基于自适应控制的多智能体一致性跟踪系统设计
2024-01-12周振超
沈 超,周振超
(辽宁科技学院 电气与自动化工程学院,辽宁 本溪 117004)
0 引言
近年来,随着计算机与电子通讯技术的迅猛发展,分布式控制的多智能体网络逐渐成了研究热点。智能体是集智能处理器、传感器以及执行器于一身,并以此完成预期目标的具有自学习能力的自治实体。因此,多智能体系统就是由多个智能体构成的、可以独立测量和感知其周围环境,并基于一定的通信协议交换网络状态信息,通过相应的计算来指导其自身行动,最终达到协作目的的自治网络[1]。所以,多智能体网络能够有效地处理现实世界中分布式动态变化网络的控制问题,对解决网络中的复杂性问题有明显的优势[2]。多智能体网络已被广泛应用于工业、农业、国防军事和日常生活中,并成为一种对复杂系统进行分析、设计和建模的行之有效的方法和工具[3]。
然而,多智能体系统常常由于在实际应用环境下不可避免地存在非线性因素,而使多智能体系统的一致性性能受到严重影响。对此,自适应控制技术可以有效地解决该问题[4]。因此,文章在实际系统存在死区输入非线性的情形下,设计了多智能体一致性自适应跟踪控制系统。该多智能体一致性跟踪系统的硬件部分由基于自适应H∞控制策略的控制器模块与通讯模块组成。系统的软件部分由自适应控制模块和智能体调度模块组成,以保证多智能体系统的一致性运行。实验结果表明,所设计的多智能体系统一致性得到了显著改善, 体现了该多智能体系统一致性设计的有效性。
1 多智能体一致性跟踪系统硬件设计
多智能体一致性跟踪系统的硬件部分基于H∞控制策略,设计了自适应控制器单元与通讯单元。
1.1 自适应控制器单元
为了满足多智能体系统的一致性要求,利用多智能体的自学习特性,采用一款自适应控制器,该控制器由电源、中央处理模块、存储器模块、输入输出模块和通讯模块构成[5]。
1.2 通讯单元
根据多智能体系统的设计需求,采用TCP/IP协议作为系统交换信息的通讯协议。该协议能够实现不同应用程序之间的链接与数据信息交换。
节点与服务器交互方式主要包括面向连接与面向无线连接两种方式。面向连接方式可靠性较高,能够确保数据的可靠交换,并且对于未接收的数据,会自动启动重新传输机制。因此,本多智能体一致性系统采用面向连接方式实现数据信息的交换。
2 多智能体一致性跟踪系统的软件设计
多智能体一致性跟踪系统的软件部分以上面设计的硬件单元为平台,包括了自适应控制模块与智能体调度模块。
2.1 自适应控制单元
自适应控制单元的核心就是设计自适应控制器。存在外部非线性输入的多智能体系统如下:
(1)
τi=Ni(ui)
(2)
其中,xi∈R为系统状态;τi∈R为输入;θ1i∈Rm为未知参数向量;ωi∈Rm为回归向量;未知参数bi>0,以及ui(t)为实际控制输入信号。控制目标是实现领导者-跟随者的一致性跟踪。Ni(ui)表示式(3)所示的死区输入非线性[6]方程。
τ=[τ1,…,τN]T=N(u)
=[N1(u1),…,NN(uN)]T
(3)
(4)
其中,bli<0
相应地死区特性如下:
(5)
(6)
(7)
输入信号τi如下:
τi=mri(ui-bri)σr(τi)+mli(ui-bli)σl(τi)
(8)
以下对输入死区非线性的特性进行估计,
(9)
(10)
(11)
其中,τdi为理想输入信号,并且可得:

(12)
(13)
ω2i=[uixri(τdi),xri(τdi),uixli(τdi),xli(τdi)]T
(14)

以下估计τi与τdi间的误差,
(15)
(16)

(17)
总残差项d0i满足
|d0i|<∞
(18)
自适应控制器设计如下,定义为:
Ω2=diag(ω21,…,ω2N)
(19)
(20)

(21)
τd=[τd1,…,τdN]T
(22)
d0=[d01,…,d0N]T
(23)
由此可得一致性跟踪[7]:
(24)
(25)
si(t)=xi(t)-xri(t)
(26)

(27)

(28)

(29)
由此可得:

(30)
从而可得多智能体系统为:
(31)
(32)
Ω1=diag(ω11,…,ω1N)
(33)
(34)
U0=diag(u10,…,uN0)
(35)
(36)
(37)
B=diag(b1,…,bN)
(38)
N0=[n10,…,nN0]T
(39)
1=[1,…,1]T
(40)
v=[v1,…,vN]T
(41)
其中,-Mc为赫尔维茨矩阵。
以下设计自适应H∞一致控制器,选定正定函数W0为:

(42)
b=[b1,…,bN]T
(43)

(44)

(45)
V=diag(v1,…,vN)
(46)
(47)
根据式(47)引入如下虚拟系统
(48)
f=0
(49)
(50)
(51)
该虚拟系统由控制输入V通过H∞准则来镇定,d1、d2、d3可看作系统的外部干扰[9],因此引入如下HJI (Hamilton-Jacobi-Isaacs)方程及其解V0。
+q=0
(52)
(53)

(54)
从而得
(55)
(56)
其中,K为对角正定矩阵。 根据式(55)可得,相应的H∞控制的解v为:
(57)

(58)
由此可得如下部分自适应控制系统。
(59)
且有:
(60)


(61)

(62)

(63)
(64)
定理2 完全自适应控制系统(9)、(27)、(44)、(45)、(57)、(61)、(62)一致有界,且有:
(65)
对于系统一致性跟踪误差xi-x0的稳定性分析,定义
(66)
(67)
(68)
(69)
从而
(70)
其中,-Mα是基于网络图假设的赫尔维茨矩阵。由此可得如下全局自适应控制系统。
定理3 全局自适应控制系统(9)、(27)、(44)、(45)、(57)、(61)、(62)一致有界,且有:
(71)
2.2 智能体调度模块
智能体调度的具体步骤如下:
Step1 创建信使命令传输给分布式调度者,并调用API函数执行该命令;
Step2 等待信使传入自身的窗口句柄,在接收到窗口句柄后,将其作为命令参数传输给各智能体;
Step3 各个智能体通过对接收到的命令参数进行分析,从而对智能体进行调度[10]。
通过以上设计的硬件单元与软件单元,实现了多智能体一致性系统的稳定运行。
3 实验结果与分析
为了验证所设计的多智能体系统的一致性性能,在Matlab软件环境中进行了相关仿真参数设置(取等),通过与现有非自适应系统性能对比分析,进行了所设计的多智能体一致性系统的仿真实验,得到了相应的多智能体系统状态随时间变化的过程曲线,如图1所示。
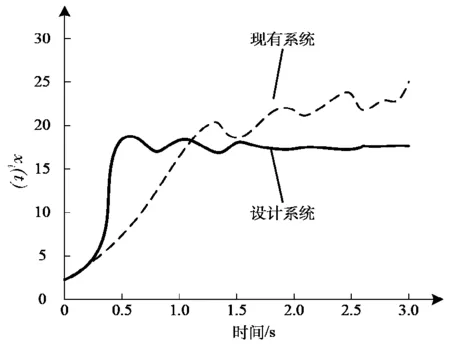
图1 多智能体系统状态随时间的变化曲线
通过图1不难看出,随着系统运行时间的推移,传统的非自适应多智能体系统的状态表现出持续发散的特征,而所设计的自适应多智能体系统的状态却能够逐渐达到稳定,系统一致性得到了显著改善,验证了系统设计方法的有效性。
4 结论
针对外部输入非线性对多智能体系统一致性性能的影响,基于自适应控制算法设计了一种多智能体跟踪系统。该设计显著地改善了系统的一致性性能,可以满足系统在外部环境存在非线性输入的应用需求,为多智能体系统的推广与应用提供了一定的参考方向。