海上油田无人平台技术现状与发展趋势
2024-01-13隋先富王隽妍
隋先富,邱 浩,张 甫,周 超,王隽妍
(中海油研究总院有限责任公司,北京 100028)
0 引 言
由于初期投资低、人员作业需求少、减少了人员在恶劣海况下的作业风险等优点,近年来,无人平台技术在海上油田开发中的应用逐渐引起了业界的关注[1、 2]。然而,由于无人值守平台通常没有修井机,没有生活配套设施,给后期的修井作业、生产维护也带来了很多问题。另外,设备可靠性、数据安全、通信技术等也是海上油田开发应用仍面临的一些技术挑战。本文旨在全面分析海上油田开发无人平台技术的发展现状,总结应用的主要技术及特点,分析存在的问题并提出对策。本研究将为海上油田开发无人平台技术的进一步研究与应用提供理论依据和实践指导。
1 海上油田无人平台技术发展现状
近年来,无人平台技术在海上油田开发领域取得了显著的进展,许多国家和地区的石油公司都在积极研究和应用无人平台技术,并取得了显著的经济效益和社会效益。技术主要涉及人工举升工艺、智能完井、修井工艺、无人监测与维护、自动化生产过程、远程操作等方面。
1.1 人工举升技术
1. 双电潜泵技术
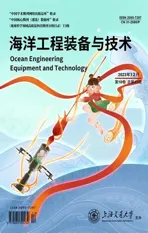
美国斯伦贝谢公司在2005年推出了双电潜泵智能化采油系统[3]。它是在一口油井中安装2套电潜泵,并且安装了压力、温度、振动等多个传感元件,采用变频器调速。井下传感器的信号通过光缆传输到地面,经过智能化系统控制变频器调整电潜泵的产量。其主要目的是延长电潜泵在油井中的工作寿命,减少安装费用。并且,根据井况变化调节电潜泵的产量,充分开发油藏的产能。考虑到在整个采油期间油藏条件的变化,2台电潜泵具有不同的结构,组合设计和安装时考虑到了2台泵的转换操作。安装有24h实时监控装置(温度、压力和振动等参数)和优化现场技术服务的仪表。由于双电潜泵显著增加了检泵周期,减少了修井需求,因此,在无人平台开发的油田中得到了广泛应用。其结构示意图如图1所示。
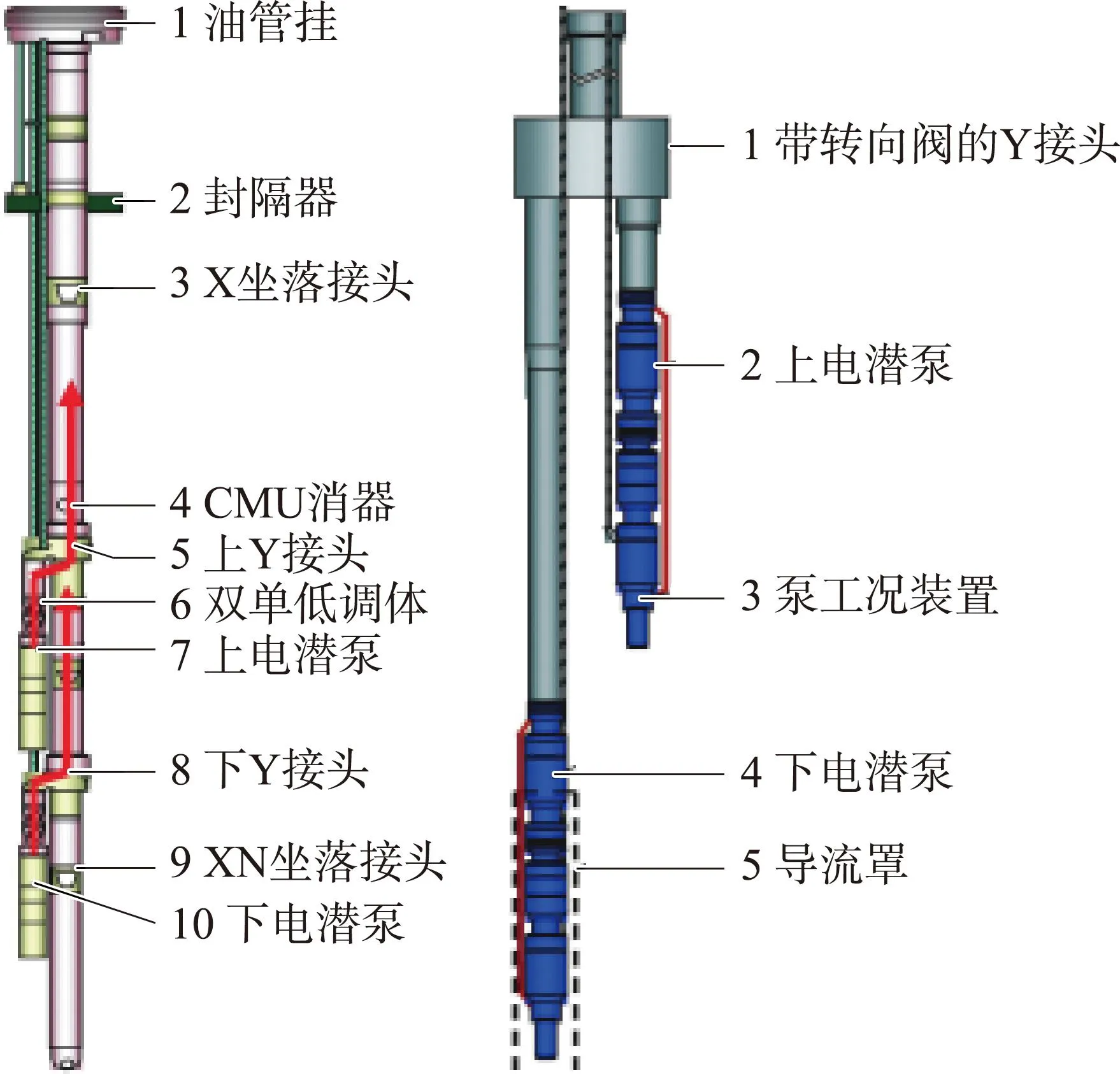
图1 双电潜泵管柱图
2. 钢丝投捞电潜泵技术
钢丝投捞电泵系统主体部分分为电泵机组和外筒两部分[4]。在完井或大修作业时,外筒利用修井机下入,电泵机组通过钢丝作业下入。管柱基本结构如图2所示。钢丝投捞电泵系统为油管内容纳潜油电泵机械结构,湿接头外筒与大直径油管外的电缆相连接,湿接头内筒连接在电泵机组最下部。钢丝作业投送电泵机组到位时,湿接头内筒和外筒插接相连,地面的电力通过大直径油管外的电缆传输至电泵机组,进而实现井液的传递。为了保证钢丝投捞电泵系统在井下正常工作,还设计了悬挂系统,实现湿接头内筒的悬挂与密封;设计了伸缩补偿系统,屏蔽电泵运转振动对湿接头的影响。湿接头系统包括触发机构,保证100%插入,防止误操作。由于该技术无法加装分离器,钢丝投捞电泵一般要求含气量小于30%;受钢丝下入限制,作业时要求井斜角不超过75°。另外,生产过程中还应严格控制出砂。

图2 钢丝投捞电泵示意图
3. 电缆投捞电潜泵技术
缆式投捞电泵技术可以用电缆或钢丝将电泵机组顺着油管内下入[5],通过电潜泵机组和生产油管上的湿接头内筒及外筒与电缆互连,传输地面的电力至电潜泵机组,实现井筒液体的传递,如图3所示。由于其特殊结构,电缆投捞技术一般适应产液量不超过300m3/d,泵挂深度不超过1500m,吸入口气液比不超过10%。

图3 电缆投捞管柱图
4. 连续油管投捞电泵技术
与常规的油管携带电潜泵不同,连续油管投捞[6]技术采用连续油管,携带电泵下入或者起出,节省了逐根链接油管作业的工序;电缆内嵌在连续油管内,降低了电缆损坏风险,提升了作业效率,如图4所示。目前,该技术已经在绥中36-1油田成功进行了试验。连续油管投捞技术下泵深度不宜超过2000m,泵入口温度不超过80℃,温度过高对管材要求较高,会大幅提高作业成本。

图4 连续油管投捞管柱图
1.2 智能完井技术
完整的智能完井系统包括井下流量控制单元、生产动态监测单元、数据传输单元,以及地面数据采集、处理及生产优化管理单元4部分。通过井下安装油气生产信息的永置性传感器,实时采集传输井下压力、温度、流量等参数,基于数据分析形成油藏管理决策信息,并反馈到井下对生产动态进行远程实时控制的生产系统,如图5所示。

图5 智能完井管柱示意图
1. 智能分采技术
压控式智能分采[7]工艺管柱结构如图6所示,包括上部生产管柱和丢手分层管柱。其中,生产管柱为常规潜油电泵合采管柱,丢手分层管柱从上至下依次连接丢手工具、定位密封装置、多级压控配产器、多级插入密封装置和导向丝堵。每一层位分别安装1套压控配产器,层位数决定着所需下入压控配产器的数量。压控配产器作为核心部件,具有独立的采油通道和酸化通道,可实现地面远程压力波遥控分层采油和定点注酸。丢手工具可根据实际井况(如井深和井斜)选择不同类型丢手方式,包括机械丢手和液压丢手。机械丢手通过旋转管柱方式实现丢手,液压丢手可通过投球加压或井口液压式实现丢手。不同层位间的封隔与密封通过定位密封装置和插入密封装置实现。导向丝堵安装于丢手分层管柱的最底端,起导向作用。

图6 智能分采管柱示意图
2. 注水井一体化测调技术
在电缆永置智能测调分层注水技术[8~17]中,井下工艺管柱主要由智能测调工作筒、过电缆插入密封、井下钢管电缆、过电缆定位密封、安全阀、滑套等组成,地面设备主要由地面控制器及控制计算机组成,如图7所示。在空心集成分层注水技术等渤海油田常规分层注水技术中,工作筒与配水器各自独立,调配时需通过钢丝作业逐级投放、打捞配水器,并更换水嘴。电缆永置智能测调分层注水技术将工作筒与配水器合二为一,并将温度、压力、流量等测试单元集成于工作筒中,随管柱一同下入井内,通过钢管电缆与地面控制器相连;地面控制器再通过无线或电缆等方式与平台中控室的控制计算机相连。采用电缆永置智能测调技术进行测调时,仅需通过控制计算机发送所需命令,地面控制器便会进行相应的编码、解码,并通过井下钢管电缆将信号传至井下智能测调工作筒;智能测调工作筒接到命令后进行相应动作并反向返回数据信息,经由地面控制器解码后反馈至控制计算机,实现远程智能测调。
1.3 修井技术
1. 可搬迁修井机作业技术[18]
搬迁修井机作业方式在我国海上油气田已经有较好的应用。各区块钻修机的驱动形式、滑轨跨距、作业能力等存在诸多不同。搬迁修井机修井需将待作业平台与修井机资源匹配,修井机具的作业能力须满足目标井作业要求。另一方面,待搬迁修井机须与目标平台的动力系统一致,滑轨跨距尽可能与目标平台相同。否则,需改造修井机底座,工作量大,且会增加额外费用,还有可能由于不满足平台稳性校核而无法搬迁。
2. 液压修井机作业技术
液压修井机是一种可以搬迁式修井设备。早在1960年,液压举升装置就在北美用于修井作业。目前,国内湛江、上海以及海南均有作业案例。修井作业时,液压举升装置主体部分在平台上作业,泥浆罐、泥浆泵、灌注泵等辅助系统布置在旁边的支持船上。液压修井机具有结构紧凑、拆装灵活的特点,是无人平台修井作业方式的一项重要手段。其主要缺点在于受天气海况影响大,作业时效低,通常适用于6级风以下的工况。
1.4 远程操作、监测技术
远程操作技术通过先进的通信技术和控制系统,实现海上油田设备和作业的远程监控和操作,减少现场作业人员,降低人员安全风险。例如,垦利6-1油田通过电潜泵、油嘴和安全阀等设备进行远程操控[19],通过配置智能采油系统对电泵井和注水井的实时工况进行在线监测,利用电气设备在线监测系统对电气设备的数据整合传输、集中显示、监测预警等。远程操作中心可以实现对海上油田的集中监控和管理,提高作业效率和安全性。
1.5 无人监测与维护技术
无人监测与维护技术通过无人机、无人潜水器、智能机器人等设备进行远程巡检、监测和维护,降低人员在恶劣海洋环境中的作业风险,提高作业效率。尤其是无人巡检机器人技术目前已经非常成熟[20~25],在很多行业领域有了规模化应用,未来这些无人设备将在海上油田的设备巡检、环境监测等方面发挥重要作用。
1.6 其他技术
海上油田开发是一项涉及多专业多学科的系统工程。除了前文提到的技术,其他诸如无人平台登临技术、计量技术、通信技术、防腐技术、批量修井综合评价技术、海管置换技术等,都是保障无人平台高效开发重要组成部分[26~39]。
2 海上油田无人平台技术发展趋势
2.1 无人平台集成与协同作业
随着无人平台技术的发展,未来将实现多种无人设备(如无人潜水器、无人船、无人机等)的集成与协同作业,提高海上油田开发的效率和安全性。这种集成将充分发挥各类无人设备的优势,实现海上油田开发过程中的多任务处理和自主决策。
2.2 智能完井和人工智能技术的应用
测压、测试、调配、井下计量、井下工具控制是油气井生产过程中的常见问题,因此,经常需要人员登平台作业,尤其是动管柱作业还需要动用钻井船。这些工作会带来巨额的维护费用。越来越多的智能完井工具的应用将大大降低这些作业需求,进而减少作业成本。
人工智能技术也将在无人平台的海上油田开发中发挥更加重要的作用。引入大数据、机器学习等技术,可以实现海上油田开发过程中的数据智能分析和处理,提高生产效率和降低故障率。
2.3 无人值守海上油田生产系统
未来,无人平台技术有望实现对海上油田生产系统的全程无人值守。通过完善远程监控、自动化控制和智能优化算法等技术,可以大幅降低海上油田开发的成本和安全风险。
2.4 绿色环保技术的融合
随着环保要求的提高,未来无人平台技术将与绿色环保技术相结合,实现海上油田开发过程中的低碳排放和环境友好。例如,采用清洁能源驱动的无人设备,减少海上油田开发对海洋环境的影响。
3 结论与建议
(1) 本文系统总结概括了当前无人平台开发过程中的主要技术及其特点,为其他海上油田无人平台开发提供了借鉴。
(2) 由于平台无人驻守,如何减少平台作业维护工作量是油田开发管理人员需要面对的关键问题。采用先进技术减少修井工作量、减少油气井人员作业需求是当前需要考虑的关键问题,智能完井技术、人工智能管理技术、先进的人工举升技术和修井技术都是有益的参考。