基于FPGA 的微波光子射频干扰消除控制算法与实验验证
2024-01-15徐龙健刘长俊韩秀友付双林谷一英赵明山
徐龙健,刘长俊,韩秀友,付双林,谷一英,赵明山
(大连理工大学 光电工程与仪器科学学院,辽宁省先进光电子技术重点实验室,大连 116024)
0 引言
随着无线通信技术的发展,人类社会步入了5G 时代。5G 技术的快速普及使得无线通信业务量急剧增加,不可再生的无线频谱资源捉襟见肘。为解决频谱资源稀缺这一难题,能够使频谱利用效率倍增的同时同频全双工技术逐渐成为无线通信技术领域研究的热点[1-4]。然而在全双工通信过程中,发射天线的高功率信号会进入近端的接收天线,对接收的低功率有用信号产生强干扰,甚至会将有用信号完全淹没,即射频自干扰[5]。射频自干扰是同时同频全双工技术实际应用亟需解决的首要问题[6]。射频自干扰消除的方法主要包括天线空域消除、射频域对消和数字域对消,通过这三种方法相结合来实现对射频自干扰的有效抑制。射频域干扰消除是同时同频全双工接收技术功能实现的关键环节[7-8],有效的射频域干扰消除可以降低进入接收机的干扰信号强度,避免接收机中模数转换器的饱和。
基于电学方法的射频域干扰抑制技术,由于微波器件的处理带宽以及调节精度限制,难以满足宽频段、大带宽的射频干扰消除要求。基于微波光子学的射频域干扰消除技术利用光域微波信号处理机制,将射频信号经直接调制或外调制转换至光域,在光域内对光载微波信号进行高精度的幅相与延时调控,达到与干扰信号的精确匹配,实现宽频段、大带宽干扰的有效消除[9]。因此,微波光子射频自干扰消除技术成为近年来同时同频全双工技术领域研究的热点,国内外相关单位开展了深入的研究工作,并取得了良好的进展,验证了微波光子射频自干扰消除技术的优势[10-15]。
在实际应用场景下,射频自干扰会随着周围环境的改变而动态变化,因此必须采取有效的措施对干扰消除系统进行自适应控制,使其满足实际应用的要求。2015 年,普林斯顿大学提出了基于Nelder-Mead 单纯形算法的微波光子射频自干扰消除方案[16],通过计算机运行Nelder-Mead 单纯形算法,控制半导体光放大器的偏置电流与输入光功率,来自适应抑制干扰信号功率,在中心频率915 MHz,扫频瞬时带宽60 MHz 条件下,实现了38 dB 的干扰消除深度。2021 年,上海交通大学提出了基于混合准则正则三角算法的微波光子自干扰对消方案[17],该方案使用高速示波器进行信号采集,在中心频率2.4 GHz,带宽100 MHz 条件下,实现了25 dB的干扰消除深度。2022年,南京航空航天大学提出了基于粒子群算法的光子射频自干扰消除方案,使用高速示波器进行信号采集,在计算机上运行优化算法,在X 和Ku 波段,带宽500 MHz条件下实现了优于28 dB 的干扰消除深度[18]。2023 年,西南交通大学提出了基于强化学习算法的光子射频自干扰对消方案[19],该方案利用高速示波器与计算机在中心频率5 GHz,带宽800 MHz条件下实现了20.18 dB 的干扰消除深度。
已报道的微波光子射频自干扰消除控制方案,大多采用高速示波器采集数据,使用计算机进行数据处理与算法迭代,控制系统体积较为庞大,较难满足移动平台、卫星通信载荷平台等系统集成化、小型化的应用要求。另外,已报道的光子学射频对消算法中,尚未考虑光域调控单元的调节精度和数据采集单元采样精度对消除深度以及算法迭代收敛判据的影响。本文基于现场可编程门阵列(Field Programmable Gate Array,FPGA)的微波光子射频自干扰对消控制算法,考虑实际光域调控单元的调节精度和数据采集单元的采样精度来设计算法的收敛判据,建立了具有反馈控制功能的微波光子射频对消系统,在FPGA 中完成了基于互相关算法与粒子群算法相结合的射频对消自适应寻优算法,实验上实现了在中心频率2.4 GHz,带宽40 MHz 条件下35 dB 的干扰消除深度。
1 微波光子射频干扰对消理论分析
图1 为基于直调激光器(Directly Modulated Laser,DML)的微波光子射频自干扰抑制链路原理框图。全双工模式下,接收天线(Receiving Antenna,RA)接收到来自发射天线(Transmitting Antenna,TA)的强干扰信号SI(t)与远方发射天线发送的有用信号SOI(t),接收的信号SOI(t)+SI(t)由DML2 调制转换至光域。在发射机TX 耦合出一路射频信号Ref(t′)作为对消所用的参考信号,由DML1 调制转换至光域。Ref(t′)与SI(t)处于同一频率,若两信号满足等幅反相和延时匹配条件,则合路后自干扰信号会被完全消除[9]。Ref(t′)经过DML1 电光调制后,到达光耦合器(Optical Coupler,OC)之前的功率可表示为

图1 微波光子射频干扰对消系统示意Fig.1 Schematic of microwave photonics RF SCI system
式中,α为可调谐光衰减器(Variable Optical Attenuation,VOA)引入的光功率调节系数,γ0为参考信号在链路中传播引入的光功率衰减系数,S1代表DML1 在线性区的斜率效率,单位为W/A,I0为直流分量振幅,IRef为输入到DML1 的参考信号Ref(t′)的振幅,τ为可调光延时线(Tunable Optical Delay Line,TODL)引入的时延量,ω为射频信号的角频率。
天线接收的信号SOI(t)+SI(t)经过DML2 转换至光域,在微波光子链路中传输到达光耦合器之前的功率可表示为
式中,γ1为传播的光功率衰减系数,S2代表DML2 在线性区的斜率效率,ISOI代表有用信号的振幅,ISI代表干扰信号振幅。
参考支路和干扰支路的光载射频信号在光耦合器中合路,进入光电探测器(Photodetector,PD)中完成光电探测,将光信号转化为电信号,PD 的输出信号可表示为
将式(3)中iSI(t)-iRef(t′+τ)展开,省略直流项,可得
式中,ρ为PD 的响应度,表明电信号的幅度与光信号的强度成正比,因此参考信号与干扰信号在光域中的强度比值和在电域中的幅度比值是相同的。
由式(4)可知,通过调节参考支路的光载射频信号的衰减与延时,当满足式(5)与(6)的条件时,干扰信号SI(t)就可以被参考信号Ref(t′)完全抵消[20-21]。
考虑实际应用中光域调控功能单元不可避免会出现一些非理想情况,无法在每个频点都能满足式(5)与(6)对应的关系,干扰信号无法被完全消除。将式(5)等号两端作比可得
式中,x表示电域中参考路与干扰路的幅度不匹配度,也可以理解为光域中参考路与干扰路的强度不匹配度,当x=0表示两路完全匹配。将干扰信号对消前后的平均功率比值定义为系统的射频干扰抑制度,表示为
式中,Δτ为参考路与干扰路的延时偏差。利用帕塞瓦尔定理将单频点的对消深度推广到带宽信号[22],一定带宽下的干扰抑制度可表示为
式中,B为干扰信号带宽。
即单频点信号经过微波光子射频自干扰消除系统后的抑制度为(单位:dB)
带宽信号经过微波光子射频自干扰消除系统后的抑制度为(单位:dB)
由干扰抑制度表达式可以看出,影响微波光子射频对消系统干扰抑制度的关键因素为参考信号Ref(t′)与干扰信号SI(t)的幅度失配与时延失配(相位失配)。根据式(11)利用Matlab 软件仿真分析中心频率2.4 GHz、带宽100 MHz、时延失配±5 ps、幅度失配±0.5 dB 条件下系统的干扰抑制度变化情况,结果如图2。
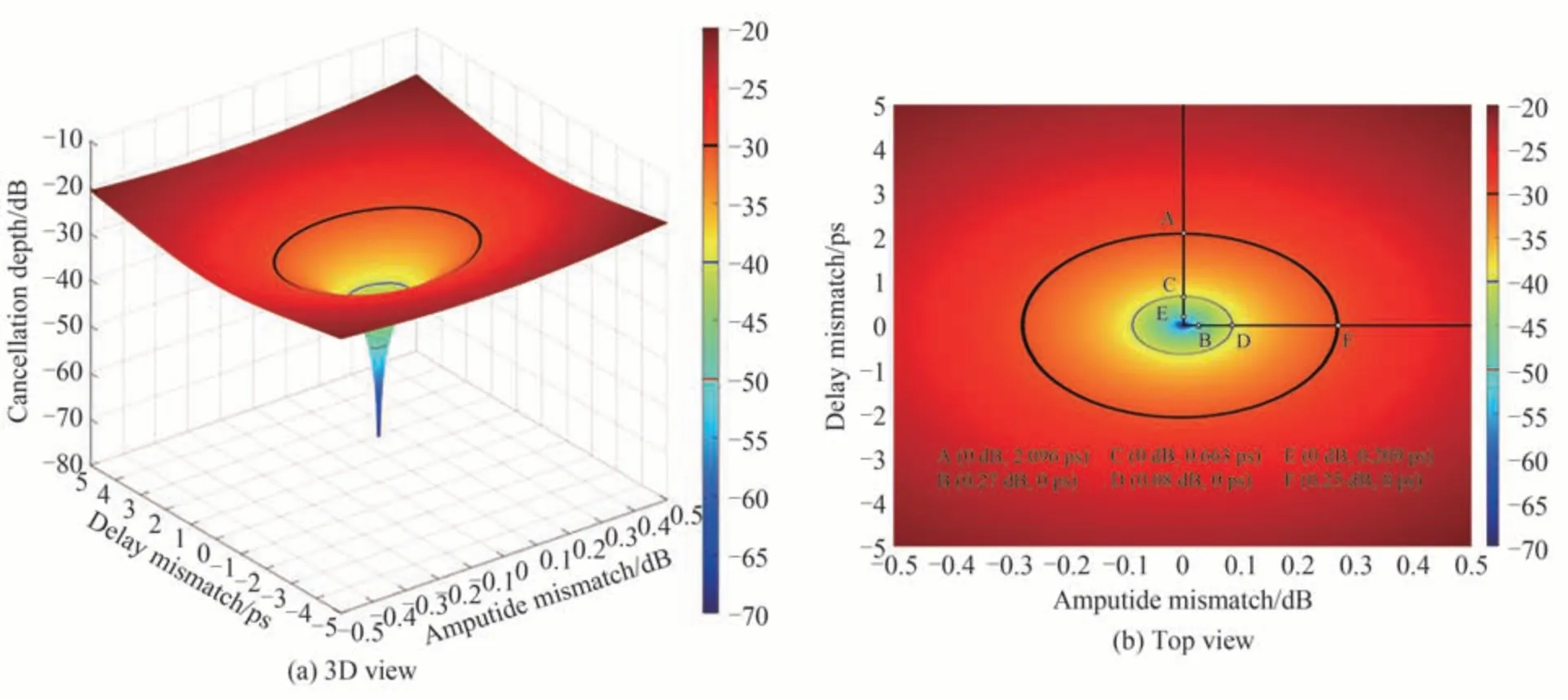
图2 幅度失配与时延失配对消除深度的影响Fig.2 Impact of amplitude mismatch and delay mismatch on the cancellation depth
由图2 可知,在2.4 GHz 中心频率下,若要达到30 dB 对消深度,时延失配应不超过2.096 ps,幅度失配不应超过0.27 dB。对消深度40 dB 则要求时延失配不超过0.663 ps,幅度失配不超过0.08 dB。同样,若达到50 dB 对消深度,则要求时延失配不超过0.209 ps,幅度失配不超过0.025 dB。由以上分析可知,在光域中信号强度的不匹配度与电域中信号幅度不匹配度等价,因此在光域中对强度失配量的调节等价于在电域中对幅度失配量的调节。光域衰减与延时调控单元的调节精度决定了参考信号Ref(t′)与干扰信号SI(t)的最小幅度失配量和时延失配量,从而影响系统的射频干扰消除能力。根据图2,列出中心频率2.4 GHz、带宽100 MHz,在典型幅度和时延失配量条件下可以达到的理论最大干扰抑制度,如表1。由表1 可以看出,当幅度失配小于0.1 dB 时,时延失配对系统干扰抑制深度的影响较大,时延失配量越小,系统干扰抑制能力越强;若幅度失配在0.5 dB 及以上,即使时延失配很小,系统也较难达到很高的干扰抑制度。因此在实际调控过程中,可以先对幅度进行调节,使其失配量尽可能较小,然后再进行时延调节,以达到最佳的匹配状态。

表1 典型幅度与延时失配量条件下的系统理论最大干扰抑制度Table 1 The theoretical maximum interference cancellation depth under typical amplitude and delay mismatch
系统幅度与延时的失配量决定了射频干扰的抑制能力,由于光域调控单元的调节精度有限,会产生一定的幅度与延时失配量,因此其调节精度在一定程度上影响了干扰抑制的能力。在对微波光子射频干扰消除系统进行反馈算法控制时,需要使用模数转化器(Analog-to-digital Converter,ADC)对残留干扰信号进行采样,采样的精度决定了能够监测到残留干扰信号功率变化的程度。因此,控制算法实际运行时能够实现的干扰消除深度受到光域调控单元的调节精度和ADC 采样精度这两个因素的影响。在干扰功率极高的情况下,系统在对消的过程中,对消深度进一步的提升首先会受到光域调控单元调节精度的影响。在干扰信号功率较低的情况下,当残余信号功率达到ADC 灵敏度的时候,对消深度的进一步提升就会受到ADC采样精度的影响。以上这些因素在设计算法的收敛判据时需重点考虑。
2 微波光子射频干扰对消算法
图3 给出了基于FPGA 的微波光子射频干扰消除系统的反馈控制流程图。参考信号、干扰信号与剩余自干扰信号经过下变频后由ADC 进行采集,采用FPGA 实现干扰消除的反馈控制,其中包括对于ADC 的驱动控制、数据的缓存与功率统计、数字信号处理、算法迭代寻优、控制指令换算、串口通信控制等。FPGA通过驱动四个ADC 模块实现对下变频干扰信号、下变频参考信号、90°移相下变频参考信号以及剩余干扰信号的采集,并对采样数据做缓存处理与功率统计。根据对消模型与应用场景,研究基于FPGA 来实现互相关(Cross-Correlation)算法与粒子群(Particle Swarm Optimization algorithm,PSO)算法相结合的幅度与时延两维调控寻优算法,互相关算法和粒子群算法相结合的算法流程如图4。

图3 基于FPGA 实现微波光子射频干扰消除系统的反馈控制流程图Fig.3 Flow chart of feedback control for microwave photonics RF SIC system by FPGA

图4 互相关算法和粒子群算法相结合的算法流程图Fig.4 Flow chart of cross-correlation and particle swarm optimization combining algorithm
互相关算法与粒子群算法联合调控的思路如下:通过互相关算法得到干扰信号与参考信号之间的幅度差与延时差,并检测自干扰信道突变,将幅度差和延时差作为粒子群算法迭代的初值,粒子群算法根据剩余自干扰功率迭代更新幅度与时延调控量,通过串口通信控制,使光域调控单元的调节值得到更新,进行参考信号的寻优,经过互相关算法与粒子群算法的联合调控,可使干扰信号被快速抑制。
两个信号做互相关,数值大小表示了两个信号间的相似性,是两个信号之间相对于延时的函数,也称为“滑动点积”。若以离散序列来说明互相关原理,则对于采样得到的参考信号Ref(n)与自干扰信号SI(n),互相关函数定义为
式中,m为参考信号与干扰信号采样后的序列差。函数sr(m)代表了参考信号Ref(n)与自干扰信号SI(n)相关性随m的分布。当相关函数sr(m)随m变化出现最大值时,表明两信号相似性最高,即得到了两信号间的时延序列差。将互相关原理结合干扰对消模型,移相器件将参考信号进行移相,干扰信号与参考信号、90°移相参考信号间的互相关值与,反映了干扰信号与参考信号间的相似性,则参考信号调节满足式(13)与(14)时,参考信号与干扰信号最为匹配。
式中,P为干扰信号功率,α为可调谐光衰减器VOA 引入的衰减值,τ为可调光延时线TODL 引入的延时量,fc为干扰信号频率。
FPGA 计算三角函数、平方根等复杂的数学模型较为受限,通常这些数学模型的计算需要通过查找表或近似计算的方法来转换为硬件易于实现的方式。本文利用坐标旋转数字计算(Coordinate Rotation Digital Computer,CORDIC)算法[23]来计算衰减值α与延时量τ。
CORDIC 算法是一种数学计算逼近的方法,以向量坐标旋转为例,如图5,向量M0旋转角度θ0至M1,则M1可由M0及旋转角度θ0表示为

图5 向量坐标旋转及求解示意Fig.5 Schematic of vector coordinate rotation and solution searching
以此类推,第i+1 次旋转可表示为
式中,s为向量旋转的次数。为了使FPGA 易于实现移位运算,由于逼近的过程中旋转角度θi很小,将tanθi以一定精度,用2 的负数次幂近似计算,即
式中,di为-1 或1,代表tanθi的正负。为确定di的值,引入变量z,根据条件令zi执行加或减tan-12-i,的迭代可表示为
若坐标由M0旋转迭代s次最终使y趋近于0,向量模式每次微旋转的旋转角度存储在变量z中,即得到所求向量模值与旋转角度,表示为
粒子群算法的思想源于对森林中鸟群觅食行为的探索[24],鸟群在觅食的过程中通过自身信息的获取和集体的信息共享使鸟群找到最优目的地。对应微波光子射频干扰对消模型,粒子群算法中每一个粒子都是二维的,都代表了对消系统的幅度调控变量db和延时调控变量dt的组合。粒子的位置代表了当前衰减和延时的调节量;剩余干扰信号功率可以直接且实际的体现幅度和延时调节组合对消除深度的影响,因此选取幅度和延时调控组合对应的剩余干扰信号功率作为粒子的适应度,即粒子的评价指标。微波光子射频干扰消除的粒子群算法流程如图6。

图6 微波光子射频干扰消除的粒子群算法流程Fig.6 Flow chart of particle swarm algorithm for microwave photonic RF self-interference cancellation
每个粒子都会在迭代过程中出现调控衰减与延时对应剩余自干扰功率最小的情况,此时,dbp代表个体最优衰减调控量、dtp代表个体延时调控量、pp代表个体最优剩余功率。对于粒子群集体,在迭代过程中也会出现剩余自干扰功率最小的情况,dbg代表了集体最优衰减调控量、dtg代表了集体延时调控量、pg代表了集体最优剩余功率。每个粒子的衰减与延时组合调控完成后都会更新dbp、dtp和pp三个变量。粒子群中所有粒子一轮调控完成后,则更新dbg、dtg和pg三个变量,以个体最优值与集体最优值更新每个粒子下一轮的粒子调控组合。
如图6 所示,粒子群算法实现微波光子射频干扰消除反馈寻优的具体过程为:
1)互相关算法运算完成后,计算出的干扰信号与参考信号的近似幅度差与时延差,标志位拉高,作为粒子群算法迭代的初值。
2)首轮迭代粒子群算法在初值的各个方向平均对八个粒子给定衰减值db和延时值dt。赋值完成后八个粒子的衰减延时调控组合db与dt经串口通信依次发送命令至光域调控单元可调光衰减器VOA 与可调光延时线TODL 的控制端。调控完成后采集每个粒子的衰减与延时调节组合对应的剩余自干扰信号功率。
3)若为第一轮迭代,粒子对应的剩余功率分别作为粒子的个体功率最优pp,对应的调控组合为个体衰减最优值dbp、个体延时最优值dtp,粒子群集体中的剩余自干扰信号功率最小值作为粒子群的集体功率最优pg,记录对应的调控组合为集体衰减最优dbg、集体延时最优dtg;若不是初次迭代,则将本轮剩余自干扰信号功率与pp、pg比较,若小于pp,则更新pp、dbp和dtp,小于pg,则更新pg、dbg和dtg。
4)判断pp与迭代次数等是否满足收敛判据条件,若算法收敛则执行6),不收敛则执行5)。
5)由迭代次数更新惯性权重系数w、学习因子c与随机数r,算法迭代初期采取较大的惯性权重w并使学习因子c1略大于学习因子c2,以加强全局搜索能力。第M轮迭代过后,降低惯性权重w,在第N轮(N>M)迭代后使学习因子c1小于学习因子c2加强局部搜索能力,加快算法收敛。迭代过程中控制调控值小于VOA 与TODL 的调控范围。由式(20)与(21)更新衰减步进量与延时步进量。更新db与dt,再执行步骤3)。
式中,k为当前迭代次数,i代表粒子编号。
6)VOA 与TODL 输出dbg、dtg,对消反馈寻优结束。
算法迭代判断可由流程图7 表示。如第1 节所述,算法迭代的判断需要同时考虑光域调控单元的调节精度和ADC 的采样精度。在已知光域幅度调节单元精度与光域时延调节单元精度下,确定系统由调节单元精度所决定的最大对消深度,设为CMAX。由ADC 的位数决定的该ADC 采样精度下的极限功率值,设为Pmin。算法对消前,统计剩余干扰信号功率为P0,按照Pmin与干扰信号功率P0评估ADC 可以达到的对消深度CADC,并将CMAX与CADC做比较,判断系统的对消深度是受光域调控单元的调节精度还是ADC 采样精度的影响,若光域调节精度影响了系统最大对消深度,则此条件为迭代判据一;若ADC 采样精度影响了系统最大对消深度,则此条件为迭代判据二。
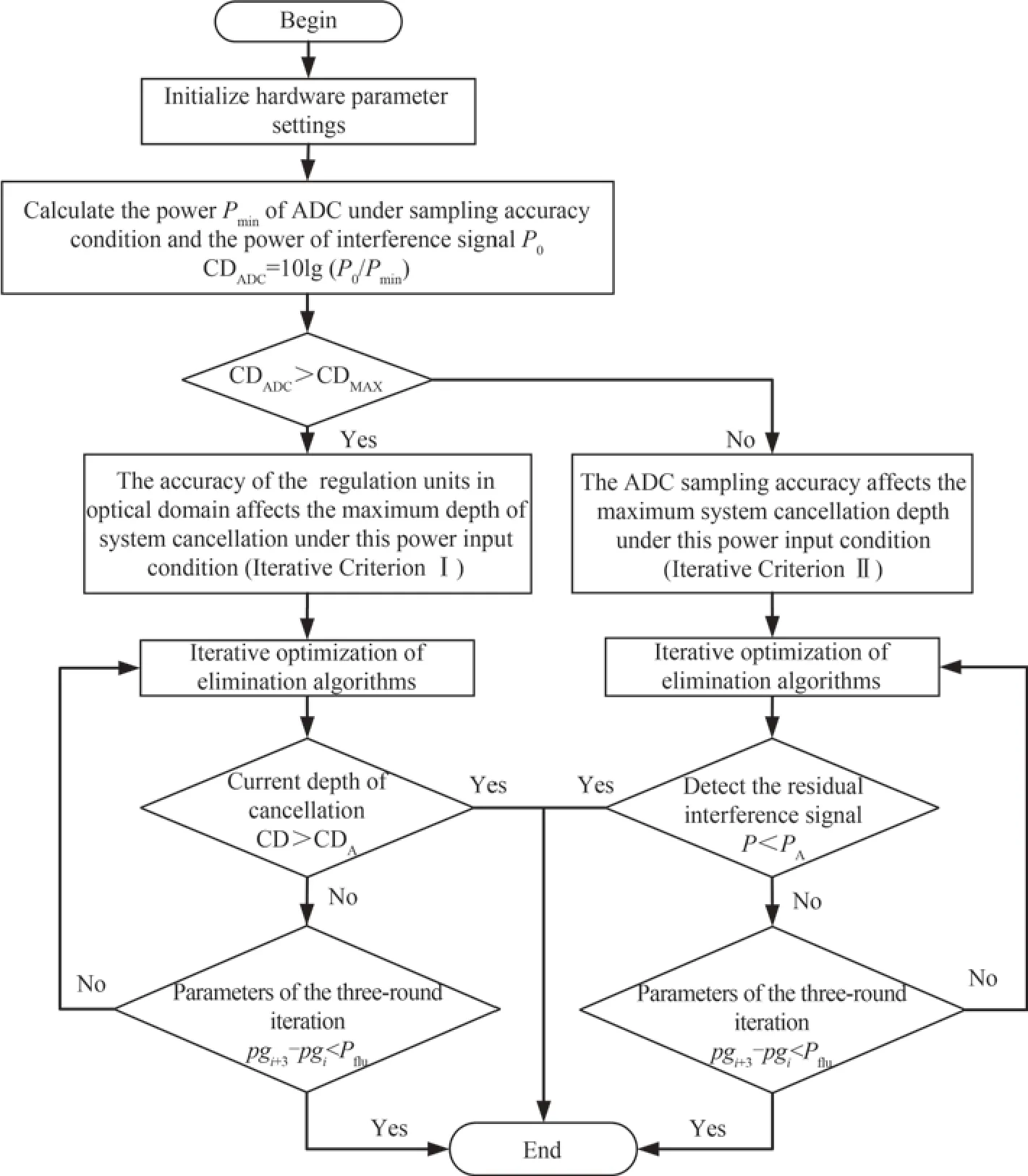
图7 微波光子射频干扰对消控制算法流程Fig.7 Flow chart of microwave photonics RF SIC control algorithm
当对迭代判据作出判断后,算法进行迭代寻优。当为迭代判据一时,为了提高迭代效率,设CA为一个略小于CMAX的值,当实际对消深度C大于CA时,说明此时的对消深度已经很接近于该系统能够实现的最大对消深度了,则停止迭代;当C小于CA,但其仅在很小的范围内波动时,为了提高迭代效率,当超过三轮迭代后,C仍在很小的范围内波动时,则认为满足收敛条件,停止迭代。
当为迭代判据二时,同样为了提高迭代的效率,将采样信号的功率P与一个略小于ADC 在采样精度条件下的极限功率的值PA作比较,当P小于PA时,说明此时的对消深度已经很接近于该系统能够实现的最大对消深度了,则停止迭代;当P略大于PA,但其仅在以很小的范围波动时,为了提高迭代效率,当超过三轮迭代后,P仍在很小的范围内波动时,则认为满足收敛条件,则停止迭代。
以上两个迭代判据使该算法在应用于实际情况中,可以针对不同情况进行判断从而选择合适的迭代路径和停止条件,提高算法运行的效率。
3 微波光子射频干扰对消算法实验验证
图8 给出了微波光子射频干扰抑制系统的实验框图。由于互相关算法的实现需要在干扰信号与参考信号合路前进行数据采集,因此对图1 所示的原理框图进行了改进,采用两个光电探测器(PD1 和PD2)分别实现信号的光电探测,以此满足射频对消算法控制的需求。采用信号源生成中心频率2.4 GHz 的射频信号,调制带宽40 MHz、功率为0 dBm,该信号经巴伦分成两路反相信号,模拟干扰信号与参考信号,分别输入至直调激光器DML1 与DML2。DML1 输出光信号经由光域调控单元进行幅度延时调控,再由光电探测器(PD1)拍频输出,作为对消的参考路;DML2 输出光信号经过光纤进入PD2 拍频输出,作为对消的干扰路。光电探测器拍频得到的参考信号与干扰信号都由功分器(Power divider)分为两路,参考路中的一路参考信号经过电桥(Hybrid)生成50∶50 的0°参考信号与90°参考信号,在经过下变频后由ADC1 与ADC2 进行采集。

图8 微波光子射频干扰对消算法控制实验框图Fig.8 Experimental structure of microwave photonics RF SIC system with feedback control
参考路中一路参考信号直接与干扰路中的干扰信号进行合路对消,为实时观察对消状态,对消后的剩余自干扰信号经过放大器放大后分为两路,一路作为系统输出,连接电频谱分析仪(Electrical Spectrum Analyzer,ESA),另一路作与本振信号源生成的本振(Local Oscillation,LO)信号进行下变频后由ADC3 采集。干扰路中的另一路干扰信号经过下变频后由ADC4 进行采集。ADC3 采集的剩余自干扰信号经过信号处理后作为粒子群算法迭代寻优的判断依据,ADC1、ADC2、ADC4 采集的参考信号与自干扰信号经过信号处理作为互相关算法的计算依据。算法迭代处理后产生的调控指令,通过FPGA 与串口模块对光域幅度和延时调节单元进行控制,通过多次优化迭代达到对干扰信号消除的目的。
图9 给出了优化迭代过程中,光域幅度与延时调控量组合向量值的变化轨迹及对应的消除深度。记录的过程如下:在对消优化迭代过程中,算法判断出现消除深度更为优异的状态时,记录此时算法计算的对消深度与光域调节单元调控量的组合,将该光域调节单元调控量组成的向量记为Gbest。每当一轮迭代中出现更优的调节量时,Gbest 将更新,经过多轮迭代直至算法达到收敛条件,最后使算法收敛的光域调节单元调控量也就是Gbest 最终的位置,将随着迭代过程中不断更新的Gbest 的位置记录并绘制成变化的轨迹。从图9 可以看出,寻优过程Gbest 从状态0 变化至状态9 时基本达到了最优对消深度,继续迭代粒子群算法,达到pgi+3-pgi 图9 微波光子射频干扰对消深度随最优幅度与延时调节量变化的轨迹Fig.9 The RF SIC depth versus the optimal attenuation and delay adjustment of microwave photonics RF SIC system 图10 基于FPGA 控制算法的微波光子射频干扰抑制过程的频谱演化Fig.10 Spectrum evaluation of RF self-interference signal with FPGA-based microwave photonic cancellation 另外,对第2 节的两个算法迭代判据条件进行实验验证。首先在设置实验系统中光域幅度调节单元的精度为0.05 dB、光域时延调节单元的精度为1 ps。输入干扰信号功率为10 dBm,此时输入干扰功率较高,每次迭代后ADC 的采样精度足以支持采样并检测出循环调控后残留干扰信号功率的变化,干扰消除深度的进一步提升就受限于光域幅度和延时调控单元的调节精度,此时执行的算法迭代判据为迭代判据一。算法运行完成后,对消前后频谱如图11,可以看出对消深度达到35.3 dB,在对消后仍有较高功率的残留干扰信号。 图11 迭代判据一的射频干扰抑制前后频谱图Fig.11 Spectrum of RF self-interference cancellation for the iterative criterion I 接下来考虑输入干扰功率较低的情况。实验系统的其他条件不变,将输入干扰信号功率设置为-15 dBm,此时计算得到的对消深度CADC小于系统本身的对消能力CMAX,则按照判据二进行算法迭代优化。算法运行完成后,对消前后频谱如图12,可以看出实现的对消深度为19.4 dB,残留干扰信号的功率已接近系统噪底。 图12 迭代判据二的射频射频干扰抑制前后频谱图Fig.12 Spectrum of RF self-interference cancellation for the iterative criterion II 以上实验测试结果验证了本文采用FPGA 进行微波光子射频自干扰消除反馈控制的可行性,以及综合考虑光域幅度、延时调控单元的调节精度和ADC 采样精度进行判据优化方案的有效性。目前实验系统采用了较多的分立电学器件,在一定程度上会影响系统的工作频率、带宽等。然而,单片微波集成电路(Monolithic Microwave Integrated Circuit,MMIC)技术的快速发展推进了电学器件的性能和集成化大幅度提升[25],集成光子射频干扰消除芯片技术亦取得了良好的进展[26-27],通过光电混合集成可使光子射频干扰消除芯片与反馈控制单元集成在一起,发挥光电融合技术的优势[28-29],实现宽频段、大带宽射频干扰消除系统的功能集成和小型化。 针对同时同频全双工通信系统面临的射频自干扰问题,开展了基于FPGA 的微波光子学的射频干扰消除控制算法研究,设计并搭建了微波光子射频自干扰消除系统,实验验证了基于FPGA 的射频自干扰消除控制算法的可行性。在FPGA 中进行互相关算法与粒子群算法相结合的对消算法寻优,简化了优化迭代次数,提出了综合考虑微波光子功能单元调节精度与ADC 采样精度的算法迭代判据,更能满足实际微波光子射频自干扰消除系统的反馈控制要求。基于FPGA 实现了微波光子射频干扰消除优化算法自适应控制功能,实验测试在中心频率2.4 GHz、带宽40 MHz 条件下,实现了35 dB 的干扰消除深度。本文研究工作对于微波光子射频干扰消除技术的集成化、实用化起到了良好的推进作用。



4 结论
