在船体水上舷侧开孔穿过会对船体强度有不利影响。为了减少船体开孔,减少扬水飞溅对电机的影响,需抬高推进器的驱动转轴,因此,本文推进器选择二级驱动形式将驱动转轴抬高,远离船体和水面。
如图4 所示,一级驱动轮2 与二级驱动轮直径相等,并通过驱动履带3 连接,由此将电机输出的转矩传递至主动轮,从而带动主动轮旋转,使串列蹼板获得动力。
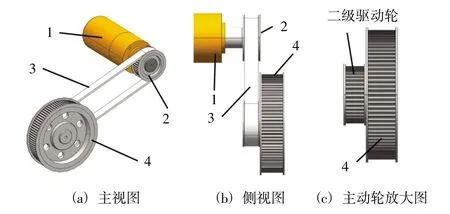
图4 串列蹼板推进器二级传动形式示意图
在水域中所使用的推进器多依靠蹼板或桨产生推力,因此蹼板或桨的设计对推进系统性能的优劣具有重要意义。对于以履带形式驱动的串列蹼板推进器此前很少有人涉及,因此本文要展开蹼板形态的设计,需要参考借鉴一些其他推进形式蹼板的设计思路。在众多水上的半潜式推进机构中最常见的是明轮推进器,而针对明轮蹼板的研究多集中于蹼板的展弦比和弯曲程度,二者的目的都是为了提高推进系统的推力和效率,其中蹼板的弯曲程度与其入水时对水面的扰动和引起的液体飞溅有关。因此,本文对蹼板自身的曲度进行设计,选择了直板、弧板和折板三种结构形式。
如图5 所示,其中弧板的设计来源于体育运动中划船所用的船桨启发,参照Macon 桨[16]的外形进行设计。
以上3 个蹼板面积相同,控制其展弦比相同,展长最大为95 mm,弦长最大为50 mm,蹼板厚度为2 mm。串列蹼板推进器所用的金属材料外表喷漆,进行防锈处理,制造出的推进器样机如图6所示。
2 TPP 推进性能实验方法
本实验在中国海洋大学的波流水槽中进行,水槽长30 m,宽0.6 m,高1.0 m。实验中来流的控制通过造流机系统进行,包括水流流速和深度等参数。实验过程中采用旋桨式流速仪进行实时监测过水断面的平均流速。如图7 所示,整个实验机构由控制系统、测量系统和机械传动系统组成。其中控制系统调节电机的旋转方向和速度,机械传动系统执行控制系统的命令,实现串列蹼板的周期性运动,随着蹼板的运转,测量系统通过力传感器接收推进器产生的推力,并通过软件进行信号采集和数据处理。图8 展示了实验装置的安装示意图。

图7 实验原理图

图8 现场实验装置图
如图7 所示,为了保证整个串列蹼板推进器能够平稳线性运动,实验采用在水槽上端两侧分别安装一条直线滑轨的方法[17],并在直线滑轨上各装上两个滑块,导轨与水槽侧壁坚实固定,以减少推进器运动时所产生的震动影响。串列蹼板推进器的蹼板处于水槽的中间位置,以减少水槽侧壁玻璃壁面对蹼板的影响。采用欧标3030 铝型材制作T 型支撑框架,并将其固定连接在滑块上,这些滑块允许T 型支架在实验中沿着直线导轨进行同步直线滑动。然后将串列蹼板推进器固定在两个T 型支架的下端,为了减少支架梁对测量结果的干扰,选择T型支架的下端长度对水流的影响尽可能小,并且两个支架的上梁长度大于水槽的宽度,保证推进器可以悬空安装在水槽的上方,而不会滑脱。力传感器一端连接在上游T 形支架的梁中心,另一端连接在水槽上方的固定梁上。为了获得串列蹼板在绝对坐标系下的线速度,实验使用非接触式转速仪测量已知直径的从动轮转速,当转速和流量达到稳定时,开始使用力传感器记录推力值。传感器的采样频率为50 Hz,获得的数据通过二阶Savitzky-Golay 滤波器进行处理[18]。
整体的循环水槽实验装置示意图如图9 所示。与推进器和水流互相干扰的区域尺寸相比,水槽的长度足够长,并且在其末端安装消波装置,因此在实验中可以忽略推进器产生的尾部波浪引起的尾迹反射对推力测量的影响。现场测量时的照片如图10所示,实验过程中使用的仪器如表1 所示。

表1 实验中使用的器材
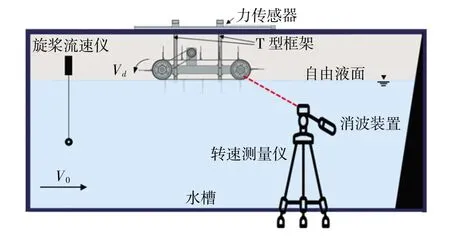
图9 循环水槽实验装置示意图
3 实验数据与讨论
3.1 数据采集与处理
实验装置安装完毕后,在水槽无水的情况下测试滑轨阻力。力传感器一端与T 型支架固定连接,另一端与牵引滑台连接,保证两端连接点共线。牵引滑台带动推进器在直线滑轨上匀速行驶并记录力传感器数值,重复3 次取平均值,此值可以被认为是推进器在直线滑轨上所受到的阻力。当水槽注水完成之后,受不同水深的浮力影响,推进器所受到滑轨上的阻力可能存在不同,但由于推进器浸没水中的部分体积很小,因此这种影响可以忽略。
在每次运行期间,瞬时力Fx以50 Hz 的速率采样。图11(a)中的灰线表示水流速度V0=0.1 m/s,蹼板速度Vd=0.5 m/s,入水深度hs=133 mm 的实验中Fx作为时间的函数曲线。可以看到,以50 Hz采样的原始信号显示出明显的波动。然而,为了更好的可读性,信号使用Savitzky-Golay 滤波器滤波,滤波器宽度在不同工况下样本宽度不一致。

图11 TPP 推力的时历变化曲线
图11(a)中的黑实线表示滤波后的信号。力信号在前22 s 内出现较为明显的下降波动,这是由于之前实验对自由液面的扰动可能未完全平稳。之后,力传感器的值趋于稳定但仍有波动,造成波动的原因可能是水槽的流量在运行中不稳定所导致的。每组工况的数据测量3 次,然后取平均值,所有的计算和分析都是使用此平均值进行的。
此外,在实验过程中串列蹼板推进器完整的力波动数据同样被记录下来,如图11(b)所示。在A阶段,蹼板均处于静止阶段,但水槽中的水流速度不为0,此时间段内推进器会受到水流的冲击,从而产生阻力。从最初的转折点(点1)开始,蹼板转速增加至设定值并开始产生相应推力,此时间间隔为B 阶段。随着数据的采集趋于稳定后,关闭蹼板转速和水槽水流,推进器产生的推力逐渐降至点2,此刻推进器产生的推力为负值,意味着承受阻力。虽然蹼板停止运动,但由于蹼板之前的运动对水流造成扰动,水流会产生惯性,因此水流的惯性会对推进器造成冲击从而产生了阻力,并随着惯性的消失逐渐减小,并趋于稳定,此时间间隔为C 阶段。在D 阶段,当自由液面稳定时,串列蹼板推进器所受到的力几乎为0,此时串列蹼板推进器受到力的过程完全结束。
3.2 入水深度对TPP 推力的影响
在实际应用中,推进器的吃水深度往往会随着船舶载荷的变化而变化,故蹼板的入水深度将随船体吃水的增加而增大。实验改变了蹼板的入水深度并测量其在不同入水深度下所产生的推力值。在实验过程中,选取入水深度分别在45 mm、95 mm 和133 mm 时进行测量推力值。图12 展示了不同蹼板入水深度下推力实验值与模拟值的对比情况,其中,数值结果参考文献[7]。
从图12 可看出,在三种不同的入水深度下,实验结果与数值结果趋势一致,推力与速度成正比,变化规律相同。当蹼板入水深度为45 mm 和95 mm 时,实验结果略大于模拟结果,计算值与实验值的误差较小,平均误差在10%内;当入水深度为133 mm 时,实验结果要小于模拟结果,二者之间的误差较大,但平均误差均不超过15%,最大误差不超过21%,最大误差在hs=133 mm,Vd=0.5 m/s时产生。与数值模拟中的三维模型不同,由于实验中使用了一些支撑结构,当浸水深度增加时,这些结构部分沉入水中受到水流冲击的影响,因此会产生附加阻力。而蹼板产生的部分推力将不得不用来克服这种阻力,导致测量的推力值下降,但这些误差仍然在可接受的范围内,由此可以证明本文中所采用的数值模拟方法具有一定的准确性。
3.3 蹼板形状对TPP 推力的影响
在上述实验过程中发现不同的入水深度会对蹼板背流侧的尾涡结构造成一定影响。因此本节选择了hs=95 mm 和hs= 171 mm 两种代表工况下,对蹼板曲度与推进性能的关系进行阐述。实验中测量了三种不同曲度的蹼板在入水深度hs=95 mm 时所产生推力的大小关系,如图13 所示。

图13 三种蹼板曲度下的推力实验值
从图13 中可以看出,三种蹼板产生的推力随速度的增加而增加,在实验速度范围内,直板产生的推力最大,弧板次之,折板最小。经过实验研究可以得到三种不同曲度的蹼板所产生的推力具有一定差异,但受实验器材的限制,无法很好地分析出这种差异的原因。故结合数值模拟发现:图14 展示的是推进效率随蹼板速度的变化趋势,效率的计算方式参考明轮效率的计算公式[19]。由图可以看出,当蹼板速度Vd=2.0 m/s 时,直板推进系统的效率要大于折板推进系统,随着蹼板速度的减小,折板推进系统的推进效率远大于直板推进系统,而弧板推进系统产生的效率介于二者之间。在现场观测中发现,折板引起的扬水量最大,直板最小,扬水量的变化趋势与效率的变化趋势相关,说明效率与扬水量存在一定关系,但扬水量并不是影响效率的唯一因素。折板推进系统在产生较高推进效率的同时也会导致较大的扬水量,因此,在折板推进系统的实际使用中,应当更严格地做好防水措施。

图14 三种蹼板曲度下的效率计算值(hs=171 mm)
3.4 TPP 的实船推进测试
图15 展示了清漂船的整体构造。清漂船采用双体船的结构设计,将上文所研发的串列蹼板推进器对称地安装在两个船体的内侧,外侧船体可以阻挡水域中的漂浮物,以免造成推进器的损坏。两船体之间的距离为835 mm,整船的长约为2.05 m,宽约为1.4 m,高约为0.6 m。在串列蹼板推进器之间放置存储容器,存储空间约为0.08 m3,用于储存收集物,其上方放置电池和控制系统,提供能源和发出运转指令。存储容器前侧安装收集装置,输送带上网状有透水孔,可以减少清漂船工作时的阻力。

图15 清漂船的整体构造
两串列蹼板推进器的速度可以分别控制,当两推进器的速度出现差值时,清漂船即可完成大曲径转向操作,当推进器蹼板运动方向相反时清漂船即可完成原地转向操作。清漂船的原地自转如图16所示,经过测量,船身转过90 °需要约10 s 的时间。

图16 清漂船原地自转测试
忽略测试环境中的风场影响,对双串列蹼板推进器驱动的清漂船的行驶速度进行测量,清漂船的速度U与蹼板速度Vd的关系如图17 所示。经过测量,在静水中,当前电机驱动功率(120 W)驱动下的串列蹼板的速度最大达到1.1 m/s 左右,对应船速约为0.42 m/s。船速与蹼板速度成正比,在较高的蹼板速度下船速的增长幅度变缓。

图17 清漂船速度与蹼板速度关系图
3.5 TPP 的扬水量测试
在现场测试过程中,特别注意了串列蹼板推进器在工作中产生的扬水现象是否与实验及数值模拟表现一致。图18 给出了串列蹼板推进器在水面测试中的扬水现象,并与数值模拟进行对比分析。

图18 现场水面测试与数值模拟对比图
如图18 所示,蹼板入水时会拍击水面,在拍击面周围激起波浪,短时间内会形成一个碗状无水区域。自由液面下的蹼板在快速移动时,会在蹼板的前进侧形成隆起,而在其另一侧则会产生由低压区导致的腔体,随着时间增加,蹼板产生的隆起和空腔会更加剧烈,随后蹼板上方会产生尖端朝向蹼板下边缘的锥形破碎波浪,从而产生通风腔。从图18 中可以看到测试中自由液面的情况与文献[7]中数模云图情况较为吻合。
4 结 论
本文设计了一种适用于浅吃水无人船的新型推进装置—串列蹼板推进系统,并根据三维设计方案,制造推进器样机,并进行不同蹼板速度、入水深度和曲度下的水槽实验,对蹼板运动过程中产生的推力数据进行测量和处理,并比较了已有数值模拟结果。
结果显示,推进器推力随着运转速度的增加而增大,但在不同蹼板浸没深度下推力的增加幅度不同,在浸没深度为95 mm 时,推力随转速变化最为剧烈;计算值与实验值趋势一致,数值相差不大,平均误差均在15%以内,验证了已建立数值方法的有效性和准确性。
单从推力来看,采用直板的推进器产生推力最大,折板最小,但结合扬水量及数值流场结果,在低进速系数下,折板的扬水量最小、效率最高,而直板的效率最低,故折板推进系统在拥有较高推进效率的同时,还会带来较大的扬水。
清漂船在双推进器的协同工作下可以完成原地自转,转向等操作,且推进器产生的扬水现象随着蹼板速度的增加而越来越明显。在一定范围内,清漂船的速度与蹼板速度呈线性增长,在目前电机功率的基础上,清漂船达到的最大速度约为0.42 m/s。
本文所提出的设计方案将对我国近海、内河、湖泊等水域的环境维护与信息监测提供技术与装备支持,助力城市“绿水青山”建设,相应实验测试方法与结果为无人清漂船的航行性能预报奠定基础。未来可进一步研究船体对推进器性能的影响及双推进器的回转操控特性,建立蹼板速度与转向角度的关系,尝试预报路径参数;此外,本文是以内河和小型景观湖泊等无波浪水域为背景,接下来可结合实验方法研究串列蹼板推进器在海洋波浪环境下的性能情况,建立不同海况下串列蹼板推进性能的预测模型。
