基于改进YOLOV7与StrongSORT 算法的列车司机手比行为检测*
2024-01-14宋吉超陈振棠周成才
宋吉超,黄 伟,陈振棠,周成才
(柳州铁道职业技术学院动力技术学院,广西柳州 545000)
当下人工智能(Artificial Intelligence,AI)技术的应用场景愈发广泛[1],轨道交通车辆的运营与维护领域也日渐成为了AI技术落地的热门领域[2]。列车司机驾驶行为的规范性直接影响到列车的行车安全,对于列车司机驾驶行为的监测是AI技术落地轨道交通领域的重要切入点。自2012年卷积神经网络(Convolutional Neural Network,CNN)模型Alexnet[3]被提出以来,CNN 在图像识别方面取得了重大突破。CNN 同样也推动了列车司机行为监控领域的进步与发展,李伟[4]通过CNN 对列车司机面部特征进行提取,随后将特征送入长短时记忆(Long Short Term Memory,LSTM)网络完成时序建模,增强了疲劳检测算法的适用性与有效性。姚巍巍等[5]采用人体关键点检测算法Pose proposal network,实现了对使用电话、站立、端坐、瞌睡、离岗等列车司机行为的识别,并将网络模型通过Tensor RT 加速优化后,在Jetson TX2中完成了实际部署。所达[6]通过区域三维卷积神经网络(Region Convolutional 3D Network,R-C3D)实现了对城轨列车司机确认手势的快速准确识别与起始时间的精确预测。何理[7]分别采用Deep LSTM、baseline Temporal Convolutional Network (TCN)、Spatial Temporal Graph Convolutional Networks(ST-GCN)模型实现了列车司机手势动作的识别,并通过对比分析验证了图卷积神经网络的有效性。
手比行为是列车司机驾驶过程中用以确认驾驶室仪表信息、确认道路信号信息等必须进行的微小手部动作,动作执行的到位率不仅影响着列车行驶过程中的乘务安全,而且也是评价列车司机驾驶合理性的重要标准[8]。现阶段业界主要通过人工抽检车载监控视频来分析司机手比行为执行的到位率,但是人工分析存在效果低下、质量不高以及容易出现遗漏等问题。因此,使用计算机视觉技术对列车司机手比行为进行有效识别能够帮助铁路机务部门进行日常的监控与管理[9]。
现阶段对于列车司机行为识别的研究多集中于对疲劳驾驶、玩手机等不规范行为的检测,而对列车司机手比行为的分析,特别是对动车组司机乘务作业过程中不同类型的手比行为分析,国内外的相关研究基本为空白。手比行为技术动作起源于日本,在日本被称为“指差确认”[10],目前主要是日本与中国的铁路系统使用该技术动作,欧美铁路系统较少应用手比行为技术。中国铁路系统中不同路局乘务作业标准对该技术动作的要求也有所区别。
为实现对列车司机乘务作业时手比行为的有效检测,本文依据某铁路局机务系统列车司机乘务作业时手比行为的标准化作业要求,分析不同类型手比行为的技术特征。由于手比行为是小目标,因此本文采用目标检测算法You Only Look Once Version 7(YOLOV7)进行检测[11],并通过融合注意力机制的方法对算法进行改进,以增强算法的检测效果[12]。针对司机乘务过程中手比行为不断变化的特点,采用Strong Simple Online and Realtime Tracking(StrongSORT)算法进行跟踪[13]。
1 准备工作
“手比眼看”是列车司机乘务作业时的规范准则。其中,“手比”指列车司机乘务作业时所进行的一系列手势动作。本文以某铁路局机务系统《CR400 型动车组司机一次乘务作业指导书》为依据,将列车司机乘务作业时的手比类型概括如图1所示。
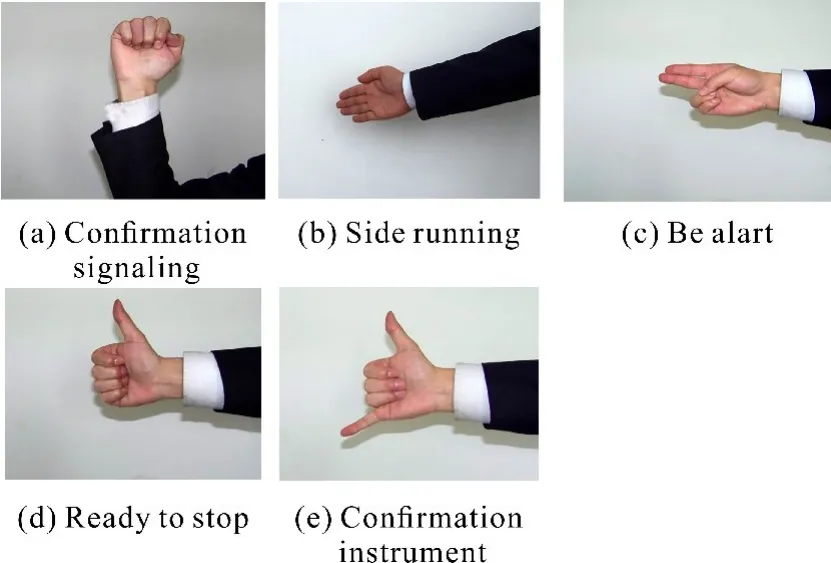
图1 手比类型Fig.1 Gesture type
检测司机手比行为主要存在2个难点:(1)列车司机乘务作业过程中,不同手势的变化主要为手指状态的改变,在监控画面中所占范围极小;(2)列车司机乘务作业过程中,列车运行指示信号的变化以及司机端坐、站立等不同状态都会造成手比行为在监控画面中位置的不同。图2为实时监控画面中列车司机做出的“准备停车”以及“确认仪表”的手比行为,可以看出手比行为在监控画面中是小目标,而且手势位置会随着列车的运行、信号的不同而发生变化。因此检测算法必须对小目标有着良好的跟踪检测能力。
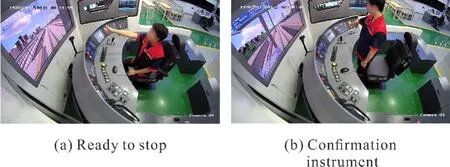
图2 监控画面Fig.2 Monitoring screen
本文的列车司机监控影像数据来自于畅想高科CR400BF动车组驾驶仿真系统所采集的实训操作影像。CR400BF型列车运行时,对列车司机手比行为的监控主要来自于侧方摄像头(图2),监控画面覆盖整个司机室,且画面清晰。司机室为独立、封闭的安全环境,不存在其他恶劣外界条件的干扰。
2 检测与跟踪算法
2.1 YOLOV7模型
YOLO 是Redmon等[14]于2016年提出的首个单阶段目标检测算法。该算法只需提取一次特征即可实现目标检测,目前已成为目标检测领域最具代表性的模型。2022年7月,Alexey团队发布了最新开源的 YOLOV7[15]。在相同体量下官方版的YOLOV7比YOLOV5精度更高,速度(单位为fps)快120%,比YOLOX 快180%,比Dual-Swin-T快1 200%,比Conv Next 快550%,比Swin-L 快500%。
YOLOV7 整体网络结构主要由以下3 部分组成:Input 层、Backbone 层、Head 层[16]。YOLOV7网络模型框架如图3所示。
总之,非瓣膜性房颤抗凝的要求就是通过消除折返治疗房颤,控制心室率,同时尽可能恢复窦性心律及防止血栓,以促进改善患者预后。
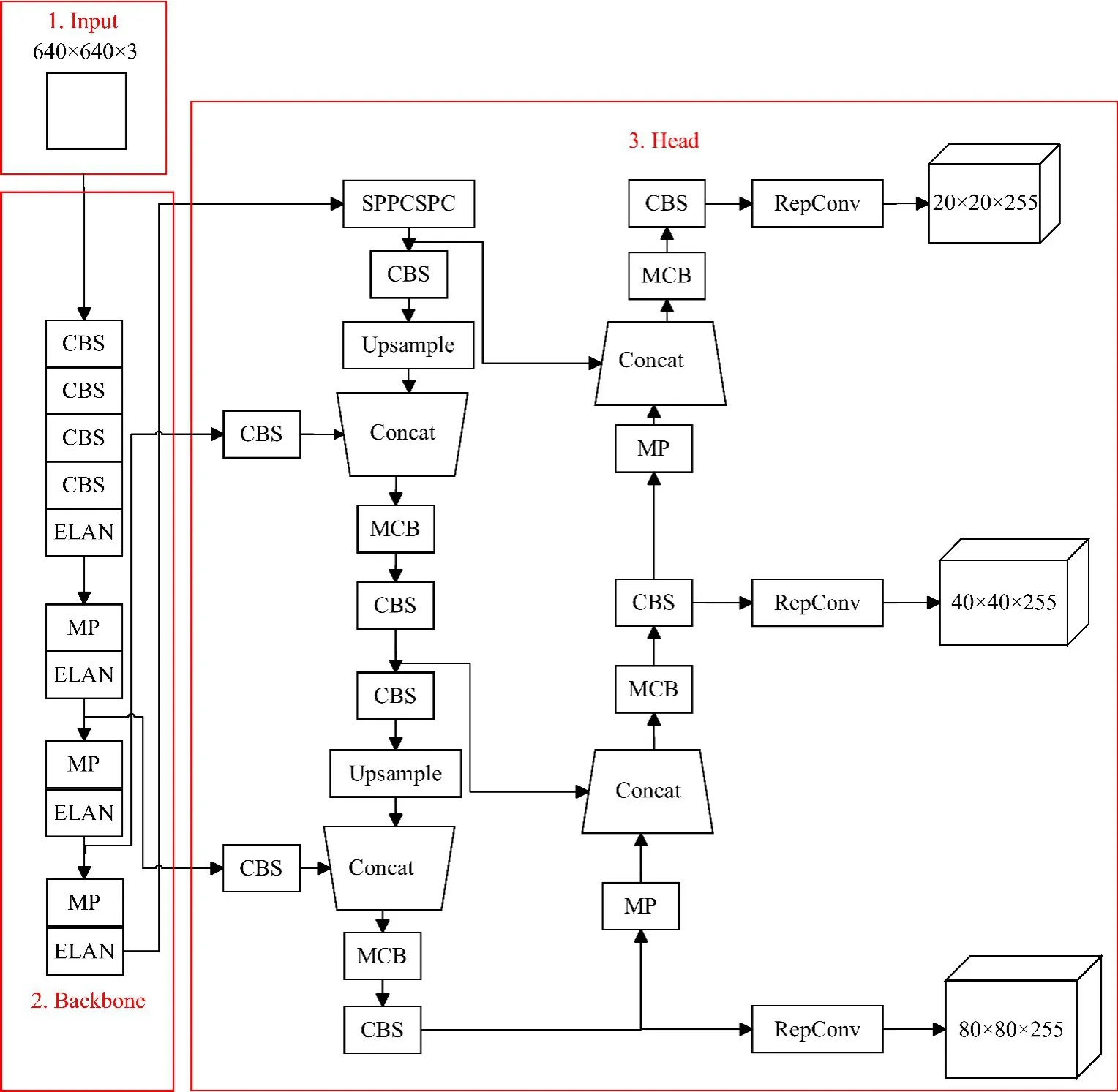
图3 YOLOV7模型框架Fig.3 YOLOV7 model framework
Input层采用一系列的方法对输入图片进行处理,从而达到数据增强的目的。Backbone层中CBS模块是卷积运算Convolution、批量归一化Batch normalization与激活模块Silu 的组合;ELAN 模块是由多个卷积拼接而成;MP 模块由最大池化Maxpooling和常规卷积组合而成。Head层中的SPPCSPC模块通过CBS与Maxpooling使算法的计算量降低、计算速度加快;MCB 模块由多个CBS 拼接而成;最后,Head层通过输出3组包含了置信度和像素坐标等信息的特征图,再利用非极大抑制消除多余框以寻找最佳的物体检测位置。本文算法使用Generalized Intersection over Union(GIo U)来计算定位损失。
2.2 注意力机制的融合
注意力机制在图像识别中的有效性已经得到证明[17]。图4为卷积注意力模块(Convolutional Block Attention Module,CBAM),注意力机制被用于获取特征图中可用的注意力信息,即经由通道注意力模块(Channel Attention Module,CAM)和空间注意力模块(Spatial Attention Module,SAM)两个子模块输出新的特征图。该模块通过强调重要特征并抑制一般特征,以提升目标检测效果。
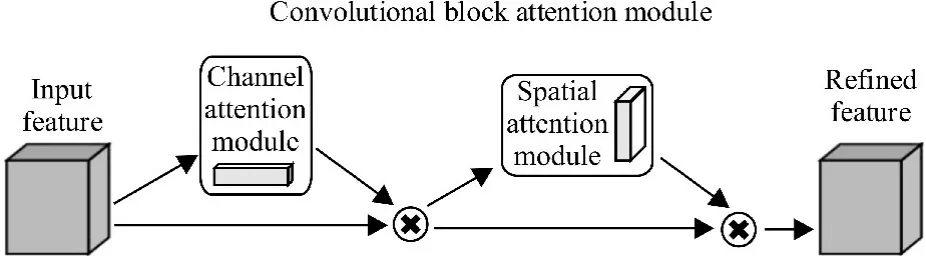
图4 CBAMFig.4 CBAM
为使注意力机制尽可能突出特征图中的关键信息,根据YOLOV7的特性,本文将CBAM 位置置于Backbone层与Head层之间,添加CBAM 后的模型网络结构如图5所示。
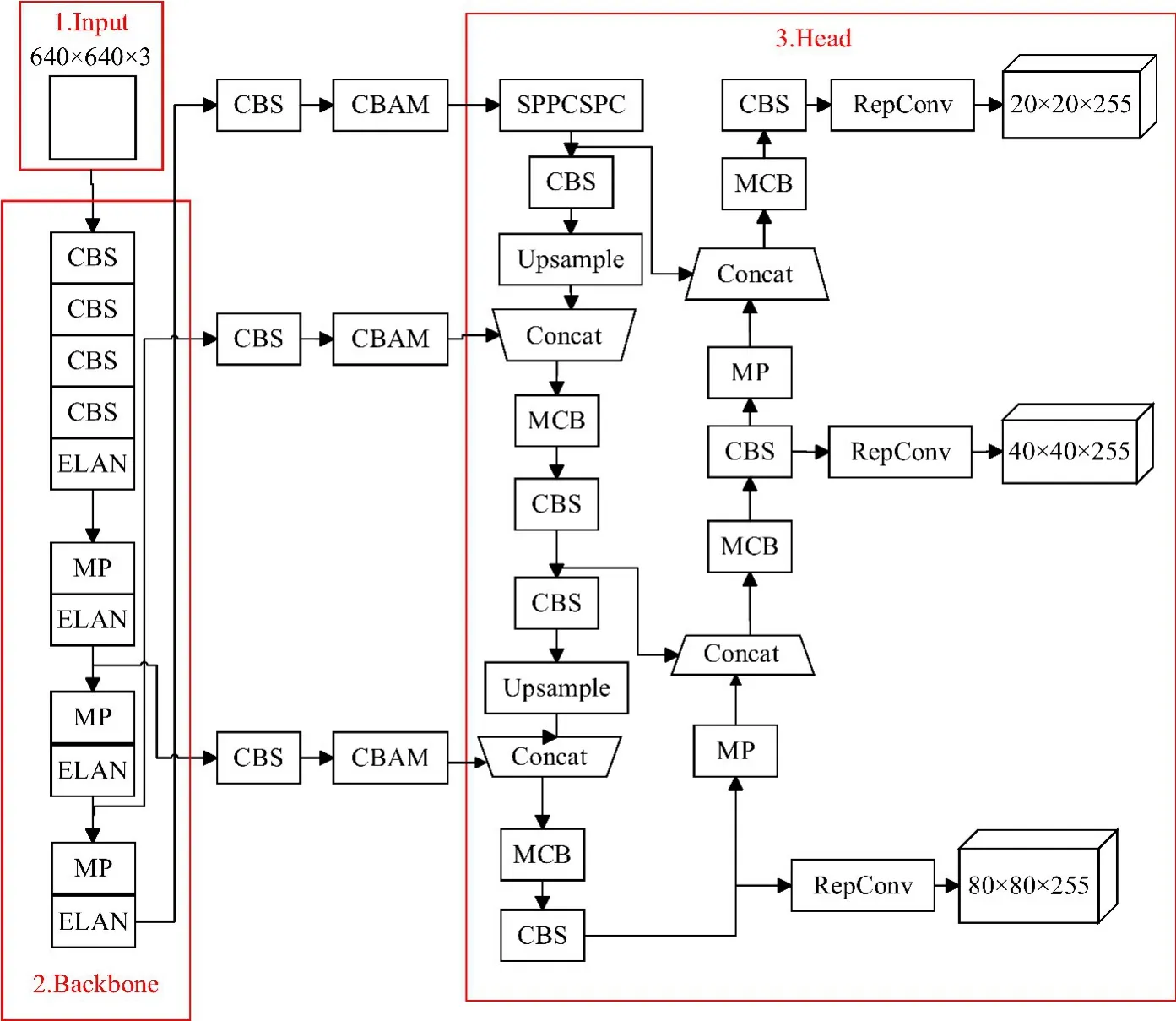
图5 融合CABM 后的改进YOLOV7网络Fig.5 Improved YOLOV7 network integrated with CABM
2.3 StrongSORT算法
考虑到列车司机进行手比行为时,手势位置不断发生变化,为提高检测的效果,本文采用了Du等[18]提出的StrongSORT 算法(图6),StrongSORT 算法是经典的DeepSORT 算法[19]的升级。StrongSORT算法具备通用性,可以应用在任何可用的视频目标检测模型上。
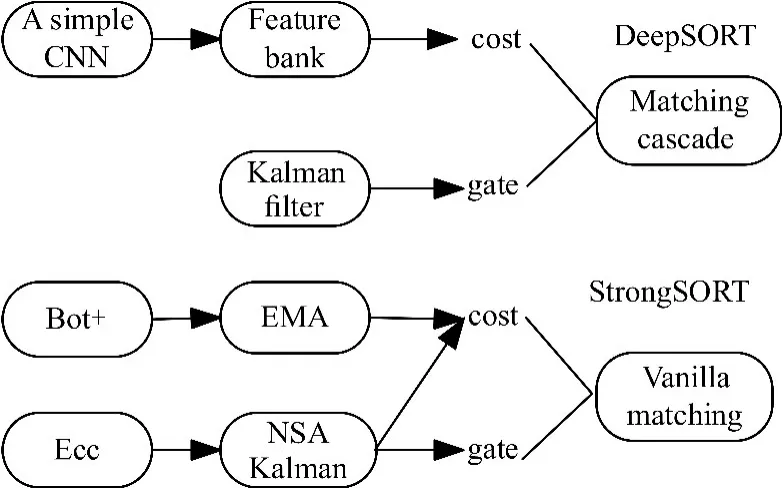
图6 DeepSORT 和StrongSORT 的应用原理Fig.6 Application principle of DeepSORT and Strong-SORT
StrongSORT 算法与DeepSORT 相比,在外观分支采用了更强的外观特征提取器Bot+取代原来简单的卷积神经网络,以ResNeSt50为骨干,可以采集更多的判别特征。此外用特征更新策略替换特征库,并以指数移动平均(Exponential Moving Average,EMA)方式更新帧t处的第i个轨迹的外观状态,计算公式如下
其中,fti是当前匹配检测的外观嵌入,α=0.9是动量项。对于运动分支,采用Enhanced Correlation Coefficient Maximization (ECC)进行相机运动补偿。
在卡尔曼滤波算法中,噪声尺度是一个常数矩阵。由于卡尔曼滤波器会受低质量检测的影响,从而忽略检测噪声尺度的信息,因此本文采用Noise Scale Adaptively(NSA)卡尔曼算法,通过公式(2)来自适应地计算噪声协方差[20]:
其中,Rk是预设的恒定测量噪声协方差,ck是状态k时刻下的检测置信度得分。即通过预先给定Rk,再根据k时刻检测到的置信度得分,以达到能在不同时刻自适应调整噪声斜方差,从而使估值更为准确。
本文将CABM 融合进YOLOV7,并将融合后的算法(Our algorithm)作为目标检测算法检测不同类型手比行为,接着将检测结果作为StrongSORT 算法的跟踪目标,以实现对列车司机乘务作业过程中手势的实时跟踪。
3 仿真实验与分析
3.1 实验数据
本文的数据集采集自柳州铁道职业技术学院10个班级400名不同学生在畅想高科CR400BF动车组模拟驾驶仿真实训设备中的某次乘务作业时的手比行为监控视频画面。每位学生在站立与端坐两种姿态下分别进行图1中的手比行为。将监控视频中每位同学在每种姿态下的5种手比行为各截取2张作为原始数据,即5种类型的手比行为各1 600张,共计8 000张图片,并按照7∶1的比例划分数据,即训练集7份,验证集1份。
采用Labelimg将上述数据标注为YOLO 格式。5种手比行为的标准代号分别为确认信号XH、侧线运行YX、注意警惕JT、准备停车TC 和确认仪表YB。标注数据时应当注意,由于列车司机仅用单手进行手比行为,此时若仅对手掌进行标注则会误检左右手掌,因此为避免左右手掌的干扰,标注时应对整个进行手比行为的手臂进行框选(图7)。

图7 行为标注Fig.7 Behavior labeling
3.2 实验环境搭建与参数配置
在进行模型训练前,需对计算机及YOLOV7模型的一些参数进行初始化设置。本文所进行的实验环境搭建与参数配置如表1所示。
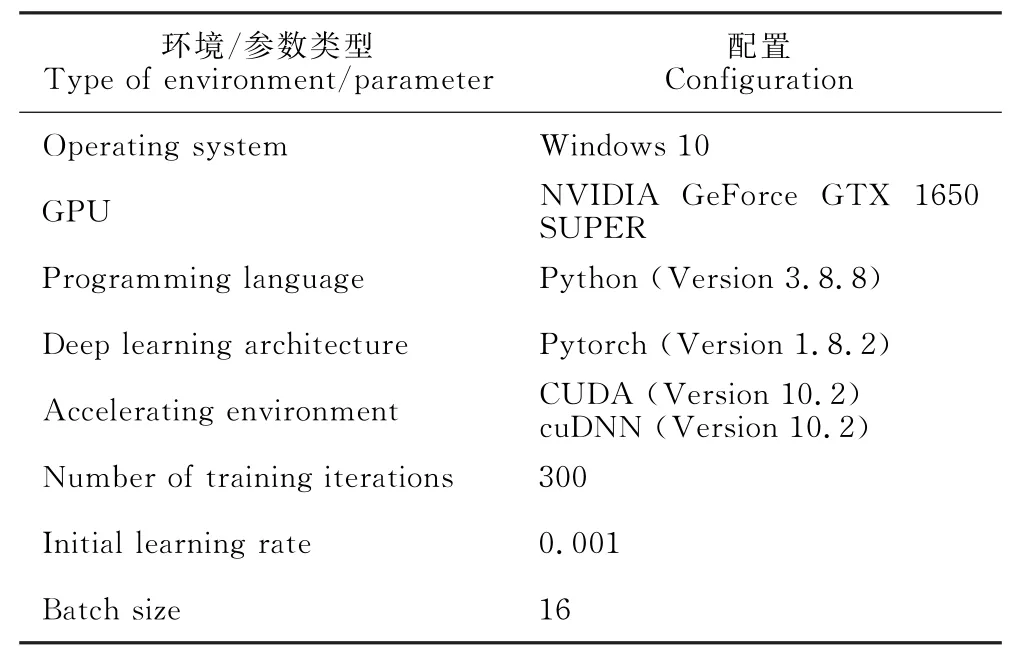
表1 实验环境与参数配置Table 1 Experimental environment and parameter configuration
3.3 评价指标
对于列车司机检测的评价既要全面又要准确,通常精确率(Precision)和召回率(Recall)两项指标可以评价这两点[21],两者构成的混淆矩阵如表2 所示。其中,FP表示将负类别预测为正类别的个数,TP 表示将正类别预测为正类别的个数,FN 表示将正类别预测为负类别的个数,TN 表示将负类别预测为负类别的个数。
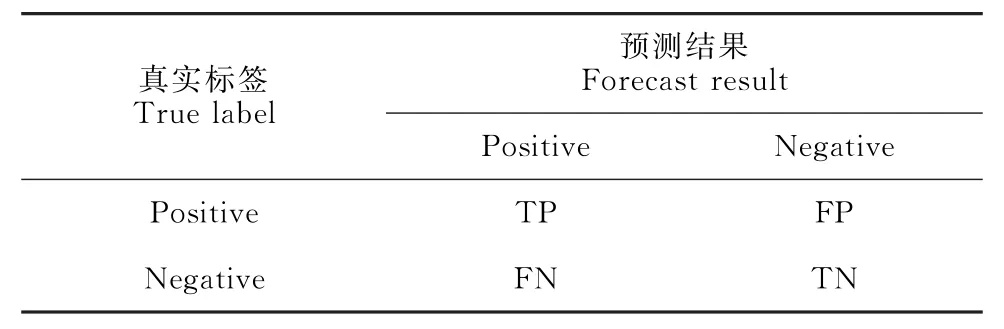
表2 混淆矩阵Table 2 Confusion matrix
精确率为预测正确的正样本个数除以真实的正样本个数[公式(3)],其可以评价检测的准确性。召回率为正确类别被模型预测正确的概率[公式(4)],其可以评价检测的全面性。
综上,本文采用精确率与召回率作为评价指标。
3.4 检测结果
图8为在训练300个迭代过程中,本文算法的损失函数曲线。可以看出,在前50个训练周期损失函数快速下降,在50-200个周期中损失函数的下降速度越来越缓慢,在200-300个训练周期中变化平稳,说明训练300个周期内损失函数逐步达到收敛状态。
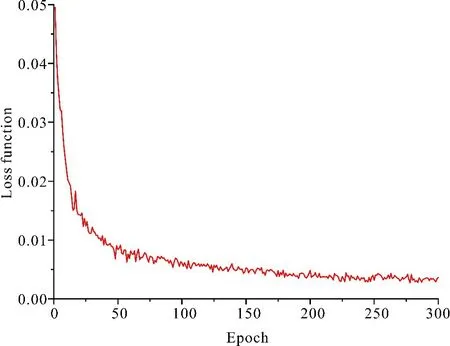
图8 损失函数Fig.8 Loss function
在训练300 个迭代周期后,本文算法与YOLOV7算法对各手比行为的检测结果见表3。由表3可知,YOLOV7的2项指标的平均值分别达到了95.3%、93.3%,对5种手比行为的精确率均达到92%以上,其中,JT 的识别精度最高,可能是因为注意警惕行为除手部行为外,还具备手臂成90°的明显特征。YX 与TC 的识别精确度较低,分别有7.6%和7.3%的错误率,这主要是因为这两个动作极为接近。侧线运行为握拳后比小拇指与大拇指,准备停车为握拳后比大拇指,两者的区别仅表现在小拇指上,两者差别过小。除YB 外的4种手比行为的召回率均达到93.0%以上,而YB的召回率仅为89.2%,说明对注意仪表行为的检测可能存在漏检。这可能是因为列车司机需要根据不同的仪表信息从左至右指认不同仪表。如开左门时,需要手指最左侧,而开右侧车门时需要手指最右侧。而监控摄像头仅在左侧,则在右侧指认时,距离及身体会遮挡摄像头部分视线,从而造成漏检。

表3 YOLOV7和本文算法的精确率、召回率Table 3 Precision and recall of YOLOV7 and our algorithm Unit:%
相比于YOLOV7算法,本文算法的效果有所提升。YX 精确率从92.4%提高到了94.6%,YC 精确率从92.7%提高到了94.8%。YOLOV7 存在确认仪表漏检的情况,而采用StrongSORT 算法后可以有效检出确认仪表行为,因此召回率从89.2%提高到了93.8%。在XH、JT 和TC的检测结果中,本文算法的精确率比YOLOV7分别提升了0.7%,0.6%和2.1%,召回率分别提高了1.9%、1.1%和1.1%。
图9、图10为两个算法的检测效果。图9中,第1、2行分别为注意停车和侧线运行的检测效果,这两种手势的区别仅表现在小拇指是否伸出。YOLOV7算法对注意停车与侧线运行存在混检,不能准确、有效地区分手指间的细小差别。经过改进后的本文算法可以准确检出被混检的图片类型。图10为不同算法对确认仪表的检测效果,因为图中手势确认的是右侧仪表,所以监控中手势画面大小相较在中间或左侧的更小,画质更低,这可能导致YOLOV7 算法未能有效检测出该画面,而本文算法可以将该情况下的手比准确检测为确认仪表。
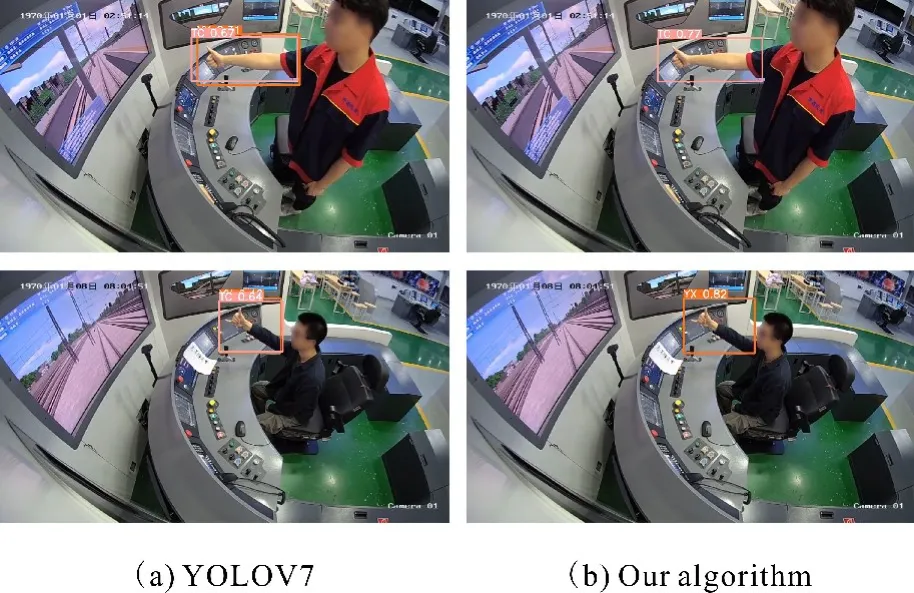
图9 注意停车与侧线运行检测效果Fig.9 Ready to stop and side running detection effect

图10 确认仪表检测效果Fig.10 Confirmation instrument detection effect
综上,采用融合注意力机制并添加StrongSORT算法可以有效地提高YOLOV7 算法的检测效果。主要是因为本文算法具有更加强大的特征提取功能,可以更有效地注意到图像中的小细节,比如手比行为中小拇指的变化。本文算法还可以更好地注意到图像不同时刻的变化特征,比如确认仪表中不同时刻手势移动产生的变化特征。
4 结论
本文从动车组模拟驾驶实训系统采集了列车司机乘务作业时的手比行为数据集,并使用融合注意力机制的YOLOV7卷积神经网络模型对列车司机不同类型的手比行为进行检测,再通过StrongSORT算法增强了对手比行为的检测。本文算法可以辅助铁路院校日常驾驶培训、机务部门考核列车司机乘务作业时的驾驶行为,是对车辆人员进行智能监测的重要一环。当然,对列车司机乘务作业时的监测与考核远非仅有手比行为一项,对列车司机的实时监测与有效考核的全面智能监测仍然是一项庞大且复杂的工作。
