UPRE方法在图像恢复正则化参数自适应选择中的应用
2024-01-14加春燕
加春燕
(北京工业职业技术学院基础教育学院,北京 100042)
0 引言
图像在成像、传输、扫描、显示等过程中,由于摄像机与物体相对运动、系统误差、畸变、噪声等各种因素的影响,会不可避免地产生质量降级。图像恢复就是对降质图像进行处理,尽可能提高图像质量。图像恢复在交通、军事、天文、医疗、人工智能等领域应用广泛[1]。
由观测到的降质图像来重构图像,在数学中是一个典型的反问题。由于受到模糊效应(如运动模糊、散焦模糊)和噪声(如高斯噪声、椒盐噪声)的干扰,这类问题解的存在性、唯一性和稳定性往往不能保证,其解通常是不适定的[2]。常用的改进办法是正则化方法,它可以把病态方程转化为适定性方程来求解,在极小化正则解与理想解差的同时,兼顾图像的光滑性。目前,在图像恢复中应用较为广泛的正则化方法包括Tikhonov正则化方法、总变分(Total Variation,TV)正则化方法等[3],其中涉及的重要参数称为正则化参数。正则化参数的作用,主要是控制保真项与光滑项的平衡,如果该参数过小,则恢复图像的光滑性就会很差;但如果该参数过大,则恢复图像会出现过度光滑而失真的问题。因此,正则化参数的选择对图像的恢复效果有着非常重要的影响。
本文通过分析正则化参数与图像先验信息的关系,采用无偏预计风险估计方法(Unbiased Predictive Risk Estimation,UPRE)实现正则化参数的自适应选择,通过数学理论证明该方法的可行性,并基于图像恢复实验验证了该方法的有效性,对于改善图像恢复效果具有重要的应用价值。
1 正则化参数在图像恢复中的作用
记f为理想的高清图像,K代表模糊效应,η为高斯白噪声(设方差为σ2),d是实际观测到的图像,则图像降质过程可用数学模型来表示
图像恢复的目的是从观测图像d出发,借助K和η的某些先验信息来重构图像,使其逼近理想图像f。经典的TV正则化方法,通过极小化正则函数来进行图像恢复
欧拉-拉格朗日方程为
利用式(3),将泛函问题转化为变分问题,有助于数值解的计算。图1所示就是不同的正则化参数代入式(3)计算得到的图像恢复结果。

图1 不同正则化参数对应的图像恢复结果图
图1(a)中实线是理想图像f,圈线为观测到的降质图像d。使用TV正则化方法对图像d进行恢复,当正则化参数α≈0.04,恢复图像逼近理想解f(见图1(b));当α=0.001,光滑项被抑制,恢复结果高度振荡(见图1(c));当α≈0.84,光滑项又过度增强,恢复结果虽然光滑但远远偏离了真实图像(见图1(d))。由此可见,选择合适的正则化参数非常重要。
正则化参数通常凭借主观经验或大量实验进行人为选取,或者不够准确,或者耗时耗力。广义交互验证方法(Generalized Cross Validation,GCV)基于统计学的知识自适应选择正则化参数,但该方法需要较大数据量作为支撑且计算时间较长,因此,有必要探寻一种自适应的选择方法。
2 UPRE方法的理论分析
UPRE方法最初是Mallow在分析线性回归模型中提出的,后来应用于求解反问题和图像处理。记正则化参数α对应的正则解为fα,希望找到合适的参数α使得误差‖fα-f‖最小,然而,由于f未知,可以转而寻求使预计误差最小的正则化参数。
定义预计误差pα
pα虽然无法直接计算,但可以通过一定方法估算出来。UPRE方法的原理就是最小化预计误差pα的均方范数,也称为预计风险。
定义预计风险
定义UPRE函数
式(6)中,σ2是噪声η的方差值。假设正则解fα线性依赖于观测图像d,二者关系表述为fα=Rαd,其中Rα常被称为正则化矩阵,对应的影响矩阵记为Aα=KRα,trace(Aα)是计算Aα的迹。
采用“迹定理”(Trace Lemma)证明UPRE函数的期望与预计风险的期望相同,把求期望运算转化为迹运算。
设u∈H,H为一个确定的Hilbert空间,v是离散的高斯白噪声,其方差为σ2,B是一个有界线性算子,B*为B的伴随矩阵,则
利用“迹定理”证明
证明过程如下,其中I代表单位矩阵。
由式(9)、式(10)可知,式(8)成立。由此,UPRE函数的期望与预计风险的期望相同,最小化预计风险便可转化为最小化UPRE函数。将UPRE函数U(α)的最小值点称为最佳正则化参数,记为α*,则
3 UPRE方法的实验验证
UPRE方法要找到UPRE函数U(α)的全局最小值点,因此不适合采用一些诸如牛顿法的局部优化方法。此外,对于特定的正则化方法,如截断奇异值分解(Truncated Singular Value Decomposition,TSVD)方法,相应的U(α)可能会有跳跃点,故涉及导数的优化方法也不可行[4]。直接求U(α)的全局最小值点在计算上比较复杂,但由于α变动较小时相应的正则解变动也很小,故只需要计算近似的最小值点。在数值计算中,通常预先确定最小值点α*所在的范围,使问题得到简化。
实现UPRE方法的一般步骤如下:①分析模糊算子K的谱特点及噪声η的统计信息,确定α*所在的范围[αmin,αmax];②选取适当的网格剖分αmin<α1<…<αmax,其中第i个正则化参数取值记为αi(i=1,2,…,n),网格剖分应当满足Δlnαi=lnαi+1-由此可知相邻两个正则化参数之间有倍数关系,通常网格点不用太多,20个左右为宜;③基于UPRE函数U(α)的定义式(6),计算各个U(αi)的值;④选取U(αi)中的最小值点作为α*的近似;⑤把α*代入TV正则化方法中进行图像恢复[5]。
为了验证UPRE方法的正确性和有效性,对图2(a)所示的一幅256×256 Px的清晰图像进行运动模糊并添加高斯白噪声(见图2(b)),之后用UPRE方法迭代得到最佳正则化参数α*=0.023,再代入TV正则化方法进行图像恢复,结果如图2(c)所示,既保留了原图的部分细节如面部棱角和头发弯曲度等,又具备一定的光滑性。与之形成鲜明对比的是图2(d)和图2(e)。图2(d)正则化参数α=0.002,由于α太小导致结果不光滑;图2(e)正则化参数α=0.23,由于α太大导致结果过度光滑而细节失真。从恢复效果看,采用UPRE方法得到的最佳正则化参数,能够很好地恢复图像并提高图像质量。
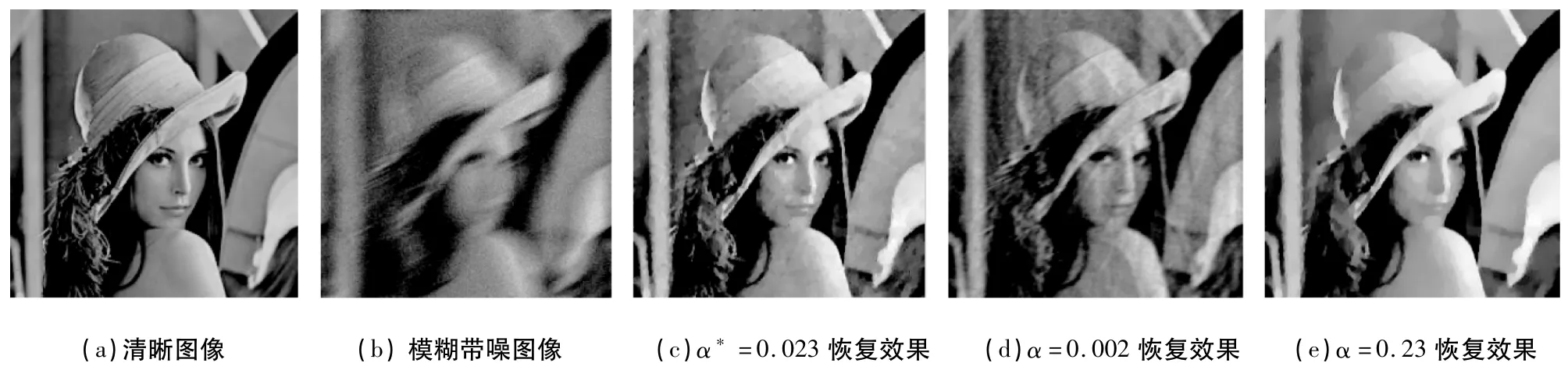
图2 采用UPRE方法的图像恢复效果及对比图
4 结论
针对正则化参数选择中过于依赖主观经验和大量实验的缺点,提出了一种自适应选择正则化参数的方法,即UPRE方法。该方法通过最小化UPRE函数来保证正则解逼近理想解,函数的最小值点即为最佳正则化参数。将UPRE方法应用到图像恢复中,通过数值实验验证了该方法的有效性。UPRE方法得到的最佳正则化参数能较好地维持图像保真项与图像光滑项之间的平衡,增强了恢复图像的清晰度和细节;因此,UPRE方法有助于改善图像恢复效果,能够在图像恢复相关领域进行推广使用。
